介入设备的位移估计的制作方法
本发明涉及介入设备的移动的领域。具体地,本发明涉及基于超声图像来估计介入设备在管腔内部的位移的领域。
背景技术:
1、血管内超声(ivus)成像是一种使用超声从血管内对血管进行成像从而从放置在导管的顶端处的超声设备的位置提供360°视图的技术。在每个导管位置处,采集包含血管管腔、血管壁和更远处的一些相邻结构的二维(2d)图像。在血管疾病的情况下,图像还揭示恶性组织(例如钙和血栓)的组成和空间分布。
2、通过在导管拉回期间采集ivus图像的序列,原则上,采集包括病变和通常狭窄区段的血管的3d体积数据集。为了处置受阻的血液流动,医师通常需要测量狭窄的和可能期望的管腔区域、疾病的纵向范围和任何侧分支的位置,以确定待处置的区段的长度。这些测量用于确定适当球囊或适当支架的直径和长度。
3、旋转ivus导管在以下程度上类似于光学相干断层扫描(oct)导管,两者除了机动化换能器旋转之外还都提供机动化拉回的程度。这就是为什么旋转ivus和oct导管使得能够提供病变血管区段的直径和长度两者。
4、然而,相控阵列ivus导管根本不需要任何机动化。事实上,医师普遍更喜欢手动收回导管。不幸的是,他们以未知且通常随时间变化的速度这样做,妨碍了充分的3d评估。
5、医师对手动拉回的偏好以及心脏引起的换能器运动和运动反转的存在引起在拉回方向上的距离信息的丢失。该距离信息对于医师和自动检测和量化算法两者对ivus数据的适当解读是至关重要的。
6、用于估计导管在管腔内部的运动的当前方法期望机动化的恒定拉回速度,并且仅关注导管的心脏引起的运动反转。此外,这些方法还需要在心动时相中分割数据(通过基于ecg的门控或基于图像的门控)并且使用稳定时相作为参考。
7、当前方法还需要大的时间搜索窗口,以便在足够大数量的先前帧内找到正确的“相似”帧;在计算上昂贵的操作。因此,需要一种用于估计导管在管腔内部的运动的改进方法。
技术实现思路
1、本发明由权利要求限定。
2、根据依据本发明的方面的示例,提供了一种用于确定介入设备在管腔内部的位移的系统,所述介入设备包括在所述管腔内部的远侧部分和在所述管腔外部的近侧部分,所述系统包括:
3、处理器,其被配置为:
4、从超声换能器接收一幅或多幅图像,其中,所述图像表示所述管腔;并且
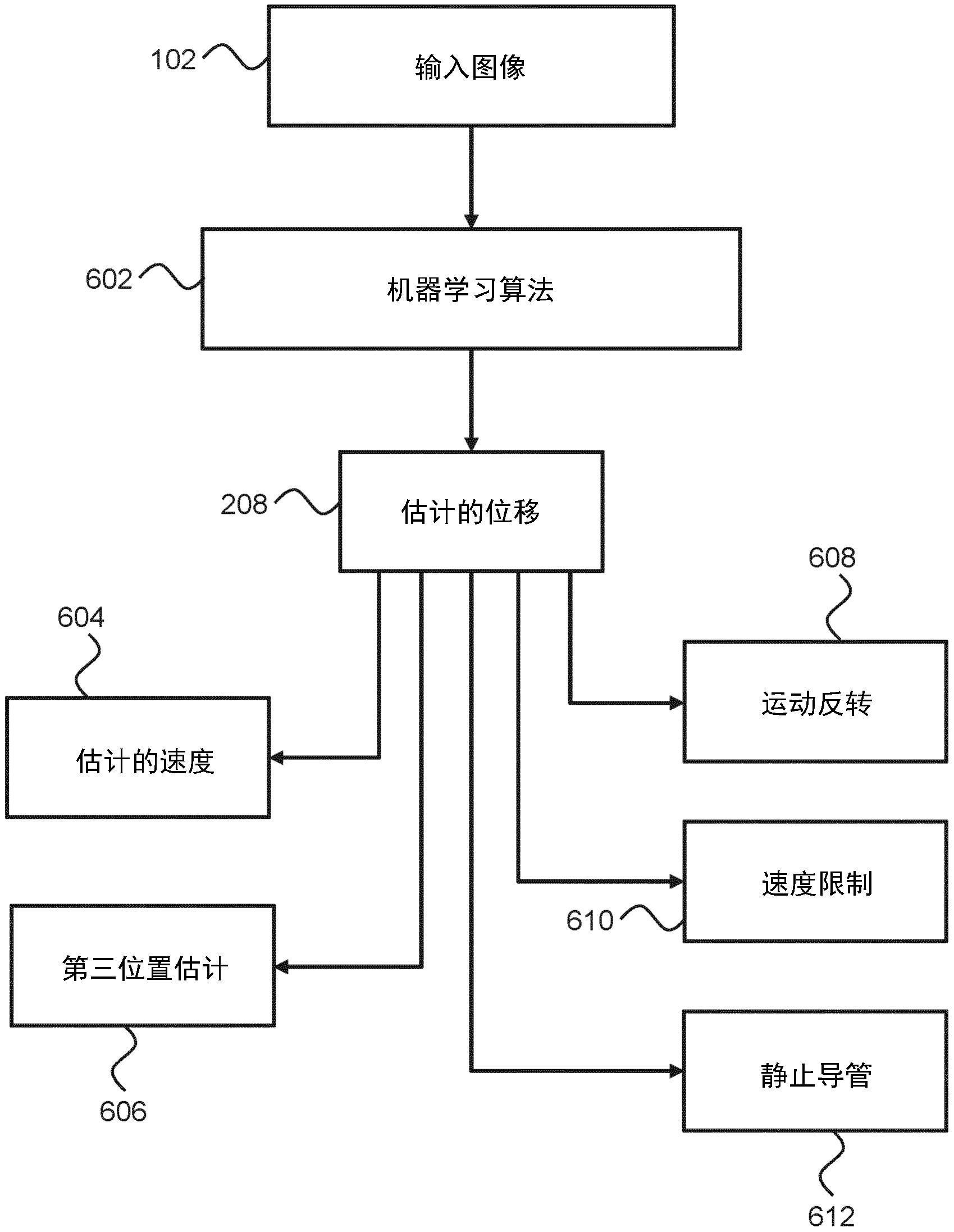
5、将所述一幅或多幅图像输入到机器学习算法中。
6、所述机器学习算法被训练为学习管腔的一幅或多幅图像的内容与介入设备的远侧部分在与超声换能器的成像平面基本上垂直的高程方向上的位移之间的关系。所述机器学习算法因此被训练为确定利用介入设备的远侧部分上的超声换能器采集的管腔的一幅或多幅图像与当已经采集了管腔的那些一幅或多幅图像时介入设备的位移之间的关系。此外,所述机器学习算法被配置为输出针对所述一幅或多幅图像的与所述介入设备的所述远侧部分在所述管腔中的所述运动相对应的一维估计位移。所述介入设备可以是导管、导丝、鞘管或它们的组合中的一种。介入设备也可以被称为管腔内设备或血管内设备,这取决于其被用于的临床应用。在一些实施例中,远侧部分可以是介入设备的远端。在一些实施例中,近侧部分可以是介入设备的近端。
7、对象的运动或移动可以通过其位移来量化,其中,指定位移的幅度和方向。然而,确定对象在3d中的位移需要计算三个变量,这可能是计算密集的并且增加了执行计算所需的时间。在需要实时运动对象的应用中,位移的计算可能是不可行的。
8、发明人已经认识到,对于介入设备在管腔中的运动,介入设备被约束为在一个维度上(即,在血管的纵向方向上,因此在超声成像系统的高程方向上)移动。因此,即使介入设备在典型坐标系(例如笛卡尔坐标系)中不断地改变方向,介入设备也总是相对于管腔在一个方向上行进。
9、仅在一个维度上估计位移的需要简化了估计过程,从而改进了机器学习算法的鲁棒性,并且甚至可以减少/消除复合误差的影响。换句话说,通过机器学习算法简化估计过程可以由于降低的复杂性而改进输出的一维估计位移的准确性和/或精确性。
10、介入设备在管腔中的位移可以通过训练机器学习算法以学习具有内部介入设备的管腔的超声图像与介入设备在管腔中的位移之间的关系来确定。这由于超声图像的“散斑”图案及其相对稳定性而是可能的。散斑图案在三个维度上延伸,并且因此,在连续的超声图像中,它应当是相对稳定的,即,没有随时间的显著变化。
11、然而,如果介入设备的速度变化,则当图像以均匀的时间间隔布置时,散斑图案将被拉伸和压缩。训练机器学习算法被配置为学习图像上的散斑图案与介入设备的远侧部分在由超声换能器提供的超声图像之间的位移之间的关系。
12、由于机器学习算法被配置为输出1d位移值,因此处理器执行机器学习算法所需的计算所需的时间可以显著减少,并且因此可以实时确定介入设备的远侧部分在管腔中的位移。
13、另外,当与具有三个输出(即,3d位移)的算法相比时,由于机器学习算法的简化,机器学习算法将更鲁棒(即,输出的准确性/精确性改进和/或意外输出减少)。
14、超声换能器可以是设置在介入设备的远侧部分处或附近的血管内超声换能器。
15、所述一幅或多幅图像中的每幅图像可以具有对应的采集时间(即时间点),并且所述处理器还可以被配置为基于所估计的位移和所述图像之间的所述采集时间的差异来确定对所述介入设备的远侧部分的所述速度的估计。
16、所述处理器还可以被配置为基于所述一幅或多幅图像和所述介入设备的位移来确定所述介入设备在所述管腔中的位置。
17、例如,两幅图像之间的位移可以用于确定在拍摄每幅图像的时刻介入设备在管腔内的位置。因此,介入设备的位置可以被映射到例如来自外部视图的管腔的模型上。
18、所述机器学习算法还可以被配置为输出运动反转指示,其中,所述运动反转指示指示所述运动在所述管腔内的方向的变化。
19、运动反转可以基于例如输出位移的符号来量化。如果位移为负,则这可以指示介入设备正在向后移动。替代地,机器学习算法可以输出附加变量,其中,“0”指示正常运动,并且“1”指示运动反转。
20、所述机器学习算法可以被配置为从所述一幅或多幅图像被输入到所述机器学习算法中在至多0.2秒内输出所估计的位移。
21、至多0.2秒的时间将允许机器学习算法每秒输出位移估计五次。优选地,机器学习算法可以每秒输出位移估计至少10次。
22、所述处理器还可以被配置为基于所估计的位移是否高于预定值来确定速度限制指示。
23、如果介入设备移动的太快,则血管内超声换能器可能无法拍摄足够的图像用于管腔的准确表示。因此,处理器可以被配置为确定当图像之间的位移高于预定值(例如,0.23mm;在30fps下,导致7mm/s的速度限制)时的速度限制指示。另外,处理器可以被配置为如果介入设备被拉动得太快(例如,如果速度限制指示是“太快”)则警告用户。
24、替代地,所述系统还可以被配置为根据估计位移和从机器学习算法获得估计位移之间的时间来计算估计速度。估计速度的值然后可以用于确定速度限制指示。
25、所述机器学习算法可以基于以下中的一项或多项:
26、全连接神经网络;
27、卷积神经网络;
28、递归神经网络;或
29、基于长短期记忆lstm的神经网络。
30、一幅或多幅图像可以以极坐标方式被输入到机器学习算法中。
31、所述处理器还可以被配置为根据与相继图像或相继(对应)图像区域相对应的多个估计位移来确定中值位移指示。
32、所述处理器还可以被配置为将心脏时相数据输入到所述机器学习算法中,其中,所述心脏时相数据表示对象的心动周期。
33、包括心脏时相数据以确保机器学习算法考虑到由于心动周期引起的管腔的任何变化可以是有益的。
34、该系统还可以包括用于存储所述一幅或多幅图像和/或存储一个或多个估计位移的存储器缓存。
35、本发明还提供了一种用于确定介入设备在管腔内部的运动的方法,所述介入设备包括在所述管腔内部的远侧部分和在所述管腔外部的近侧部分,其中,所述介入设备包括在所述介入设备的所述远侧部分处或附近的血管内超声换能器,所述方法包括:
36、从血管内超声换能器接收一幅或多幅图像,其中,所述图像表示在内部具有所述介入设备的所述管腔;并且
37、将所述一幅或多幅图像输入到机器学习算法中。
38、所述机器学习算法被训练为学习管腔的一幅或多幅图像的内容与介入设备的远侧部分在与超声换能器的成像平面基本上垂直的高程方向上的位移之间的关系。所述机器学习算法因此被训练为确定利用介入设备的远侧部分上的超声换能器采集的管腔的一幅或多幅图像与当已经采集了管腔的一幅或多幅图像时介入设备的位移之间的关系。此外,所述机器学习算法被配置为输出针对所述一幅或多幅图像的与所述介入设备的所述远侧部分在所述管腔中的所述运动相对应的一维估计位移。
39、本发明还提供了一种计算机程序代码单元的计算机程序产品,当在具有处理系统的计算设备上运行时,所述计算机程序代码单元使所述处理系统执行用于确定介入设备在管腔内的运动的方法的所有步骤。
40、本发明的这些和其他方面将参考下文描述的(一个或多个)实施例变得显而易见并将参考下文描述的(一个或多个)实施例得以阐述。
- 还没有人留言评论。精彩留言会获得点赞!