辅助设备控制方法、装置、辅助设备和存储介质与流程
本申请涉及医疗设备,尤其是涉及一种辅助设备控制方法、装置、辅助设备和存储介质。
背景技术:
1、残疾人作为一种特殊的弱势群体,日常生活中可能存在一些障碍。为了提升残疾人日常生活的质量,目前通过适用于残疾人的护理机器人对残疾人进行日常生活辅助。然而,由于不同用户的情况不同,相关技术中语音控制或脑波控制存在相应的技术问题:采用语音控制的方式可能无法适用于一些无法进行正常表达的用户;采用脑波控制的方式存在难以抽取特征值的缺点。因此,现有的一些设备可能存在适用性不广泛的问题。
技术实现思路
1、本申请的目的在于提供一种辅助设备控制方法、装置、辅助设备和存储介质,可以针对无法表达但是可以进行简单活动的用户,进行相应的活动辅助。
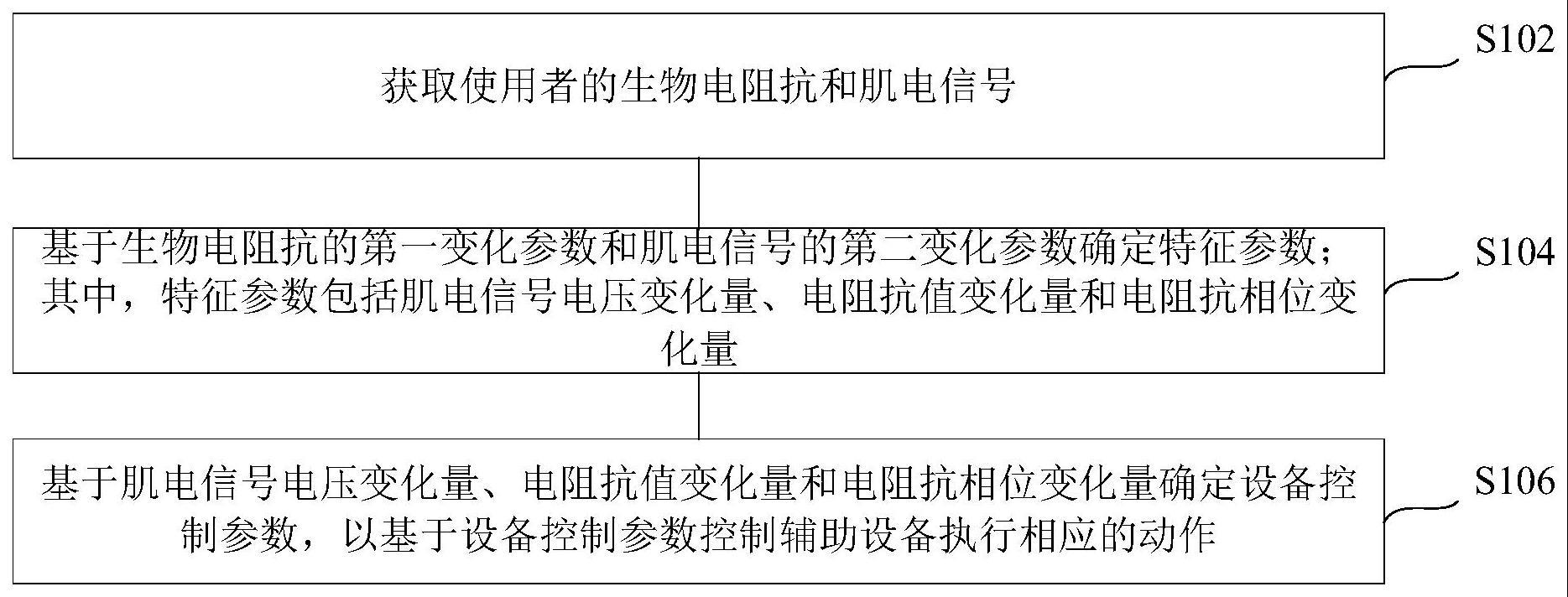
2、第一方面,本发明提供一种辅助设备控制方法,方法应用于辅助设备,方法包括:获取使用者的生物电阻抗和肌电信号;基于生物电阻抗的第一变化参数和肌电信号的第二变化参数确定特征参数;其中,特征参数包括肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量;基于肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,以基于设备控制参数控制辅助设备执行相应的动作。
3、在可选的实施方式中,获取使用者的生物电阻抗和肌电信号,包括:通过辅助设备上设置的电极环获取使用者的生物电阻抗,并通过电极环获取使用者的肌电信号;其中,电极环包括预设个数的采集通道,每个采集通道包括第一预设个数的第一电极片组和第二预设个数的第二电极片组。
4、在可选的实施方式中,获取使用者的生物电阻抗和肌电信号,包括:通过辅助设备上设置的电极环获取使用者的生物电阻抗,并判断是否检测到生物电阻抗的第一变化参数;如果是,通过辅助设备上设置的电极环获取使用者的肌电信号。
5、在可选的实施方式中,基于生物电阻抗的第一变化参数和肌电信号的第二变化参数确定特征参数,包括:对第一变化参数进行特征提取,确定生物电阻抗对应的电阻抗值变化量和电阻抗相位变化量;对第二变化参数进行特征提取,确定肌电信号电压变化量。
6、在可选的实施方式中,基于肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,包括:判断电阻抗值变化量和电阻抗相位变化量是否满足预设的排列组合;如果是,基于排列组合所属的排列组合范围确定第一控制姿态类别;其中,控制姿态类别用于表征辅助设备执行动作的类别;判断肌电信号的第二变化参数是否满足预设的变化区间;如果是,则基于变化区间所属的变化区间范围确定第一控制姿态类别下的第二控制姿态类别;基于第二控制姿态类别确定设备控制参数。
7、在可选的实施方式中,方法还包括:预先配置肌肉运动与设备控制参数之间的匹配关系;其中,肌肉运动为预先训练使用者所产生的肌肉运动,肌肉运动的类型包括预先配置的多种固定种类。
8、在可选的实施方式中,基于肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,包括:基于肌电信号电压变化量、电阻抗值变化量、电阻抗相位变化量以及匹配关系确定目标动作部件;基于预设的变化强度阈值确定目标动作部件的动作类型和动作幅度;基于目标动作部件所对应的动作类型和动作幅度确定设备控制参数。
9、第二方面,本发明提供一种辅助设备控制装置,装置应用于辅助设备,装置包括:获取模块,用于获取使用者的生物电阻抗和肌电信号;确定模块,用于基于生物电阻抗的第一变化参数和肌电信号第二的变化参数确定特征参数;其中,特征参数包括肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量;控制模块,用于基于肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,以基于设备控制参数控制辅助设备执行相应的动作。
10、第三方面,本发明提供一种辅助设备,包括处理器和存储器,存储器存储有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现前述实施方式任一项的辅助设备控制方法。
11、第四方面,本发明提供一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现前述实施方式任一项的辅助设备控制方法。
12、本申请提供的辅助设备控制方法、装置、辅助设备和存储介质,该方法在方式实施时,首先获取使用者的生物电阻抗和肌电信号,然后基于生物电阻抗的第一变化参数和肌电信号的第二变化参数确定特征参数,其中,特征参数包括肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量,进而基于肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,以基于设备控制参数控制辅助设备执行相应的动作。上述方式通过获取的使用者的生物电阻抗和肌电信号控制辅助设备执行相应的动作,对于无法正常表达的使用者,可以通过简单训练一些肌肉动作即可完成设备的控制,以便通过辅助设备完成日常生活中的一些动作,从而可以针对无法表达但是可以进行简单活动的用户,进行相应的活动辅助。
技术特征:
1.一种辅助设备控制方法,其特征在于,所述方法应用于辅助设备,所述方法包括:
2.根据权利要求1所述的辅助设备控制方法,其特征在于,获取使用者的生物电阻抗和肌电信号,包括:
3.根据权利要求1或2所述的辅助设备控制方法,其特征在于,获取使用者的生物电阻抗和肌电信号,包括:
4.根据权利要求1所述的辅助设备控制方法,其特征在于,基于所述生物电阻抗的第一变化参数和所述肌电信号的第二变化参数确定特征参数,包括:
5.根据权利要求1或4所述的辅助设备控制方法,其特征在于,基于所述肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,包括:
6.根据权利要求1所述的辅助设备控制方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的辅助设备控制方法,其特征在于,基于所述肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,包括:
8.一种辅助设备控制装置,其特征在于,所述装置应用于辅助设备,所述装置包括:
9.一种辅助设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1至7任一项所述的辅助设备控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现权利要求1至7任一项所述的辅助设备控制方法。
技术总结
本申请提供了一种辅助设备控制方法、装置、辅助设备和存储介质,涉及医疗设备技术领域,该方法包括:获取使用者的生物电阻抗和肌电信号;基于生物电阻抗的第一变化参数和肌电信号的第二变化参数确定特征参数;其中,特征参数包括肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量;基于肌电信号电压变化量、电阻抗值变化量和电阻抗相位变化量确定设备控制参数,以基于设备控制参数控制辅助设备执行相应的动作。本申请可以针对无法表达但是可以进行简单活动的用户,进行相应的活动辅助。
技术研发人员:梁珉尚,姚利俊,康波
受保护的技术使用者:无锡健芯半导体科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!