落差消除式移位机及其落差消除工艺的制作方法
1.本发明属于医疗器械领域,具体涉及一种落差消除式移位机,同时还涉及一种移位机的落差消除工艺。
背景技术:
2.目前,针对生活自立不便,无法独立站立和行走的患者而言,需要一种能够协助患者在家庭、医院或者养老院等场所,方便移位装置,也就是移位机。
3.市场上协助行走不便的患者移位方式有以下两种:第一种采用可移动式小吊车,由护理人员推动的方式;第二种在床周围设置支架和吊车,定向的移位装置将躯体托起或移动到床下。
4.针对第一种需要人力推送,且在人多的场合,如医院、养老院等场所,行走不便,很难控制方向,需要多名医护人员陪同才能完成;第二种占用面积较大,且仅能在床周围活动,还需要轮椅、推车等配套设备,很难将患者移动到浴室、厕所、活动室等场所。鉴于以上原因,设计一种天轨移位机是很有必要的。
5.然而,市面上所有移位机正常运行要求所经过的轨道是在同一水平面内,当房间各个区域存在高度差的时候,就只能以低位区域为基础安装轨道,造成高位区域的空间浪费,同时也影响美观,然后,低位轨道上若是配置康复类移位机,其形成的高度导致无法进行康复行走训练。
技术实现要素:
6.本发明所要解决的技术问题是克服现有技术的不足,提供一种改进的落差消除式移位机。
7.同时还涉及一种移位机的落差消除工艺。
8.为解决以上技术问题,本发明采取如下技术方案:
9.一种落差消除式移位机,其包括轨道、移位装置,轨道包括位于同一空间内且在上下方向存在高度落差、在左右方向隔开设置的上轨本体和下轨本体;位于上轨本体和下轨本体之间的转载轨本体,其中转载轨本体能够自端部与上轨本体或下轨本体对齐拼接形成以消除落差的所述上移位轨道或下移位轨道,移位机还包括用于驱动转载轨本体在上移位轨道和下移位轨道之间运动的落差消除动力器、分别与落差消除动力器和移位装置相连通的控制系统,处于上移位轨道时,上轨本体与转载轨本体之间的缝宽为d1;处于下移位轨道时,下轨本体与转载轨本体之间的缝宽为d2,其中2mm≤d 1=d2≤30mm,且移位装置的移动轮直径至少为d1的10倍。
10.优选地,上轨本体和下轨本体通过倾斜延伸的轨道架固定连接,且左右间隔的垂距为m,上下落差的高度为h,转载轨本体沿着轨道架倾斜方向滑动安装在轨道架上,且转载轨本体长度为l,m-l≥h。
11.根据本发明的一个具体实施和优选方面,转载轨本体在上移位轨道和下移位轨道
之间移动的位移为s,其中s>h。这样才能够在最佳状态下,完成轨道精准地拼装对齐,而且根据高低差和所需要的位移,进而快速实施轨道的位置布局。
12.优选地,m≥1.5l。这样一来,在满足该条件下,使得空间布局更加紧凑。
13.优选地,缝宽2~28mm。这样一来,满足运动衔接的同时,也便于转载轨本体平稳承接,避免移位停顿或卡死。
14.优选地,轨道架包括斜轨、用于将斜轨的上下端部分别与上轨本体和下轨本体固定连接的连接座,转载轨本体通过滑座滑动设置在斜轨上。
15.进一步的,在斜轨上设有沿着自身长度方向延伸的导向滑轨,滑座滑动设置在导向滑轨上,落差消除动力器包括沿着导向滑轨的延伸方向伸缩运动的动力推杆或沿着导向滑轨的延伸方向的传动丝杠。
16.优选地,在导向滑轨的顶部和底部分别形成上限位靠栅和下限位靠栅,其中所述滑座与上限位靠栅或下限位靠栅抵触时,转载轨本体与上轨本体或下轨本体齐平。也就是说,上行和下行的限位,确保行程控制,也便于轨道齐平对接的实施。
17.此外,控制系统包括分别设置在上轨本体、下轨本体、转载轨本体上的位置传感器、与传感器相连通的控制器,其中控制器还与落差消除动力器连通。在控制器的控制下进一步改善移位装置移位和上下消除高低差运动的安全。
18.具体的,上轨本体和下轨本体上的位置传感器均包括接触开关、限位开关,转载轨本体上的位置传感器包括对中检测开关、安全锁定开关。
19.根据本发明的一个具体实施和优选方面,处于上移位轨道或下移位轨道时,控制系统与落差消除动力器形成自锁电路;转载轨本体处于移动时,控制系统与移位装置形成自锁电路。这样一来,能够在移位装置移动过程中确保落差消除动力器或者移位装置自身处于相对锁定状态,避免安全事故的发生。
20.优选地,落差消除动力器包括设置在天花板上的固定架、位于固定架下方的动力架、设置在固定架和动力架之间且上下延伸的动力伸缩杆,其中转载轨本体固定在动力架的底部,且随着动力伸缩杆的伸缩而同步升降。
21.优选地,在固定架和动力架之间还设有导向伸缩杆,其中导向伸缩杆随着动力伸缩杆运动而同步伸缩。在导向伸缩杆的进一步导向下,提高转载轨本体在升降过程中的稳定性。
22.进一步的,导向伸缩杆有四根,且以动力伸缩杆为中心呈矩形阵列分布在动力伸缩杆的周向上。此时,所提供的导向限位效果是最佳的,因此,移位装置在上下升降过程中相对平稳。
23.控制系统包括分别设置在所述下轨本体、上轨本体、转载轨本体上的对位传感器;对中传感器,其中形成下移位轨道时,所述下轨本体和所述转载轨本体的对位传感器对齐形成自锁电路;形成上移位轨道时,所述上轨本体和所述转载轨本体的对位传感器对齐形成自锁电路,所述对中传感器位于所述转载轨本体的中部,且所述移位装置的中部设置与所述对中传感器相配合的感应器,当所述对中传感器与所述感应器配合时,所述移位装置的移位中心线与所述落差消除动力器运动方向的中心线重合。
24.上轨本体、下轨本体、转载轨本体三者平行设置,所述转载轨本体保持水平状态在所述上移位轨道和下移位轨道之间移动。
25.此外,在天花板分别与下轨本体和上轨本体之间设有低位挂架和高位挂架,其中低位挂架和高位挂架结构相同,均包括呈v的第一挂杆和第二挂杆、分别将第一挂杆和第二挂杆下端部对接且与下轨本体或上轨本体相连接的挂杆接头。
26.具体的,第一挂杆、第二挂杆、及天花板构成闭合的直角三角形,且下轨本体和上轨本体分别设有两个直角三角形进行吊装,同时两个直角三角形在下轨本体或上轨本体的长度方向和宽度方向错位分布。
27.本发明的另一技术方案是:一种移位机的落差消除工艺,其采用的是上述落差消除式移位机,且包括如下步骤:
28.s 1、将转载轨本体在保持水平方向不动的前提下,通过控制系统控制落差消除动力器驱动,以使得转载轨本体向上或向下与对应的所述上轨本体或所述下轨本体对齐且间隔对接;
29.s2、完成转载轨本体对接后,控制系统控制移位装置在上移位轨道或下移位轨道上移动并将移位装置转载至转载轨本体的中部;
30.s3、完成转载轨本体转载后,在控制系统的控制下,落差消除动力器反向驱动形成与s1相反的运动状态,且间隔和齐平对接,移位装置自转载轨本体的中部向对齐的轨本体移出,完成落差位的消除和互换。
31.由于以上技术方案的实施,本发明与现有技术相比具有如下优点:
32.本发明一方面在同一空间内进行轨道的定位和移动的布局,不仅满足低位移动的需要,而且还能够满足高位康复行走训练的需要;另一方面所形成上移位轨道和下移位轨道之间的缝宽设计,不仅不会造成轨道运动的碰撞,而且能够确保移位装置平稳和顺畅的移位,避免移位造成的停顿或卡死现象发生。
附图说明
33.下面结合附图和具体的实施方式对本发明做进一步详细的说明。
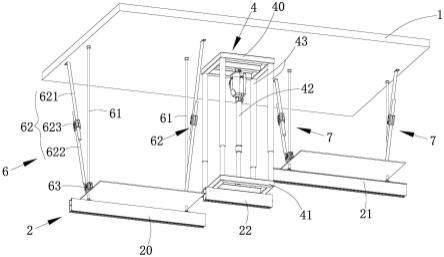
34.图1为实施例1中移位机的结构示意图;
35.图2为图1的主视示意图(处于下移位轨道状态);
36.图3为图1的主视示意图(处于下移位轨道和上移位轨道之间状态);
37.图4为图1的主视示意图(处于上移位轨道状态);
38.图5为实施例2中移位机的结构示意图;
39.图6为实施例2的移位原理简化示意图(1);
40.图7为实施例2的移位原理简化示意图(2);
41.图8为实施例2的移位原理简化和缩小比例后示意图(3);
42.其中:1、天花板;2,e 1、轨道;20,e 11、下轨本体;21,e 10、上轨本体;22,e 12、转载轨本体;e 13、轨道架;130、斜轨;131、连接座;e 14、滑座;e 15、导向滑轨;d,b、下移位轨道;g,a、上移位轨道;f、拼装缝;3, e2、移位装置;4,e3、落差消除动力器;40、固定架;41、动力架;42、动力伸缩杆;43、导向伸缩杆;e30、传动丝杠;e31、上限位靠栅;e32、下限位靠栅;5、控制系统;50、对位传感器;6、低位挂架;61、第一挂杆;62、第二挂杆;621、杆一;622、杆二;623、连接座;63、挂杆接头;7、高位挂架;
①
,
⑥
、接触开关;
②
,
⑦
,
⑧
,
⑨
、限位开关;
③
,
⑤
、安全锁定开关;
④
、对中检测开关。
具体实施方式
43.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施例的限制。
44.实施例1
45.如图1所示,本实施例的移位机,其包括天花板1、轨道2、滑动设置在轨道2上的移位装置3。
46.轨道2包括上下错位的下轨本体20和上轨本体21、转载轨本体22,其中转载轨本体22位于下轨本体20和上轨本体21之间,且能够分别自端部与下轨本体20或上轨本体21齐平对接、以形成下移位轨道d或上移位轨道g。
47.结合图2至图4所示,下轨本体20、上轨本体21、转载轨本体22三者相互平行设置。方便齐平对接的实施。
48.转载轨本体22分别与下轨本体20和上轨本体21之间形成第一间隔缝和第二间隔缝,其中第一间隔缝和第二间隔缝的缝宽相等,移位装置能够平缓自缝宽处滑过。通过缝宽的设置,满足运动衔接的同时,也便于转载轨本体平稳承接,避免移位停顿或卡死。
49.本例中,缝宽为2mm。此时,移位装置3(移动轮)形成的过渡振动最小。
50.同时,为了实现下移位轨道d或上移位轨道g,本例中,高低差轨道移位机还包括用于驱动转载轨本体22在下移位轨道d和上移位轨道g之间且上下垂直升降运动的落差消除动力器4、以及分别与落差消除动力器和移位装置相连通的控制系统5。
51.落差消除动力器4包括设置在天花板1上的固定架40、位于固定架40下方的动力架41、设置在固定架40和动力架41之间且上下延伸的动力伸缩杆42,其中转载轨本体22固定在动力架41的底部,且随着动力伸缩杆42的伸缩而同步升降。在动力伸缩杆的伸缩运动中稳定实施转载轨本体的落差消除。
52.在固定架40和动力架41之间还设有四根导向伸缩杆43,其中四根导向伸缩杆43随着动力伸缩杆42运动而同步伸缩。在导向伸缩杆的进一步导向下,提高转载轨本体在升降过程中的稳定性。
53.本例中,四根导向伸缩杆43以动力伸缩杆42为中心,呈矩形阵列分布在动力伸缩杆42的周向上。此时,所提供的导向限位效果是最佳的,因此,移位装置在上下升降过程中相对平稳。
54.控制系统5包括分别设置在下轨本体20、上轨本体21、转载轨本体22上的对位传感器50;对中传感器,其中对中传感器位于转载轨本体22的中部,且移位装置3的中部设置与对中传感器相配合的感应器,当对中传感器与感应器配合时,移位装置3的移位中心线与落差消除动力器4运动方向的中心线重合。这样一来,使得移位装置和转载轨本体自中心对齐的前提下进行上下升降,进一步提高移位装置在高低位转换中的安全性。
55.再次参见图2所示,转载轨本体22处于下移位轨道d状态,下轨本体20 和转载轨本体22左右齐平,且对位传感器50也对齐,此时,转载轨本体22与下轨本体20之间的缝宽为2mm,同时控制系统5与落差消除动力器4形成自锁电路(也就是说:落差消除动力器4无法驱使转载轨本体22上下运动),移位装置3能够在下移位轨道d上左右滑动,一旦移位装置3全
部移动至转载轨本体22后,自锁电路解锁,同时再次参见图3所示,移位装置3的移位中心线与落差消除动力器4运动方向的中心线重合,并且在落差消除动力器4的驱动下,转载轨本体22向上直线升起,此时控制系统5与移位装置3之间形成自锁电路 (也就是说:移位装置3无法在转载轨本体22上移动,以避免脱轨),再次参见图4所示,转载轨本体22上升至转载轨本体22上的对位传感器50与上轨本体21上的对位传感器50对齐时,处于上移位轨道g状态,此时,控制系统5 与移位装置3之间的自锁电路解锁,转载轨本体22和上轨本体21之间的缝宽为2mm,同时控制系统5与落差消除动力器4又形成自锁电路(也就是说:落差消除动力器4无法驱使转载轨本体22上下运动),移位装置3能够在上移位轨道g上左右滑动。
56.此外,在天花板1分别与下轨本体20和上轨本体21之间设有低位挂架6 和高位挂架7,其中低位挂架6和高位挂架7结构相同。
57.具体的,低位挂架6包括呈v的第一挂杆61和第二挂杆62、分别将第一挂杆61和第二挂杆62下端部对接且与下轨本体20相连接的挂杆接头63。
58.第一挂杆61、第二挂杆62、及天花板1构成闭合的直角三角形,且下轨本体20和上轨本体21分别设有两个直角三角形进行吊装,同时两个直角三角形在下轨本体20或上轨本体21的长度方向和宽度方向错位分布。
59.同时,第二挂杆62有两根杆上下相对活动连接的杆一621和杆二622,其中杆二622下部自底部转动连接在挂杆接头63上。
60.本例中,杆一621和杆二622之间通过连接座623相连接,并且能够调整第二挂杆62的长短。
61.挂杆接头63穿过吊顶与下轨本体20和上轨本体21连接,且第一挂杆61 的底部能够上下活动调节的连接在挂杆接头63上。
62.因此,在上述的低位挂架6和高位挂架7布局的对接下,能够根据下轨本体20和上轨本体21的长短进行设计不同角度的直角三角形与天花板1的吊装,以改善轨道吊装的稳定性,从而保持轨道的平行。
63.综上,本实施例具有以下优势:
64.1、通过下移位轨道和上移位轨道的形成,能够将高低为轨道布局在同一空间内,同时在落差消除动力器运动下,移位装置能够在高低位互换,不仅能够满足低位移动的需求,而且还能够满足高位康复行走训练的需求。
65.2、在电路自锁和解锁切换的过程中,提高移位装置运动的安全性;同时升降过程中相对平稳,而且在高或低位移位中十分顺畅,也不会出现卡死或瞬间停顿(停顿会造成移位机的牵引绳摆动,增加移位中的风险)。
66.3、在低位挂架和高位挂架布局的对接下,能够根据下轨本体和上轨本体的长短进行设计不同角度的直角三角形与天花板的吊装,以改善轨道吊装的稳定性,从而保持轨道的平行度,实施移位机平稳移位。
67.实施例2
68.如图5所示,本实施例的高度落差斜拉轨道式移位机,其包括轨道1、滑动设置在轨道1上的移位装置2。
69.轨道1包括在上下方向存在高度差、在左右方向隔开设置的上轨本体10和下轨本体11;位于上轨本体10和下轨本体11之间的转载轨本体12。
70.上轨本体10、下轨本体11、转载轨本体12三者平行设置。这样能够准确地实施精准对接。
71.上轨本体10和下轨本体11通过倾斜延伸的轨道架13固定连接,且左右间隔的垂距为m,上下落差的高度为h。
72.转载轨本体12沿着轨道架13倾斜方向滑动安装在轨道架13上,且转载轨本体12长度为l,m-l≥h,其中m≥1.5l。这样一来,在满足该条件下,使得空间布局更加紧凑。
73.移位机还包括设置在轨道架13上的落差消除动力器3,其中转载轨本体12 在落差消除动力器3驱动下,沿着轨道架13上下运动以形成分别与上轨本体10 或下轨本体11齐平消除落差的上移位轨道a或下移位轨道b。
74.转载轨本体12在上移位轨道a和下移位轨道b之间移动的位移为s,其中 s>h。这样才能够在最佳状态下,完成轨道精准地拼装对齐,而且根据高低差和所需要的位移,进而快速实施轨道的位置布局。
75.同时,在形成上移位轨道a或下移位轨道b时,转载轨本体12的端面与对齐的上轨本体10或下轨本体11的端面之间形成拼接缝f,且拼接缝f的缝宽 2mm。这样一来,满足运动衔接的同时,也便于转载轨本体平稳承接,避免移位停顿或卡死。
76.轨道架13包括斜轨130、用于将斜轨130的上下端部分别与上轨本体10和下轨本体11固定连接的连接座131,转载轨本体12通过滑座14滑动设置在斜轨130上。
77.在斜轨130上设有沿着自身长度方向延伸的导向滑轨15,滑座14滑动设置在导向滑轨15上,落差消除动力器3包括沿着导向滑轨15的延伸方向的传动丝杠30(常规设计,在此不对其进行详细阐述也是清楚可实施的)。
78.在导向滑轨15的顶部和底部分别形成上限位靠栅31和下限位靠栅32,其中滑座14与上限位靠栅31或下限位靠栅32抵触时,转载轨本体12与上轨本体10或下轨本体11齐平。也就是说,上行和下行的限位,确保行程控制,也便于轨道齐平对接的实施。
79.具体的,上限位靠栅31和下限位靠栅32分别为限位开关
⑧
和
⑨
,可以是常用的接触开关或者距离传感器。
80.同时,移位机包括分别设置在上轨本体10、下轨本体11、转载轨本体12 上的位置传感器、与传感器相连通的控制器,其中控制器还与落差消除动力器3 连通。在控制器的控制下进一步改善移位装置移位和上下消除高低差运动的安全。
81.具体的,上轨本体10和下轨本体11上的位置传感器(
①
至
⑨
)均包括接触开关、限位开关,转载轨本体12上的位置传感器包括对中检测开关、安全锁定开关。
82.本例中,下轨本体11上的接触开关
①
和限位开关
②
左右布局,上轨本体10 上的限位开关
⑥
和接触开关
⑦
左右布局,转载轨本体12上的安全锁定开关有两个分别为
③
和
⑤
,对中检测开关
④
,其中
③
和
⑤
位于
④
的两侧。
83.再次结合图5可知:
①
、
⑦
为非接触式检测开关,侦测移位装置3进入上下轨本体10、11所在的移动区域;
②
、
⑥
为机械式限位安全装置,防止移位装置3从所在的轨本体的开放端脱轨;
③
、
⑤
为电控式长闭安全装置,防止移位装置3进入轨道本体后脱轨;
⑧
、
⑨
为活动轨道运行区间限制安全装置;
④
为移位装置3进入轨道本体中部区域的检测开关。
84.因此,本实施例的实施过程如下:
85.1、移位装置3经过
①
——触发
③
打开;
86.2、轨道处于低位(下移位轨道b),
②
为打开状态;
87.3、移位装置3进入转载轨本体12——到达
④
位置——触发
③
关闭以及落差消除动力器3可以运行;
88.4、落差消除动力器3工作并带动载轨本体12向上运行;
89.5、转载轨本体12离开下轨本体11,
②
切换为闭合状态;
90.6、转载轨本体12向上运动,
⑨
得到信号,停止运行,此时处于高位轨道 (上移位轨道a),
⑤
和
⑥
由闭合状态变为打开状态
91.7、移位装置3离开转载轨本体12,进入上轨本体10;
92.8、移位装置3经过
⑦
——触发
⑤
闭合复位。
93.同时,结合图2至图4所示,具体结合相应的尺寸进行说明。
94.在图6中,m=800mm,l=500mm,h=300mm;s=424.26mm,斜轨130的长度为 x,x=1131.37mm,斜轨130与水平面的角度为45
°
。
95.在图7中,m=1019.62mm,l=500mm,h=300mm;s=600mm,斜轨130的长度为x,x=1131.37mm,斜轨130与水平面的角度为35
°
。
96.在图8中,m=1619.62mm,l=500mm,h=300mm;s=1159.11,斜轨130的长度为x,x=1676.75mm,斜轨130与水平面的角度为15
°
。
97.综上,本实施例具有以下优势:
98.1、通过上下轨本体上下左右错位布局在同一空间内,转载轨本体运动将上轨本体和下轨本体之间的落差消除并进行齐平拼接,实施上下轨本体之间距离远大于转载轨本体长度中的移位装置的上下位置互换,因此,在同一空间内的合理布局,不仅满足低位移动的需要,而且还能够满足高位康复行走训练的需要;
99.2、在传感器
①
至
⑨
的布局和控制下,大幅度提升移位机的移动和上下移位操作的安全性和自动化性能,尤其是在对中位置进行移动操作以及防止脱轨等手段甚为重要,同时也为实施精准对接提供良好的辅助;
100.3、所形成的拼接缝,不仅满足运动衔接的同时,还要便于转载轨本体平稳承接,避免移位停顿或卡死。
101.综上,实施例1和实施例2中,不管是直拉,还是斜拉,都能够实施轨道的齐平对接,从而实施移位装置的转载消除落差。
102.以移位装置运动为例,简述落差消除过程如下:
103.s 1、将转载轨本体在保持水平方向不动的前提下,通过控制系统控制落差消除动力器驱动,以使得转载轨本体向上与所述上轨本体对齐且间隔对接;
104.s2、完成转载轨本体对接后,控制系统控制移位装置在上移位轨道或下移位轨道上移动并将移位装置转载至转载轨本体的中部;
105.s3、完成转载轨本体转载后,在控制系统的控制下,落差消除动力器反向驱动形成与s1相反的运动状态,且间隔和齐平对接,移位装置自转载轨本体的中部向对齐的轨本体移出,完成落差位的消除和互换。
106.以上对本发明做了详尽的描述,但本发明不限于上述的实施例。凡根据本发明的精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1