一种具有力反馈功能的丝传动手术器械的制作方法
一种具有力反馈功能的丝传动手术器械
[技术领域]
[0001]
本发明涉及丝传动手术器械领域,具体地说是一种可用于微创手术机器人并在手术过程中提供实时的力反馈功能的丝传动手术器械。
[
背景技术:
]
[0002]
进入21世纪以来,随着科技的发展与进步,微创手术机器人已经在世界范围内被越来越多的医院与医生接受,并被用于各种临床外科手术以改善传统微创手术在精度、除颤等方面的不足。微创手术机器人通常比传统微创手术器械具有更高的自由度,且能到达更加狭窄的区域,但就目前而言,微创手术机器人仍然存在着诸多不足之处,例如:手术器械结构复杂,可靠性和寿命较短,需要经常更换,且手术器械普遍没有力感知功能,医生在控制端操作时无法感受器械末端的牵拉力等。
[0003]
参考专利申请公布号为cn113208736a的发明专利申请,其提出的器械驱动装置与手术器械具有较高的自由度,可以实现较为复杂的手术操作,但仍然存在结构设计复杂,装配可靠性较低的问题。同时,对于精密零件的加工精度要求较高,也导致了器械成本的上升。另外,该发明专利申请提出的手术器械仍不具备末端力感知的功能,无法为操作的医生提供精确的力反馈信息。
[
技术实现要素:
]
[0004]
本发明的目的就是要解决上述的不足而提供一种具有力反馈功能的丝传动手术器械,提高了器械的可靠性与使用寿命,降低了加工制造成本,同时通过增加力反馈功能,提高了手术机器人操作手术的安全性与便利性。
[0005]
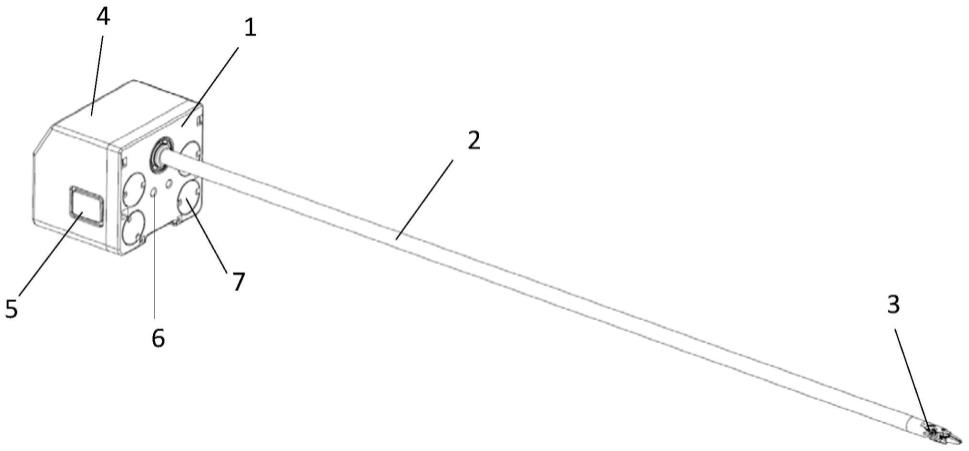
为实现上述目的设计一种具有力反馈功能的丝传动手术器械,包括基座1、空心杆2、器械末端3和器械盒盖4,所述器械末端3安装于空心杆2前端,并随空心杆2一起沿杆轴线转动,所述空心杆2尾端固定在器械盒的基座1上,所述基座1另一侧安装有器械盒盖4,所述基座1上装有可分别独立旋转的四个离合盘7,所述离合盘7用于与动力盒里的电机对接,并在电机的驱动下控制器械末端3运动,所述空心杆2前后两端的内侧各装有两个应变片21,所述应变片21用于实时检测其微应变信息并传递至医生控制台,使医生在进行操作的手感知到主手反馈的受力信息。
[0006]
进一步地,所述器械盒内安装有从动线轮8、主动线轮9、驱动线轮11和转向线轮15,所述空心杆2尾端穿过基座1后与从动线轮8固定连接,所述从动线轮8通过钢丝绳一10与主动线轮9连接,所述主动线轮9固定在其中一个离合盘7背面的轴上,所述空心杆2通过从动线轮8和主动线轮9随着离合盘7的转动而转动;所述驱动线轮11两两一组分别固定在其余三个离合盘7背面的轴上,所述驱动线轮11上固定连接有钢丝绳二16,所述钢丝绳二16另一端通过转向线轮15转换方向之后穿过空心杆2的中空部分,并与器械末端3固定连接。
[0007]
进一步地,所述转向线轮15两两一组分别固定在线轮支架一12、线轮支架二13、线轮支架三14上,且空间上呈依次错位布置,以避免各钢丝绳二16发生运动干涉。
[0008]
进一步地,所述基座1上通过螺钉18固定有轴承支架17,所述轴承支架17上固定有轴承19,所述轴承19与离合盘7背面的轴固定在一起,所述离合盘7通过轴承支架17和轴承19稳定旋转且背面的轴不因悬臂距离过大而发生变形。
[0009]
进一步地,所述器械盒盖4内侧装设有弹簧片20,所述弹簧片20呈u字型结构,所述弹簧片20两侧分别装有器械释放按钮5,所述器械释放按钮5用于从手术机器人的机械臂上拆卸器械盒。
[0010]
进一步地,所述基座1上设置有器械安装的导向销孔6,所述器械安装的导向销孔6用于器械安装时导向之用。
[0011]
进一步地,所述应变片21通过机械臂控制板连接患者手术平台的主控制板一,所述应变片21实时检测其微应变信息并通过机械臂控制板传递给主控制板一,所述主控制板一电连接医生控制台的主控制板二,所述主控制板二电连接主手电机驱动器,所述主手电机驱动器连接主手电机,并将运动控制命令发给对应的主手电机,所述主手电机与医生操作手相连接,进而使医生操作手感知到主手电机反馈的受力信息。
[0012]
本发明同现有技术相比,提供了一种具有力反馈功能的丝传动手术器械,该丝传动手术器械极大地简化了结构设计与装配工艺,提高了器械的可靠性与使用寿命,降低了加工制造成本,并通过增加力反馈功能,使得医生能够如传统腹腔镜手术一般实时感知手术过程中器械受到的作用力,提高了手术机器人操作手术的安全性与便利性,值得推广应用。
[附图说明]
[0013]
图1是本发明的立体结构示意图;
[0014]
图2是本发明器械驱动盒的内部结构图一;
[0015]
图3是本发明器械驱动盒的内部结构图二;
[0016]
图4是本发明器械盒盖及相关组件的装配示意图;
[0017]
图5是本发明力反馈元件的结构示意图一;
[0018]
图6是本发明力反馈元件的结构示意图二;
[0019]
图7是本发明力反馈路径的原理示意图;
[0020]
图中:1、基座 2、空心杆 3、器械末端 4、器械盒盖 5、器械释放按钮 6、器械安装的导向销孔 7、离合盘 8、从动线轮 9、主动线轮 10、钢丝绳一 11、驱动线轮 12、线轮支架一 13、线轮支架二 14、线轮支架三 15、转向线轮 16、钢丝绳二 17、轴承支架 18、螺钉 19、轴承 20、弹簧片 21、应变片。
[具体实施方式]
[0021]
本发明提供了一种具有力反馈功能的丝传动手术器械,包括基座1、空心杆2、器械末端3和器械盒盖4,器械末端3安装于空心杆2前端,并随空心杆2一起沿杆轴线转动,空心杆2尾端固定在器械盒的基座1上,基座1另一侧安装有器械盒盖4,基座1上装有可分别独立旋转的四个离合盘7,离合盘7用于与动力盒里的电机对接,并在电机的驱动下控制器械末端3运动,空心杆2前后两端的内侧各装有两个应变片21,应变片21用于实时检测其微应变信息并传递至医生控制台,使医生在进行操作的手感知到主手反馈的受力信息;基座1上设
置有器械安装的导向销孔6,器械安装的导向销孔6用于器械安装时导向之用。
[0022]
其中,器械盒内安装有从动线轮8、主动线轮9、驱动线轮11和转向线轮15,空心杆2尾端穿过基座1后与从动线轮8固定连接,从动线轮8通过钢丝绳一10与主动线轮9连接,主动线轮9固定在其中一个离合盘7背面的轴上,空心杆2通过从动线轮8和主动线轮9随着离合盘7的转动而转动;驱动线轮11两两一组分别固定在其余三个离合盘7背面的轴上,驱动线轮11上固定连接有钢丝绳二16,钢丝绳二16另一端通过转向线轮15转换方向之后穿过空心杆2的中空部分,并与器械末端3固定连接;转向线轮15两两一组分别固定在线轮支架一12、线轮支架二13、线轮支架三14上,且空间上呈依次错位布置,以避免各钢丝绳二16发生运动干涉。
[0023]
本发明中,基座1上通过螺钉18固定有轴承支架17,轴承支架17上固定有轴承19,轴承19与离合盘7背面的轴固定在一起,离合盘7通过轴承支架17和轴承19稳定旋转且背面的轴不因悬臂距离过大而发生变形。器械盒盖4内侧装设有弹簧片20,弹簧片20呈u字型结构,弹簧片20两侧分别装有器械释放按钮5,器械释放按钮5用于从手术机器人的机械臂上拆卸器械盒。应变片21通过机械臂控制板连接患者手术平台的主控制板一,应变片21实时检测其微应变信息并通过机械臂控制板传递给主控制板一,主控制板一电连接医生控制台的主控制板二,主控制板二电连接主手电机驱动器,主手电机驱动器连接主手电机,并将运动控制命令发给对应的主手电机,主手电机与医生操作手相连接,进而使医生操作手感知到主手电机反馈的受力信息。
[0024]
下面结合附图和具体实施例对本发明作以下进一步说明:
[0025]
本发明提出了一种具有力反馈功能的丝传动手术器械,如附图1至附图7所示,器械末端3安装于空心杆2的前端,并可随空心杆2一起沿杆轴线转动;空心杆2的尾端固定在器械盒基座1上,基座1上装有可分别独立旋转的四个离合盘7,用于与动力盒里的电机对接,从而在电机的驱动下控制器械末端运动。
[0026]
具体地,空心杆2的尾端穿过基座1后与从动线轮8固定在一起,从动线轮8通过钢丝绳一10与主动线轮9连接在一起,主动线轮9固定在离合盘7背面的轴上,从而使空心杆2随着离合盘7的转动而转动。六个驱动线轮11两两一组分别固定在其余三个离合盘7背面的轴上,钢丝绳16一端固定在驱动线轮11上,另一端通过转向线轮15转换方向之后,穿过空心杆2的中空部分与器械末端3固定在一起。六个转向线轮15两两一组分别固定在线轮支架一12、线轮支架二13和线轮支架三14上,空间上呈依次错位布置,有利于避免各钢丝绳发生运动干涉,简化装配工艺,并可提高该器械驱动机构的可靠性。轴承支架17通过螺钉18固定在基座1上,轴承19固定在轴承支架17上,并与离合盘7背面的轴固定在一起,从而使得离合盘7可以稳定的旋转且背面的轴不因悬臂距离过大而发生变形。器械盒盖的内侧装有弹簧片20,弹簧片20两侧装有器械释放按钮5,可用于从手术机器人的机械臂上拆卸该器械盒。
[0027]
同时,空心杆2内侧的前后两端各装有两个应变片21,在手术操作过程中,应变片21实时检测其微应变信息并通过机械臂控制板传递给患者手术平台的主控制板,主控制板根据收集到的微应变信息通过计算得出器械末端受到的沿x,y,z三个方向的作用力的信息,并传递给医生控制台的主控制板。医生控制台的主控制板收到信息后通过计算,得出主手端需要反馈给医生的受力信息并传递给主手电机驱动器,该驱动器随后将运动控制命令发给对应的主手电机,从而使得医生在进行操作的手能够感知到主手反馈的受力信息,并
根据受力情况及时调整器械末端的手术操作。
[0028]
综上所述,本发明丝传动手术器械极大地简化了结构设计与装配工艺,提高了器械的可靠性与使用寿命,降低了加工制造成本,并通过增加力反馈功能,使得医生能够如传统腹腔镜手术一般实时感知手术过程中器械受到的作用力,提高了手术机器人操作手术的安全性与便利性。
[0029]
本发明并不受上述实施方式的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1