医疗成像系统以及相关联的设备和方法与流程
本技术一般而言涉及医疗成像,并且具体地涉及用于生成患者的解剖结构的三维(3d)表示的系统以及相关联的方法和设备。
背景技术:
1、3d解剖模型(诸如计算机断层扫描(ct)体积重建)经常用在图像引导的医疗规程中,以允许医师在三个维度上可视化患者解剖结构并将手术工具准确定位在适当的位置。但是,从规程前图像数据生成的3d模型可能无法准确反映规程时的实际解剖结构。而且,如果模型没有正确地与解剖结构配准,那么医师可能难以或不可能将工具导航到正确的位置,从而损害规程的准确性和有效性。
2、锥形束计算机断层扫描(cbct)已用于生成患者的解剖结构的高分辨率3d体积重建,以便在医疗规程期间进行图像引导。但是,许多医师无法立即使用常规的cbct成像系统,因为这些系统非常昂贵,并且常常保留给专科部门使用。虽然断层合成(也称为有限角度断层扫描)也已用于规程中成像,但这种技术无法为许多规程生成具有足够高分辨率的3d重建。因而,需要改进的医疗成像系统和方法。
技术实现思路
技术特征:
1.一种用于对解剖区域成像的方法,该方法包括:
2.如权利要求1所述的方法,其中x射线成像装置包括移动c形臂装置。
3.如权利要求1或2所述的方法,其中检测器包括图像增强器。
4.如权利要求1至3中的任一项所述的方法,其中x射线成像装置包括可滑动地耦合到成像臂的支撑臂,并且垫片结构定位在成像臂与支撑臂之间的接口处。
5.如权利要求4所述的方法,其中垫片结构被构造为减少成像臂相对于支撑臂的移动。
6.如权利要求4或5所述的方法,其中支撑臂可旋转地耦合到可移动基座,并且支撑臂和成像臂相对于可移动基座被手动旋转以获得2d图像。
7.如权利要求6所述的方法,其中手动旋转是通过在支撑臂与可移动基座之间的接口处或附近施加的力来致动的。
8.如权利要求7所述的方法,其中力被施加到耦合在支撑臂与可移动基座之间的接口处或附近的杠杆结构。
9.如权利要求4至8中的任一项所述的方法,其中垫片结构包括至少一个细长构件,所述至少一个细长构件被构造为至少部分地装配在成像臂与支撑臂之间的接口中。
10.如权利要求9所述的方法,其中垫片结构包括:
11.如权利要求1至10中的任一项所述的方法,其中手动旋转包括螺旋桨旋转。
12.如权利要求1至11中的任一项所述的方法,其中手动旋转包括至少90度的旋转。
13.如权利要求12所述的方法,其中手动旋转包括至少180度的旋转。
14.如权利要求1至13中的任一项所述的方法,其中所述至少一个传感器包括运动传感器并且传感器数据包括成像臂的运动数据。
15.如权利要求14所述的方法,其中运动传感器包括惯性测量单元(imu)。
16.如权利要求14或15所述的方法,还包括基于运动数据确定成像臂的所述多个姿态。
17.如权利要求1至16中的任一项所述的方法,其中所述至少一个传感器包括耦合到检测器的传感器。
18.如权利要求1至17中的任一项所述的方法,其中生成3d表示包括将每个2d图像与成像臂的对应的姿态相关联。
19.如权利要求18所述的方法,其中将每个2d图像与对应的姿态相关联包括识别当获得2d图像时成像臂的姿态。
20.如权利要求1至19中的任一项所述的方法,还包括在生成3d表示之前将一个或多个失真校正参数应用于2d图像中的至少一些2d图像。
21.如权利要求1至20中的任一项所述的方法,还包括在生成3d表示之前将一个或多个几何校准参数应用于2d图像中的至少一些2d图像。
22.如权利要求1至21中的任一项所述的方法,还包括在手动旋转期间向操作者输出实时反馈以调整成像臂的旋转速度。
23.如权利要求1至22中的任一项所述的方法,还包括在解剖区域中执行的医疗规程期间在图形用户界面上输出3d表示。
24.一种用于对解剖区域成像的系统,该系统包括:
25.如权利要求24所述的系统,其中x射线成像装置包括移动c形臂装置。
26.如权利要求24或25所述的系统,其中x射线成像装置包括可滑动地耦合到成像臂的支撑臂,并且垫片结构被构造为定位在成像臂与支撑臂之间的接口处。
27.如权利要求26所述的系统,其中垫片结构被构造为减少成像臂相对于支撑臂的移动。
28.如权利要求27所述的系统,其中垫片结构抑制成像臂的轨道旋转。
29.如权利要求26至28中的任一项所述的系统,其中支撑臂可旋转地耦合到可移动基座,并且支撑臂和成像臂相对于可移动基座被手动旋转以获得2d图像。
30.如权利要求29所述的系统,还包括耦合在支撑臂与可移动基座之间的接口处或附近的杠杆结构,其中杠杆结构被构造为促进成像臂的手动旋转。
31.如权利要求26至30中的任一项所述的系统,其中垫片结构包括至少一个细长构件,所述至少一个细长构件被构造为至少部分地装配在成像臂与支撑臂之间的接口中。
32.如权利要求31所述的系统,其中垫片结构包括定位在成像臂与支撑臂之间的接口的两侧的一对臂区域。
33.如权利要求32所述的系统,其中垫片结构包括连接所述一对臂区域的桥区域。
34.如权利要求24至33中的任一项所述的系统,其中手动旋转包括角度旋转。
35.如权利要求24至34中的任一项所述的系统,其中手动旋转包括至少90度的旋转。
36.如权利要求24至35中的任一项所述的系统,其中所述至少一个传感器包括运动传感器并且传感器数据包括成像臂的运动数据。
37.如权利要求36所述的系统,其中运动传感器包括惯性测量单元(imu)。
38.如权利要求36或37所述的系统,其中运动传感器耦合到检测器。
39.如权利要求38所述的系统,其中运动传感器经由附接设备耦合到检测器。
40.如权利要求39所述的系统,其中附接设备包括夹子、支架、框架或容器。
41.如权利要求24至40中的任一项所述的系统,还包括可操作地耦合到所述至少一个传感器的控制器,其中控制器被配置为使2d图像与由所述至少一个传感器生成的传感器数据在时间上同步。
42.如权利要求24至41中的任一项所述的系统,还包括辐射传感器,该辐射传感器被配置为响应于检测到的辐射而生成信号,其中该信号被传输到控制器以使2d图像与传感器数据在时间上同步。
43.如权利要求24至42中的任一项所述的系统,还包括被配置为输出3d重建的图形表示的显示器。
44.一种包括指令的非暂态计算机可读介质,指令在由计算系统的一个或多个处理器执行时使计算系统执行包括以下的操作:
45.一种用于对解剖区域成像的方法,该方法包括:
46.如权利要求45所述的方法,其中姿态数据是从定位在解剖目标附近的基准标记板的图像生成的。
47.如权利要求46所述的方法,其中基准标记板包括多个基准标记并且基准标记中的至少一些基准标记位于不同的平面中。
48.如权利要求46或47所述的方法,其中基准标记板包括基座区域和从基座区域向上延伸的至少一个侧壁。
49.如权利要求45至48中的任一项所述的方法,其中姿态数据由耦合到成像臂的至少一个传感器生成。
50.一种用于操作成像装置的方法,该方法包括:
51.如权利要求50所述的方法,其中成像装置是移动c形臂装置。
52.如权利要求50或51所述的方法,其中第一图像和第二图像各自是在成像臂的螺旋桨旋转期间获得的。
53.如权利要求50至52中的任一项所述的方法,其中检测器包括图像增强器。
54.如权利要求50至53中的任一项所述的方法,其中第一基准标记布置在网格中。
55.如权利要求50至54中的任一项所述的方法,还包括使用由成像臂携带的至少一个传感器确定与第一图像相关联的成像臂的姿态数据,其中失真校正参数是基于姿态数据确定的。
56.如权利要求50至55中的任一项所述的方法,其中第二基准标记部署在体模内。
57.如权利要求50至56中的任一项所述的方法,还包括使用所述一组失真校正参数来调整第二图像中的至少一些第二图像。
58.如权利要求50至57中的任一项所述的方法,还包括使用由成像臂携带的至少一个传感器来确定与第二图像相关联的成像臂的姿态数据,其中几何校准参数是基于姿态数据确定的。
59.如权利要求58所述的方法,还包括处理第二图像以确定以下一项或多项:成像装置的刺穿点、偏斜度、俯仰、滚动、倾斜或源到检测器距离。
60.如权利要求58或59所述的方法,还包括:
61.如权利要求60所述的方法,其中反馈包括关于以下一项或多项的反馈:旋转轨迹、旋转速度、成像臂的朝向、成像臂的位置或成像臂的稳定性。
62.如权利要求50至61中的任一项所述的方法,还包括:
63.如权利要求62所述的方法,还包括:
64.如权利要求63所述的方法,还包括在生成体积重建之前基于来自所述至少一个传感器的数据更新失真校正参数或几何校准参数中的一个或多个。
65.一种用于对解剖区域成像的系统,该系统包括:
66.如权利要求65所述的系统,其中x射线成像装置是移动c形臂装置。
67.如权利要求65或66所述的系统,其中第一图像和第二图像各自是在成像臂的螺旋桨旋转期间获得的。
68.如权利要求65至67中的任一项所述的系统,其中检测器包括图像增强器。
69.如权利要求65至68中的任一项所述的系统,还包括基准标记网格。
70.如权利要求69所述的系统,其中基准标记网格包括中心部分和外围部分,中心部分具有与外围部分不同的图案。
71.如权利要求65至70中的任一项所述的系统,还包括用于将基准标记网格安装到检测器的附接设备。
72.如权利要求71所述的系统,还包括运动传感器,其中附接设备被配置为将运动传感器耦合到检测器。
73.如权利要求65至72中的任一项所述的系统,其中操作还包括使用运动传感器确定与第一图像相关联的成像臂的姿态数据,其中失真校正参数是基于姿态数据确定的。
74.如权利要求65至73中的任一项所述的系统,还包括基准标记体模。
75.如权利要求74所述的系统,其中基准标记体模包括在体模的中心部分处的至少一个第二基准标记。
76.如权利要求74或75所述的系统,其中体模包括:
77.如权利要求65至76中的任一项所述的系统,其中操作还包括使用所述一组失真校正参数来调整第二图像中的至少一些第二图像。
78.如权利要求65至77中的任一项所述的系统,还包括耦合到检测器的运动传感器。
79.如权利要求78所述的系统,其中操作还包括使用运动传感器确定与第二图像相关联的成像臂的姿态数据,其中几何校准参数是基于姿态数据确定的。
80.如权利要求79所述的系统,其中操作还包括:
81.如权利要求80所述的系统,还包括被配置为基于第二姿态数据与姿态数据的比较向用户输出反馈的显示器,其中反馈包括关于以下一项或多项的反馈:旋转轨迹、旋转速度、成像臂的朝向、成像臂的位置或成像臂的稳定性。
82.如权利要求65至81中的任一项所述的系统,其中操作还包括:
83.一种包括指令的非暂态计算机可读介质,指令在由计算系统的一个或多个处理器执行时使计算系统执行包括以下的操作:
84.一种用于对解剖区域成像的方法,该方法包括:
85.如权利要求84所述的方法,其中移动c形臂装置包括可滑动地耦合到成像臂的支撑臂,并且垫片结构定位在成像臂与支撑臂之间的接口处。
86.如权利要求85所述的方法,其中垫片结构被构造为减少成像臂相对于支撑臂的移动。
87.如权利要求85所述的方法,其中垫片结构被构造为至少部分地装配在成像臂与支撑臂之间的接口中。
88.如权利要求87所述的方法,其中垫片结构包括:
89.如权利要求85所述的方法,其中支撑臂可旋转地耦合到可移动基座,并且支撑臂和成像臂相对于可移动基座被手动旋转以获得2d图像。
90.如权利要求89所述的方法,其中手动旋转由施加到耦合在支撑臂与可移动基座之间的接口处或附近的杠杆结构的力致动。
91.如权利要求84所述的方法,其中手动旋转包括螺旋桨旋转。
92.如权利要求84所述的方法,其中手动旋转包括至少90度的旋转。
93.如权利要求84所述的方法,其中指示成像臂的所述多个姿态的数据是从耦合到成像臂的运动传感器接收的。
94.如权利要求93所述的方法,其中运动传感器包括惯性测量单元。
95.如权利要求84所述的方法,其中所述多个2d图像包括基准板,并且其中指示成像臂的所述多个姿态的数据是从2d图像生成的。
96.如权利要求84所述的方法,还包括将每个2d图像与在获得2d图像时成像臂的对应的姿态相关联。
97.如权利要求84所述的方法,其中3d重建包括锥形束计算机断层扫描重建。
98.如权利要求84所述的方法,还包括在生成3d重建之前将一个或多个失真校正参数应用于2d图像中的至少一些2d图像。
99.如权利要求84所述的方法,还包括在生成3d重建之前将一个或多个几何校准参数应用于2d图像中的至少一些2d图像。
100.如权利要求84所述的方法,其中生成3d重建是基于先前使用成像臂获取的姿态数据。
101.一种用于对解剖区域成像的方法,该方法包括:
102.如权利要求101所述的方法,其中x射线成像装置是移动c形臂装置。
103.如权利要求101所述的方法,其中手动旋转包括至少180度的螺旋桨旋转。
104.如权利要求101所述的方法,其中垫片结构抑制成像臂的轨道旋转。
105.如权利要求101所述的方法,其中x射线成像装置包括耦合到成像臂的支撑臂,并且垫片结构被构造为抑制成像臂相对于支撑臂的移动。
106.如权利要求105所述的方法,其中垫片结构被构造为填充支撑臂与成像臂之间的接口中的至少一个间隙。
107.如权利要求106所述的方法,其中垫片结构包括至少一个细长构件,所述至少一个细长构件被构造为定位在所述至少一个间隙内。
108.如权利要求101所述的方法,其中姿态数据是从与x射线成像装置相关联的至少一个传感器接收的,并且其中所述至少一个传感器包括耦合到成像臂的运动传感器。
109.如权利要求101所述的方法,还包括将2d图像与姿态数据在时间上同步。
110.如权利要求101所述的方法,其中将2d图像与姿态数据在时间上同步包括识别在获得每个2d图像时成像臂的姿态。
111.如权利要求110所述的方法,其中姿态包括成像臂的旋转角度。
112.如权利要求101所述的方法,其中姿态数据是第二姿态数据并且生成3d重建是基于先前使用成像臂获取的第一姿态数据。
113.一种用于对解剖区域成像的方法,该方法包括:
技术总结
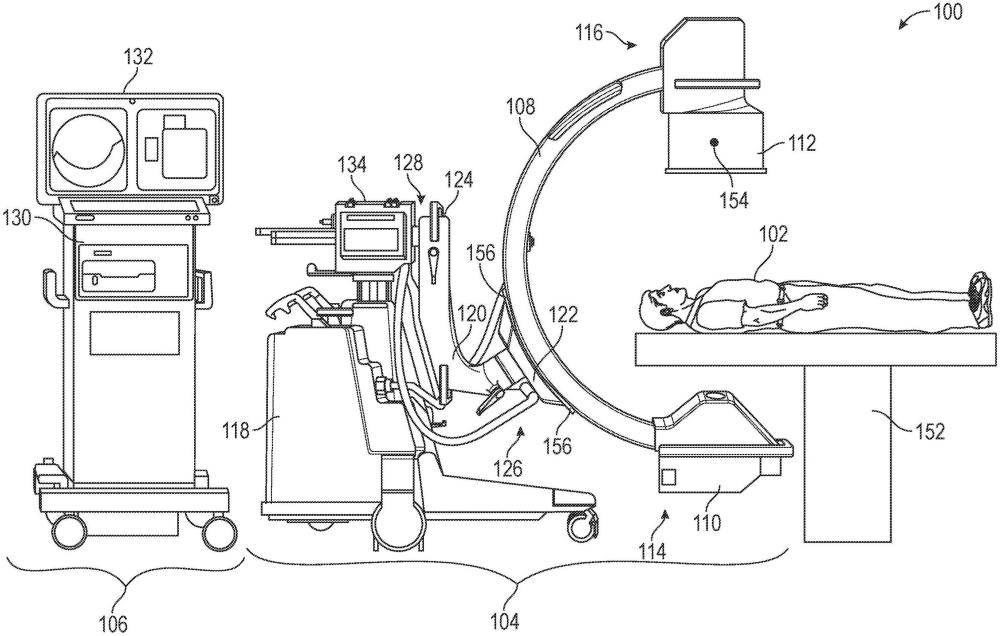
本文公开了用于医疗成像的系统、方法和设备。在一些实施例中,一种用于对解剖区域成像的方法包括从由x射线成像装置的成像臂携带的检测器接收解剖区域的多个图像。图像能够在成像臂的手动旋转期间获得。在手动旋转期间,成像臂能够通过垫片结构被稳定。该方法还可以包括从耦合到成像臂的至少一个传感器接收在手动旋转期间成像臂的姿态数据。该方法还可以包括基于图像和姿态数据生成解剖区域的3D表示。
技术研发人员:B·I·哈特利,李珂,R·瓦格斯-沃夏切克
受保护的技术使用者:普尔梅拉股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!