一种骨外科关节置换手术辅助设备的制作方法
1.本发明涉及医疗器械技术领域,特别涉及一种骨外科关节置换手术辅助设备。
背景技术:
2.腿部膝关节是下肢重要的负重关节,其结构和功能是人体关节中最复杂者。膝关节退行性骨关节病是老年人的常见疾病,据报道50岁以上存在症状的膝关节骨关节病男性发病率35%,女性高达74%。严重膝关节骨关节病需要进行人工膝关节置换术的患者越来越多。膝关节置换术可解除膝关节疼痛,改善膝关节功能,纠正膝关节畸形和获得长期稳定。
3.膝关节置换手术步骤如下:
4.步骤一、暴露膝关节:自髌骨上方6-10cm,向下至胫骨结节下1-2cm处,做一正中纵行切口;然后切开、剥离周围组织,暴露膝关节;
5.步骤二、去除受损膝关节:使用器械在股骨下端做定位钻孔,并截去受损骨头进行测量;然后在胫骨上端钻孔,测量型号,并截去受损骨头进行测量;
6.步骤三、安装截骨板截骨:利用器械测量人工关节所需型号;然后在股骨下端定位钻孔,安装截骨板;再进行截骨;
7.步骤四、试模:在胫骨上端安装胫骨垫;再在股骨下端安装股骨垫;然后安装半月板和髌骨假体,进行试模;
8.步骤五、置入人工膝关节:试模合适后取出模型,选择合适的人工膝关节再将其组件依次置入;
9.步骤六、缝合切口:关节置换完成后,依次缝合皮下组织和皮肤,手术结束。
10.目前,骨外科在进行膝关节置换手术时需要用到多个辅助器械,并通过这些辅助器械的默契配合来高质量完成膝关节的置换;然而,经市场调研和技术检索发现,当下的膝关节置换手术用辅助器械多为单一机构或仅具备某一种辅助功能,如市场上单一销售的膝关节固定装置、组织拨离撑开装置、钻孔辅助装置等关键辅助器械,手术过程中则需要将这些辅助器械组合起来进行使用,常常会出现各辅助器械之间配合不到位、使用过程繁琐等问题;
11.更为重要的是,膝关节置换是一项精准度要求较高的手术,手术前需要在手术台上对各个辅助器械进行精细安装调整,以保证手术过程中无意外发生,而在实际操作中,上述各个辅助器械的安装调整常常需要花费大量的时间,导致手术效率低下,这也是目前各大医院采用多位医生协助而非辅助器械的主要原因所在。
12.综上所述,发明一种一体化、高配合度的骨外科关节置换手术辅助设备成为当务之急。
技术实现要素:
13.针对上述问题,本发明提出一种骨外科关节置换手术辅助设备,所使用的技术方
案是:
14.一种骨外科关节置换手术辅助设备,其特征在于,包括机架,所述机架通过支腿固定安装在手术台上对应腿部的位置;所述机架上设有膝盖支撑固定机构、撑开保持机构、操作辅助机构,且所述撑开保持机构和操作辅助机构位于膝盖支撑固定机构上方;
15.所述机架还包括底部支撑梁和竖向支撑架,所述竖向支撑架固定安装在底部支撑梁的两侧,所述支腿固定安装在底部支撑梁或竖向支撑架上;
16.所述膝盖支撑固定机构包括支撑板、大腿托板、小腿托板、滑动板和弯曲调节机构;所述支撑板固定安装在底部支撑梁上,且前侧设有用于安装小腿托板和弯曲调节机构的避空;所述大腿托板与支撑板呈一定倾斜角度固定连接,且上表面设有用于固定大腿的绑带;所述小腿托板通过弯曲调节机构与大腿托板相对转动连接;所述滑动板滑动设置在小腿托板上,且上表面设有用于固定小腿的绑带;
17.所述撑开保持机构通过支撑横梁水平滑动安装在两个竖向支撑架之间,包括升降架、支撑滑架和撑开拨片;所述支撑滑架对称滑动设置在所述升降架上,且每个支撑滑架上滑动安装有至少一个撑开拨片;所述升降架竖直滑动安装在撑开保持机构上,用于带动支撑滑架和撑开拨片升降;
18.所述操作辅助机构包括升降机构、水平滑动机构、翻转机构和辅助机头,所述升降机构上下滑动安装在两个竖向支撑架上;两个所述水平滑动机构对称并水平滑动安装在升降机构上;所述翻转机构转动安装在两个水平滑动机构之间;所述辅助机头水平滑动安装在翻转机构上,且前侧设有用于固定手术用工具的连接卡板;
19.所述骨外科关节置换手术辅助设备还包括遥控手柄,所述遥控手柄用于控制整台骨外科关节置换手术辅助设备的运行。
20.优选地,所述膝盖支撑固定机构还包括导向板,所述导向板为两块,对称安装在小腿托板、滑动板和弯曲调节机构的两侧,且与支撑板和/或底部支撑梁固定连接;两块所述导向板上各对应设有至少一条弧形滑道,所述小腿托板通过两侧设置的销轴滑动安装在弧形滑道上。
21.优选地,所述弯曲调节机构包括弧形滑轨、驱动电机一、啮合齿轮组一和啮合齿轮齿条组;所述弧形滑轨一端固定安装在大腿托板下侧面;所述驱动电机一固定连接在导向板上,且输出轴与啮合齿轮组一中的一个齿轮固定连接;所述啮合齿轮组一的另一个齿轮通过转轴转动连接在导向板上;所述啮合齿轮齿条组中的齿轮同心并固定安装在上述转轴上,齿条形状对应弧形滑轨,并滑动安装在弧形滑轨上;所述啮合齿轮齿条组中的齿条一端与小腿托板下侧面固定连接。
22.优选地,所述撑开保持机构还包括拨动块一、传动杆一、手动拨盘、滑动架、手动拨块和传动杆二;所述滑动架滑动安装在支撑横梁上,且滑动架底部设有止位旋钮,用于将滑动架相对固定在支撑横梁上;所述升降架上下滑动安装在滑动架上;所述升降架和滑动架均在侧面设有滑槽,且滑槽底部均设有连续相接的弧形限位凹槽;所述手动拨块滑动安装在滑动架的滑槽内,并通过底部设置的弧形凸起与对应的弧形限位凹槽配合;所述传动杆二两端分别与手动拨块和升降架转动连接;所述拨动块一对应支撑滑架设置有两个,且滑动安装在升降架的滑槽内,并通过底部设置的弧形凸起与对应的弧形限位凹槽配合;两个所述拨动块一一端与对应的支撑滑架固定连接,另一端各与一个传动杆一转动连接;所述
手动拨盘转动设置在升降架的中间位置,且两侧通过对称设置的转轴与两个传动杆一转动连接。
23.优选地,所述操作辅助机构中的升降机构包括驱动电机二、啮合齿轮组二、丝杠一、皮带轮一、皮带一和竖直滑动架;所述驱动电机二安装在其中一个所述竖向支撑架上,且输出轴与所述啮合齿轮组二的其中一个齿轮固定连接;两个所述丝杠一对应安装在两个竖向支撑架上,且底部均固定安装有皮带轮一,两个带轮一之间通过皮带一连接;所述啮合齿轮组二的另一个齿轮固定安装在其中一个所述丝杠一上,用于在驱动电机二驱动下带动两个丝杠一同步转动;两个所述竖直滑动架对称并滑动安装在两个竖向支撑架上,并各与对应的丝杠一啮合连接。
24.优选地,所述操作辅助机构中的水平滑动机构包括驱动电机三、啮合齿轮组三、皮带轮二、皮带二和水平滑动架;所述驱动电机三固定安装在竖直滑动架外侧,且输出轴与所述啮合齿轮组三的其中一个齿轮固定连接;所述皮带轮二至少设有两个,且均转动安装在竖直滑动架的同一水平线上;所述皮带二套接在各皮带轮二上,并水平绕竖直滑动架转动;所述水平滑动架水平滑动安装在竖直滑动架内侧,并与皮带二固定连接;其中一个所述皮带轮二与啮合齿轮组三的另一个齿轮固定连接,用于在驱动电机三驱动下带动水平滑动架在竖直滑动架上水平滑动。
25.优选地,所述竖向支撑架两侧各竖直固定设有一个滑杆一,所述竖直滑动架两端各与一个滑杆一滑动连接;所述皮带轮二设有三个,其中两个皮带轮二转动设置在竖直滑动架两端,并与对应的滑杆一滑动连接;第三个皮带轮二转动安装在竖直滑动架外侧,并与啮合齿轮组三的另一个齿轮固定连接;第三个所述皮带轮二及啮合齿轮组三的另一个齿轮均与丝杠一同心并相对转动安装。
26.优选地,所述操作辅助机构中的翻转机构包括驱动电机四、啮合齿轮齿圈组、滑杆二、驱动电机五、皮带轮三、皮带三、丝杠二和旋转盘;所述驱动电机四固定安装在其中一个水平滑动机构的水平滑动架上,且输出轴与啮合齿轮齿圈组中的齿轮固定连接;两个所述旋转盘对应转动安装在每个水平滑动机构中水平滑动架的中间位置;所述啮合齿轮齿圈组中的齿圈固定安装在对应的旋转盘上;所述丝杠二两端各转动安装在对应旋转盘的中心位置,且两个所述旋转盘之间至少安装有一个平行于丝杠二的滑杆二;所述辅助机头滑动安装在滑杆二上,并与丝杠二啮合连接;所述驱动电机五固定安装在两个旋转盘之间,且输出轴上固定连接有一个皮带轮三;所述丝杠二一端固定连接有另一个皮带轮三,且两个皮带轮三通过皮带三套设连接。
27.优选地,所述辅助机头包括壳体、啮合齿轮组四、驱动转盘、驱动轴、啮合齿轮组五、驱动电机六和连接卡板;所述壳体滑动安装在滑杆二上,并与丝杠二啮合连接;所述壳体前侧设有用于卡槽,所述连接卡板与卡槽滑动安装;所述驱动转盘转动安装在壳体前侧的中心位置,且内侧与啮合齿轮组五的其中一个齿轮固定连接;所述驱动电机六固定安装在壳体内,且输出轴与啮合齿轮组四的其中一个齿轮固定连接;所述驱动轴转动安装在壳体内,并均与啮合齿轮组四、啮合齿轮组五中的另一个齿轮固定连接;所述连接卡板上对应驱动转盘转动安装有随动转盘,所述随动转盘与手术用工具可拆卸连接;所述驱动转盘上设有条形限位块,随动转盘内侧面对应设有与条形限位块匹配的条形限位槽。
28.优选地,两个所述竖向支撑架之间还固定设有若干个工具备用挂架。
29.由于本发明采用了上述技术方案,本发明具有以下优点:
30.1.本发明通过膝盖支撑固定机构、撑开保持机构和操作辅助机构的一体化配合设计,不仅能够有效提高各个辅助器械之间的配合度,节省各个辅助器械的安装调试时间,而且可以有效节省人力,提高手术精准度和操作效率。
31.2.本发明的膝盖支撑固定机构通过弯曲调节机构进行小腿与大腿之间的角度调整,并通过导向板进行导向,在保证对小腿与大腿之间角度精准调整的同时有效保证了该机构的长时使用。
32.3.本发明的撑开保持机构通过手动拨盘和手动拨块即可实现对切口两侧皮肤及组织的撑开调节,不仅操作方便,而且结构简单可靠,并对医生操作造成的影响小。
33.4.本发明的操作辅助机构通过升降机构、水平滑动机构、翻转机构和辅助机头的配合设计,有效实现了对手术过程中需要进行钻孔、截骨、定位等对应工具的运用,不仅有效节省了人力,而且提高了手术精准度和操作效率。
附图说明
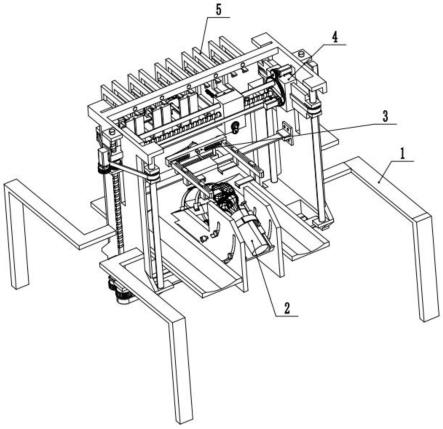
34.图1-3为本发明的整体结构示意图。
35.图4为本发明机架与工具备用挂架的装配结构示意图。
36.图5-6为本发明膝盖支撑固定机构的结构示意图。
37.图7-8为本发明撑开保持机构的结构示意图。
38.图9-11为本发明操作辅助机构的结构示意图。
39.图12为本发明图11中a处的局部放大结构示意图。
40.图13为本发明机架与操作辅助机构、工具备用挂架的装配结构示意图。
41.图14-16为本发明操作辅助机构中辅助机头的结构示意图。
42.图17为本发明实施例中准备进行股骨钻孔操作的结构示意图。
43.附图标号:
44.1-机架;101-支腿;102-底部支撑梁;103-竖向支撑架;104-滑杆一;
45.2-膝盖支撑固定机构;201-支撑板;202-导向板;203-大腿托板;204-弧形滑轨;205-驱动电机一;206-啮合齿轮组一;207-小腿托板;208-滑动板;209-啮合齿轮齿条组;
46.3-撑开保持机构;301-升降架;302-支撑滑架;303-撑开拨片;304-拨动块一;305-传动杆一;306-手动拨盘;307-滑动架;308-手动拨块;309-传动杆二;3010-支撑横梁;
47.4-操作辅助机构;401-驱动电机二;402-啮合齿轮组二;403-丝杠一;404-皮带轮一;405-皮带一;406-竖直滑动架;407-驱动电机三;408-啮合齿轮组三;409-皮带轮二;4010-皮带二;4011-水平滑动架;4012-驱动电机四;4013-啮合齿轮齿圈组;4014-滑杆二;4015-辅助机头;4016-驱动电机五;4017-皮带轮三;4018-皮带三;4019-丝杠二;4020-旋转盘;4015a-壳体;4015b-啮合齿轮组四;4015c-驱动转盘;4015d-驱动轴;4015e-啮合齿轮组五;4015f-驱动电机六;
48.5-工具备用挂架。
具体实施方式
49.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面
的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员能够在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
50.在本发明的描述中,需要说明的是,术语“上”、“下”、“进”、“出”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
51.实施例:
52.如图1-17所示,一种骨外科关节置换手术辅助设备,包括机架1,机架1通过支腿101固定安装在手术台上对应腿部的位置;机架1上设有膝盖支撑固定机构2、撑开保持机构3、操作辅助机构4,且撑开保持机构3和操作辅助机构4位于膝盖支撑固定机构2上方;
53.机架1还包括底部支撑梁102和竖向支撑架103,竖向支撑架103固定安装在底部支撑梁102的两侧,支腿101设有四个,并对称固定安装在两个竖向支撑架103外侧;
54.膝盖支撑固定机构2包括支撑板201、大腿托板203、小腿托板207、滑动板208和弯曲调节机构;支撑板201固定安装在底部支撑梁102上,且前侧设有用于安装小腿托板207和弯曲调节机构的避空;大腿托板203与支撑板201呈20
°‑
40
°
固定连接,且上表面设有两根用于固定大腿的绑带;小腿托板207通过弯曲调节机构与大腿托板203相对转动连接;滑动板208滑动设置在小腿托板207上,且上表面设有两根用于固定小腿的绑带;
55.为了便于本实施例骨外科关节置换手术辅助设备与手术台更好地配合,支撑板201远离避空的一侧延长至竖向支撑架103外20-30cm;与此同时,为了便于患者不进行手术的一条腿能够更舒服,支撑板201上表面的两侧各设有一个与患者腿部平行的条形凹槽,患者在手术中将不进行手术的一条腿放在条形凹槽内;
56.撑开保持机构3通过支撑横梁3010水平滑动安装在两个竖向支撑架103之间,包括升降架301、支撑滑架302和撑开拨片303;支撑滑架302对称滑动设置在所述升降架301上,且每个支撑滑架302上滑动安装有两个撑开拨片303;升降架301竖直滑动安装在撑开保持机构3上,用于带动支撑滑架302和撑开拨片303升降;
57.操作辅助机构4包括升降机构、水平滑动机构、翻转机构和辅助机头4015,升降机构上下滑动安装在两个竖向支撑架103上;两个水平滑动机构对称并水平滑动安装在升降机构上;翻转机构转动安装在两个水平滑动机构之间;辅助机头4015水平滑动安装在翻转机构上,且前侧设有用于固定手术用工具的连接卡板4015g;
58.骨外科关节置换手术辅助设备还包括遥控手柄,遥控手柄用于控制整台骨外科关节置换手术辅助设备的运行。
59.作为本实施例的一个具体实施方式,如图5所示,为了保证小腿托板207能够无侧摆工作,膝盖支撑固定机构2还包括导向板202,导向板202为两块,对称安装在小腿托板207、滑动板208和弯曲调节机构的两侧,且与底部支撑梁102固定套设连接;两块导向板202上各对应设有至两条弧形滑道,小腿托板207通过两侧设置的销轴滑动安装在相应弧形滑道上。
60.作为本实施例的一个具体实施方式,如图6所示,弯曲调节机构包括弧形滑轨204、驱动电机一205、啮合齿轮组一206和啮合齿轮齿条组209;弧形滑轨204一端固定安装在大
腿托板203下侧面;驱动电机一205为伺服电机,固定连接在导向板202上,且输出轴与啮合齿轮组一206中的一个齿轮固定连接;啮合齿轮组一206的另一个齿轮通过转轴转动连接在导向板202上;啮合齿轮齿条组209中的齿轮同心并固定安装在上述转轴上,齿条形状对应弧形滑轨204,并滑动安装在弧形滑轨204上;啮合齿轮齿条组209中的齿条一端与小腿托板207下侧面固定连接;工作时,起动驱动电机一205,小腿托板207在啮合齿轮组一206和啮合齿轮齿条组209带动下与大腿托板203呈90-120
°
角,然后将患者需要手术的一条腿的大腿和小腿分别放在大腿托板203和滑动板208上,并系好绷带,由此完成对腿部的固定;手术过程中,在驱动电机一205带动下,小腿通过小腿托板207和滑动板208相对于大腿进行摆动,以便于手术的进行。
61.作为本实施例的一个具体实施方式,如图7-8所示,撑开保持机构3还包括拨动块一304、传动杆一305、手动拨盘306、滑动架307、手动拨块308和传动杆二309;滑动架307滑动安装在支撑横梁3010上,且滑动架307底部设有止位旋钮,用于将滑动架307相对固定在支撑横梁3010上;升降架301通过两根滑动导向杆上下滑动安装在滑动架307上;升降架301和滑动架307均在侧面设有滑槽,且滑槽底部均设有连续相接的弧形限位凹槽;手动拨块308滑动安装在滑动架307的滑槽内,并通过底部设置的弧形凸起与对应的弧形限位凹槽配合;传动杆二309两端分别与手动拨块308和升降架301转动连接;拨动块一304对应支撑滑架302设置有两个,且滑动安装在升降架301的滑槽内,并通过底部设置的弧形凸起与对应的弧形限位凹槽配合;两个拨动块一304一端与对应的支撑滑架302固定连接,另一端各与一个传动杆一305转动连接;手动拨盘306转动设置在升降架301的中间位置,且两侧通过对称设置的转轴与两个传动杆一305转动连接;工作时,医生先手动将滑动架307移动至膝盖支撑固定机构2上方,并通过止位旋钮进行固定;而后手动调节手动拨盘306,使两个支撑滑架302相对靠近至最小距离;调节完成后,手动将手动拨块308沿滑动架307滑槽向一侧调节,使撑开拨片303在升降架301带动下降低至已切开皮肤及组织的膝盖上方;而后调节两支撑滑架302上撑开拨片303的位置,使两两撑开拨片303对准切口的两侧,于此同时,继续手动调节手动拨块308,使撑开拨片303进入手术切口;此时,两只手一只手手动调节手动拨盘306使撑开拨片303撑开切口两侧的皮肤及组织,另一只手同时手动微调手动拨块308使撑开拨片303在撑开过程中沿膝关节向下深入,最终暴露膝关节。
62.作为本实施例的一个具体实施方式,如图9-13所示,操作辅助机构4中的升降机构包括驱动电机二401、啮合齿轮组二402、丝杠一403、皮带轮一404、皮带一405和竖直滑动架406;驱动电机二401安装在其中一个竖向支撑架103下侧,且输出轴与啮合齿轮组二402的其中一个齿轮固定连接;驱动电机二401为伺服电机;两个丝杠一403对应安装在两个竖向支撑架103上,且底部均固定安装有皮带轮一404,两个带轮一404之间通过皮带一405连接;啮合齿轮组二402的另一个齿轮固定安装在其中一个丝杠一403上,用于在驱动电机二401驱动下带动两个丝杠一403同步转动;两个竖直滑动架406对称并滑动安装在两个竖向支撑架103上,并各与对应的丝杠一403啮合连接;工作时,起动驱动电机二401,两个丝杠一403在啮合齿轮组二402和皮带轮一404、皮带一405配合下同步转动,进而带动两个竖直滑动架406同步升降
63.操作辅助机构4中的水平滑动机构包括驱动电机三407、啮合齿轮组三408、皮带轮二409、皮带二4010和水平滑动架4011;驱动电机三407固定安装在竖直滑动架406外侧,且
输出轴与啮合齿轮组三408的其中一个齿轮固定连接;驱动电机三407为伺服电机;竖向支撑架103两侧各竖直固定设有一个滑杆一104,竖直滑动架406两端各与一个滑杆一104滑动连接;皮带轮二409设有三个,且均转动安装在竖直滑动架406的同一水平线上,其中两个皮带轮二409转动设置在竖直滑动架406两端,并与对应的滑杆一104滑动连接;第三个皮带轮二409转动安装在竖直滑动架406外侧,并与啮合齿轮组三408的另一个齿轮固定连接;第三个皮带轮二409及啮合齿轮组三408的另一个齿轮均与丝杠一403同心并相对转动安装所述皮带二4010套接在各皮带轮二409上,并水平绕竖直滑动架406转动;水平滑动架4011水平滑动安装在竖直滑动架406内侧,并与皮带二4010固定连接;工作时,起动驱动电机三407,第三个皮带轮二409在啮合齿轮组三408带动下转动,皮带二4010在皮带轮二409带动下进而带动水平滑动架4011沿竖直滑动架406水平滑动。
64.操作辅助机构4中的翻转机构包括驱动电机四4012、啮合齿轮齿圈组4013、滑杆二4014、驱动电机五4016、皮带轮三4017、皮带三4018、丝杠二4019和旋转盘4020;驱动电机四4012固定安装在其中一个水平滑动机构的水平滑动架4011上,且输出轴与啮合齿轮齿圈组4013中的齿轮固定连接;两个旋转盘4020对应转动安装在每个水平滑动机构中水平滑动架4011的中间位置;啮合齿轮齿圈组4013中的齿圈固定安装在对应的旋转盘4020上;丝杠二4019两端各转动安装在对应旋转盘4020的中心位置,且两个旋转盘4020之间安装有两个平行于丝杠二4019的滑杆二4014;辅助机头4015滑动安装在滑杆二4014上,并与丝杠二4019啮合连接;驱动电机五4016固定安装在两个旋转盘4020之间,且输出轴上固定连接有一个皮带轮三4017;丝杠二4019一端固定连接有另一个皮带轮三4017,且两个皮带轮三4017通过皮带三4018套设连接;驱动电机四4012、驱动电机五4016均为伺服电机;工作时,起动驱动电机四4012,两旋转盘4020及滑杆二4014、辅助机头4015、驱动电机五4016和丝杠二4019在啮合齿轮齿圈组4013带动下旋转;于此同时,辅助机头4015在驱动电机五4016驱动下,通过皮带轮三4017、皮带三4018、丝杠二4019沿滑杆二4014水平移动,直至将手术用工具对准手术部位。
65.作为本实施例的一个具体实施方式,如图14-15所示,辅助机头4015包括壳体4015a、啮合齿轮组四4015b、驱动转盘4015c、驱动轴4015d、啮合齿轮组五4015e、驱动电机六4015f和连接卡板4015g;壳体4015a滑动安装在滑杆二4014上,并与丝杠二4019啮合连接;壳体4015a前侧设有用于卡槽,连接卡板4015g与卡槽滑动安装;驱动转盘4015c转动安装在壳体4015a前侧的中心位置,且内侧与啮合齿轮组五4015e的其中一个齿轮固定连接;驱动电机六4015f固定安装在壳体4015a内,且输出轴与啮合齿轮组四4015b的其中一个齿轮固定连接,驱动电机六4015f为伺服电机;驱动轴4015d转动安装在壳体4015a内,并均与啮合齿轮组四4015b、啮合齿轮组五4015e中的另一个齿轮固定连接;连接卡板4015g上对应驱动转盘4015c转动安装有随动转盘;为了便于需要被驱动的手术用工具(如股骨开髓钻的转动、开骨髓定位器的角度调整等)与随动转盘开拆卸连接,如图16所示,随动转盘外侧面设有与手术用工具连接的带阻尼插孔或插槽,其中股骨开髓钻等钻具与带阻尼插槽连接,开骨髓定位器等仅需要旋转调整角度的工具通过两根插杆与带阻尼插孔连接;为了便于随动转盘与驱动转盘4015c快速连接,驱动转盘4015c上设有条形限位块,随动转盘上对应设有与条形限位块匹配的条形限位槽;工作时,手术前,根据预先对患者膝盖部位尺寸的评估,将手术中可能用到的工具(如钻头、截骨试模取出器)按评估尺寸范围大小各个对应安
装在每个连接卡板4015g的随动转盘上,由此完成手术用工具的准备;手术过程中,根据手术步骤将对应工具通过连接卡板4015g安装到壳体4015a上,且随动转盘中的条形限位槽同时与驱动转盘4015c上的条状限位块连接,完成手术工具的安装;而后起动驱动电机六4015f,驱动转盘4015c在啮合齿轮组四4015b和啮合齿轮组五4015e带动下旋转,进而带动手术用工具的旋转。
66.为了方便手术用工具的挂置,两个竖向支撑架103之间还固定设有若干个工具备用挂架5。
67.作为本实施例的一个具体实施方式,遥控手柄上设有控制器、存储模块、人机交互显示屏、信息传输模块、小腿上下摆动按键、机头升降按键、机头前后移动按键、机头左右移动按键、机头摆动按键、手术工具旋转起动按键和手术工具旋转微调按键,控制器与遥控手柄上的存储模块、人机交互显示屏、信息传输模块及各个按键电性连接,同时与驱动电机一205、驱动电机二401、驱动电机三407、驱动电机四4012、驱动电机五4016和驱动电机六4015f电性连接;其中,控制器用于控制整个骨外科关节置换手术辅助设备的运行;人机交互显示屏用于配合手动按键设定相关数值,设定手术工具一键执行、一键复位,显示驱动电机一205、驱动电机二401、驱动电机三407、驱动电机四4012、驱动电机五4016所带动相应机构行进的角度或位移以及显示驱动电机六4015f带动手术用工具微调旋转的角度;信息传输模用于控制器与驱动电机一205、驱动电机二401、驱动电机三407、驱动电机四4012、驱动电机五4016和驱动电机六4015f之间的信息传输;存储模块用于存储整个骨外科关节置换手术辅助设备的运行信息数据。
68.本实施例在膝关节置换手术中的使用步骤如下:
69.第一步,将骨外科关节置换手术辅助设备的支撑板201与手术台连接,患者躺下后将待手术的一条腿的大腿和小腿分别放在大腿托板203和滑动板208上,并系好绷带,完成腿部的固定;医生通过遥控手柄上的小腿上下摆动按键对小腿进行调整,并根据人机交互显示屏上显示的小腿摆动角度进行微调,使膝盖处于手术最佳角度;
70.第二步,膝关节对应皮肤及组织切开后,医生手动操作撑开保持机构3,将切口两侧的皮肤及组织撑开,暴露膝关节;
71.第三步,医生通过操作遥控手柄上的机头升降按键、机头前后移动按键、机头左右移动按键、机头摆动按键以及人机交互显示屏,对操作辅助机构4中的升降机构、水平滑动机构、翻转机构以及辅助机头4015的位移进行调整,使辅助机头4015上的手术工具对准待进行相应手术步骤的关节;而后根据工作时间按住人机交互显示屏上的一键执行键将辅助机头4015上的手术工具对相应关节进行靠近贴合、打孔等动作,操作结束后通过机交互显示屏上的一键复位键将辅助机头4015复位,方便医生进行检查和进行下一步;在此过程中,如需对辅助机头4015上的手术工具进行旋转角度的微调,医生则通过手术工具旋转微调按键和人机交互显示屏进行微调;于此同时,在手术过程中,医生根据手术需要通过遥控手柄上的小腿上下摆动按键以及人机交互显示屏对小腿摆动角度进行调整。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1