结合有超声换能器的外科器械、系统和方法与流程
本公开涉及基于能量的外科器械,并且更具体地涉及结合有超声换能器的外科器械、系统和方法。
背景技术:
1、结合有超声功能性的外科器械和系统利用超声能量(即,超声振动)来治疗组织。更具体地,以超声频率传输的机械振动能量可用于治疗(例如,密封和横切)组织。结合有超声功能性的外科器械可包括例如超声刀片和夹具机构,以使得能够将组织夹持在刀片上。传输到刀片的超声能量使刀片以非常高的频率振动,这允许加热组织以治疗夹持在刀片上或以其他方式与刀片接触的组织。
技术实现思路
1、根据本公开的各方面,提供了一种超声外科系统,该超声外科系统包括超声换能器,该超声换能器被配置成接收电驱动信号并且产生沿着该超声换能器的超声变幅杆输出的超声机械运动。该超声变幅杆限定凸轮槽。刀片从该超声变幅杆延伸。该刀片接收来自该超声变幅杆的该超声机械运动,以便治疗组织。钳口构件能够相对于该刀片在间隔开的位置与接近的位置之间移动,以便夹持组织。凸轮销能够滑动地设置在该凸轮槽中并且能够操作地联接到该钳口构件。使该凸轮销在该凸轮槽中能够滑动地行进而在该间隔开位置与该接近的位置之间致动该钳口构件。
2、根据本公开的各方面,至少一个横向孔被限定在该超声变幅杆中。枢轴销设置在该横向孔中。该枢轴销可操作地将该钳口构件联接到该刀片。
3、根据本公开的各方面,第二横向孔形成在超声变幅杆中。该第二横向孔被配置成对该超声机械运动通过超声变幅杆的传递进行平衡。
4、根据本公开的各方面,该第二横向孔关于该凸轮槽侧向偏移。
5、根据本公开的各方面,该第二横向孔关于该第一横向孔侧向偏移。
6、根据本公开的各方面,该超声换能器限定中心轴线。第二横向孔关于该超声换能器的中心轴线从该第一横向孔和该凸轮槽侧向偏移。
7、根据本公开的各方面,该凸轮槽限定近侧侧部和远侧侧部。该第一横向孔定位在该凸轮槽的该远侧侧部的远侧,并且该第二横向孔定位在该凸轮槽的该近侧侧部的近侧。
8、根据本公开的各方面,该第一横向孔定位在该中心轴线的第一侧部上,并且该第二横向孔定位在该中心轴线的与该第一侧部相对的第二侧部上。
9、根据本公开的各方面,细长组件支撑该超声换能器。该细长组件限定至少一个铰接接头。该超声换能器定位在该至少一个铰接接头的远侧侧部处。
10、根据本公开的各方面,该超声发生器定位在该至少一个铰接接头的该远侧侧部处。
11、根据本公开的各方面,该超声换能器、该刀片、该钳口和该凸轮销形成端部执行器组件的至少一部分,该端部执行器组件被配置成连接到机器人外科系统的机器人臂。
12、根据本公开的各方面,该超声换能器包括压电堆叠,该压电堆叠抵靠该超声变幅杆保持预压缩。该压电堆叠可直接在近侧端部块和该超声变幅杆之间保持预压缩。
13、根据本公开的各方面,该刀片直接从该超声变幅杆延伸。替代地,波导设置在该超声变幅杆和该刀片之间。
技术特征:
1.一种超声外科系统,所述超声外科系统包括:
2.根据权利要求1所述的超声外科系统,所述超声外科系统还包括限定在所述超声变幅杆中的至少一个横向孔和设置在所述横向孔中的枢轴销,其中所述枢轴销能够操作地将所述钳口构件联接到所述刀片。
3.根据权利要求2所述的超声外科系统,所述超声外科系统还包括形成在所述超声变幅杆中的第二横向孔,所述第二横向孔被配置成对所述超声机械运动通过所述超声变幅杆的传递进行平衡。
4.根据权利要求3所述的超声外科系统,其中所述第二横向孔关于所述凸轮槽侧向偏移。
5.根据权利要求3所述的超声外科系统,其中所述超声换能器限定中心轴线,并且其中所述第二横向孔关于所述超声换能器的所述中心轴线从所述至少一个横向孔和所述凸轮槽侧向偏移。
6.根据权利要求3所述的超声外科系统,其中所述凸轮槽限定近侧侧部和远侧侧部,并且其中所述第一横向孔定位在所述凸轮槽的所述远侧侧部的远侧,并且所述第二横向孔定位在所述凸轮槽的所述近侧侧部的近侧。
7.根据权利要求3所述的超声外科系统,其中所述超声换能器限定中心轴线,并且其中所述至少一个横向孔定位在所述中心轴线的第一侧部上,并且所述第二横向孔定位在所述中心轴线的与所述第一侧部相对的第二侧部上。
8.根据权利要求1所述的超声外科系统,所述超声外科系统还包括支撑所述超声换能器的细长组件,所述细长组件限定至少一个铰接接头,其中所述超声换能器定位在所述至少一个铰接接头的远侧。
9.根据权利要求8所述的超声外科系统,所述超声外科系统还包括被配置成提供所述电驱动信号的超声发生器,所述超声发生器定位在所述至少一个铰接接头的近侧。
10.根据权利要求8所述的超声外科系统,所述超声外科系统还包括支撑所述细长组件的手柄组件,所述细长组件从所述手柄组件向远侧延伸。
11.根据权利要求1所述的超声外科系统,其中所述超声换能器、所述刀片、所述钳口和所述凸轮销形成端部执行器组件的至少一部分,所述端部执行器组件被配置成连接到机器人外科系统的机器人臂。
12.根据权利要求1所述的超声外科系统,其中所述超声换能器包括压电堆叠,所述压电堆叠抵靠所述超声变幅杆保持预压缩。
13.根据权利要求12所述的超声外科系统,其中所述压电堆叠直接在近侧端部块和所述超声变幅杆之间保持预压缩。
14.根据权利要求1所述的超声外科系统,其中所述刀片直接从所述超声变幅杆延伸。
15.根据权利要求1所述的超声外科系统,所述超声外科系统还包括设置在所述超声变幅杆和所述刀片之间的波导。
技术总结
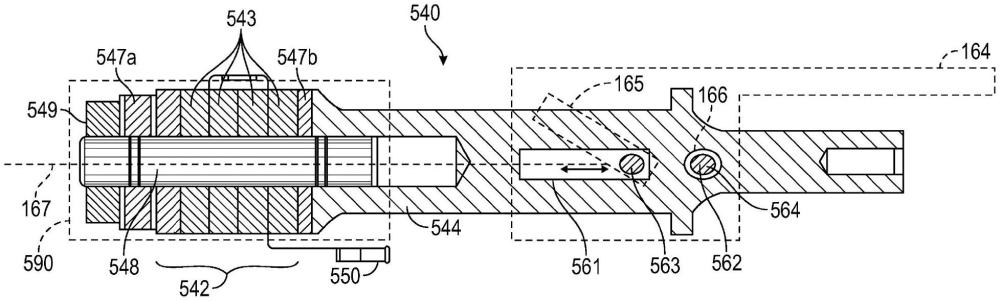
一种超声外科系统包括超声换能器(590),该超声换能器被配置成接收电驱动信号并且产生沿着该超声换能器的超声变幅杆(544)输出的超声机械运动。该超声变幅杆限定横向凸轮槽(561)。刀片从该超声变幅杆延伸。该刀片接收来自该超声变幅杆的该超声机械运动,以便治疗组织。钳口构件(164)能够相对于该刀片在间隔开的位置与接近的位置之间移动,以便夹持组织。凸轮销(563)能够滑动地设置在该凸轮槽中并且能够操作地联接到该钳口构件。使该凸轮销在该凸轮槽中能够滑动地行进而在该间隔开位置与该接近的位置之间致动该钳口构件。
技术研发人员:D·J·范托尔,M·B·莱昂斯,K·内泽尔,M·S·福莱,J·D·艾伦四世
受保护的技术使用者:柯惠有限合伙公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!