一种刚柔耦合的线驱动康复助力手套
本发明属于手功能康复助力设备,具体涉及一种刚柔耦合的线驱动康复助力手套。
背景技术:
1、脊髓损伤,脑卒中(中风)、偏瘫、帕金森症以及手部意外伤害等事件都会导致人手功能的缺失,轻则给患者带来日常生活和工作上的不便,重则造成患者失去生活自理能力,无法回归社会。而临床康复医学证明,对于疾病或意外伤害导致的手部运动功能障碍患者,中后期科学的康复训练对手功能有着重大的恢复作用。其中,进行持续性被动运动的康复训练(cpm,continuous passive motion),通过加强对肌肉肌腱的被动训练,有利于神经的修复重塑,减少患者手部残疾,可恢复部分人手功能。
2、传统的康复疗法,通常需要康复师和患者一对一进行康复训练,虽然康复效果较好,但是劳动量较大,患者康复周期长,而康复医师数量有限,无法满足所有患者的需求。因此,康复机器人领域应运而生,借助手部外骨骼机器人,不仅能为患者提供有效的康复治疗,减轻康复师的工作量,也可以通过交互技术,提高患者的康复体验,提高患者参与康复治疗的意愿和积极性。
3、据调查发现,现有的手部康复机器人往往功能较少,只能训练患者实施简单的抓握行为;并且不同病人由于自身条件不同,神经损伤部位的不同,最终恢复情况不一样,仍存在一些患者经过康复疗法后,无法完全恢复手部功能,只能完成一些简单的抓取行为。因此,针对这两种情况,需要设计出一款能训练并辅助手功能损失患者完成日常手部动作的康复设备,从而改善患者的工作和生活体验。
技术实现思路
1、为解决现有手部康复设备康复训练模式简单的不足,实现对患者手指训练并辅助更复杂更日常的手部动作的目的,本发明采用如下的技术方案:
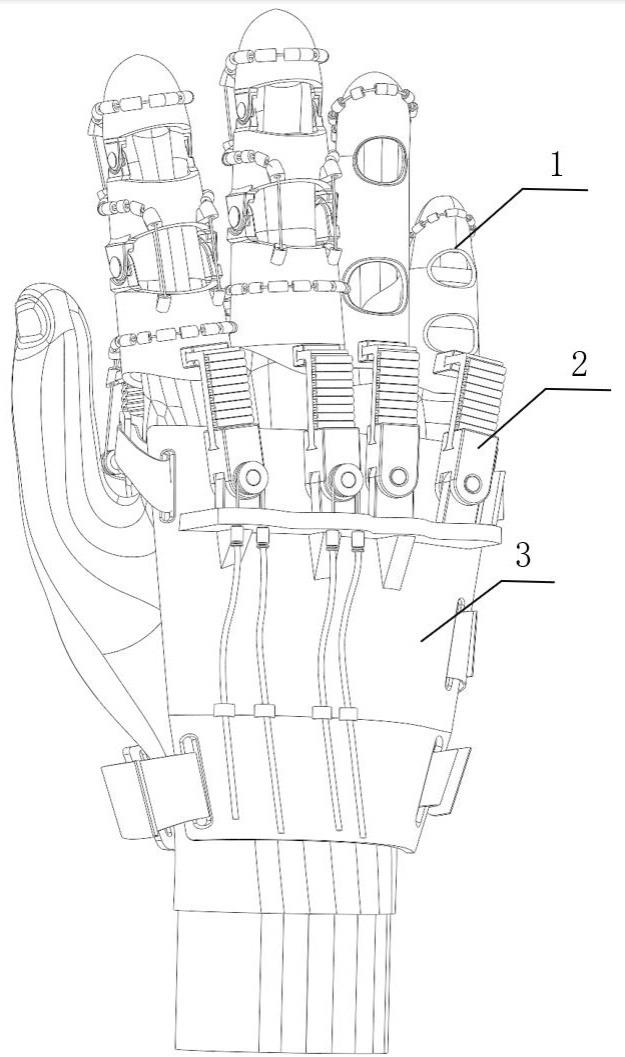
2、一种刚柔耦合的线驱动康复助力手套,包括手套穿戴机构和远端驱动装置,所述手套穿戴机构包括驱动指套、连接关节手部固定穿戴部件和驱动线,驱动指套通过连接关节与手部固定穿戴部件相连,驱动线缠绕于驱动指套,经远端驱动装置驱动,控制驱动指套的运动。
3、手部固定穿戴部件包括手背固定板和手掌固定板,手掌固定板和手掌固定板两侧均设有定位槽孔,柔性魔术贴通过定位槽孔连接手掌固定板和手掌固定板,穿戴于患者手部;
4、远端驱动装置包括放置于背部的驱动舵机和控制板。
5、进一步地,所述驱动线包括外展内收驱动线,所述手部固定穿戴部件的手背面,设有旋转基座,所述连接关节包括连接件、下掌指关节手背联动构件、第一驱动圆盘和驱动轴,下掌指关节手背联动构件一侧通过连接件与所述驱动指套连接,另一侧与旋转基座、第一驱动圆盘配合设置,套设于驱动轴上,其中下掌指关节手背联动构件和第一驱动圆盘均与驱动轴过盈连接,外展内收驱动线缠绕于带有凹槽的第一驱动圆盘,外展内收驱动线的两端与远端驱动装置连接。经远端驱动装置收放,使外展内收驱动线拉动第一驱动圆盘,第一驱动圆盘以驱动轴为圆心进行转动,并带动与其过盈配合的驱动轴,驱动轴再将转动传递给下掌指关节手背联动构件,经连接件带动驱动指套做外展内收运动,从而为传统的只有抓握功能的康复助理手套提供了外展内收运动的功能,同时,在外展内收运动中,由于掌指关节驱动线总长不变,因此掌指关节的外展内收运动不会影响掌指关节的伸展屈曲关节角度。
6、进一步地,所述驱动指节的指背处设有上掌指关节手背联动构件,上掌指关节手背联动构件与下掌指关节手背联动构件上均设有倒梯形凹槽,与所述连接件的纵截面两端呈内小外大的梯形配合设置。
7、进一步地,所述驱动线包括掌指关节驱动线,所述手部固定穿戴部件的手掌面上,为单个所述驱动指套配合设置一对传动部件,传动部件包括支撑轴、带有凹槽的第二驱动圆盘和圆盘固定件,支撑轴与手掌面固定连接,第二驱动圆盘套设在支撑轴上,并通过圆盘固定件限制其轴向移动,掌指关节驱动线缠绕一个传动部件的第二驱动圆盘后,绕过驱动指套背面,再缠绕另一个传动部件的第二驱动圆盘,掌指关节驱动线的两端与远端驱动装置连接。经远端驱动装置收放,使掌指关节驱动线两端一起往下做收紧运动,第二驱动圆盘随之在支撑轴上转动,驱动指套被掌指关节被驱动线带动而弯曲。
8、进一步地,所述驱动线还包括近端指间驱动线,所述驱动指套从指尖到掌指关节依次为活动连接的第一指节,第二指节和第三指节,第一、第二指节上对应设置上、下被动肌腱轨道,第二指节和第三指节上设有对应的近端指间关节驱动线轨道;被动肌腱经上、下被动肌腱轨道缠绕第一指节、第二指节,被动肌腱的两端固定于第三指节,近端指间关节驱动线一端穿过近端指间关节驱动线轨道与第二指节连接,另一端与远端驱动装置连接,第三指节通过连接关节与手部固定穿戴部件相连。当近端指间关节驱动线被远端驱动装置拉动时,线轨道的两端距离减少,使近端指间关节屈曲,被动肌腱下端(第二第三指节之间,且在肌腱轨道外的部分)同时因关节的屈曲长度增加,被动肌腱上端的长度(第一指节第二指节之间,且在肌腱轨道外的部分)因被动肌腱总长不变而减少,拉动远端指间关节屈曲。这种设计使得远端指间关节被近端指间关节的变化影响,从而实现了这两个关节的耦合驱动,符合人手运动学的现象,又减少了驱动数量。
9、所述驱动指套包括食指、中指、无名指和小指驱动指套,通过近端指间驱动线与分节的驱动指套配合设置,进行食指和中指驱动指套的近端指间关节的伸展屈曲运动;通过掌指关节驱动线与传动部件的配合设置,进行四指驱动指套的掌指关节伸展屈曲运动。
10、所述第三指节两侧至指背处设有掌指关节驱动线轨道,掌指关节驱动线穿过第三指节的掌指关节驱动线轨道。
11、根据手指运动学分析结果,无名指和小指在抓握等日常动作中运动行为具有高度协同性,且外展内收的运动较少,因此无名指和小指仅保留伸展屈曲行为,设计为一体式拉线指套,并且由同一根驱动肌腱驱动;而中指和食指则保留了掌指关节的外展内收运动和伸展屈曲运动,以及近端指间关节的伸展屈曲运动,以满足更丰富的抓取行为、日常手部动作以及灵巧操作。
12、进一步地,通过相邻指节的相对位置构建几何关系:
13、
14、
15、
16、l1=l-l3
17、
18、θdip=θ1_initial-θ1
19、θdip=θ2_initial-θ2
20、
21、
22、其中,l1表示上被动肌腱轨道与下被动肌腱轨道间被动肌腱长度,r1和θ1分别表示基于第一指节相对第二指节屈曲转动的中心点到上被动肌腱轨道与下被动肌腱轨道的距离及形成的角度;l2表示第二、第三指节的近端指间关节驱动线轨道指间的近端指间驱动线长度,r2和θ2分别表示基于第二指节相对第三指节转动的中心点到第二、第三指节的近端指间关节驱动线轨道的距离及形成的角度;l3表示下被动肌腱轨道与固定在第三指节上端之间的被动肌腱长度,r2和θ3分别表示基于第二指节相对第三指节转动的中心点到下被动肌腱轨道与第三指节的距离及形成的角度;θ2与θ3对应,上下分别为θ5和θ4,l=l1+l3;
23、θdip表示远端指间关节dip转动的角度,θpip表示近端指间关节pip转动的角度;θ1-initial表示θ1的初始角度,θ1改变的角度即dip转动的角度,θ2-initial表示θ2的初始角度,θ2改变的角度即pip关节转动的角度。
24、远端指间和近端指间关节的关系由指套结构的几何关系确立,通过设计参数可以参考手指运动学的数据以及关节间的协同运动来进行优化,使得指套关节间的耦合关系更符合关节实际运动情况。
25、进一步地,所述连接关节包括横向排列的波纹形柔性材料的连接件,连接件一端与所述手部固定穿戴部件的手背面连接,另一端与所述驱动指套的指背面连接。这种结构对于垂直于手背的力矩产生的形变较小,而对于纵向的拉伸力可以产生较大的拉伸和弯曲变形,并且在拉力释放后可恢复原来形状,这是为了将手指关节的外展内收以及伸展屈曲运动区分开,使得该连接件的结构对手指外展内收运动有较好的抵抗作用,而对手指的屈曲行为可以进行较好的适应性变形,并且存在一定的回复力和支撑力,因此这种柔性连接件可以作为手部固定穿戴部件手背面和驱动指套指背面的连接部件,传递手背驱动结构的外展内收运动,同时被动适应手指的伸展屈曲,不阻碍掌指关节被手掌的伸展屈曲驱动线驱动。
26、进一步地,所述连接关节包括横向折纸结构的柔性被动支撑件,柔性被动支撑件一端与所述手部固定穿戴部件的手掌面连接,另一端与所述驱动指套的指腹面连接。这是为了将掌指关节的外展内收以及屈曲运动区分开,这种结构对于垂直于手掌的力矩产生的形变较小,而对于纵向的压力可以产生较大的压缩变形,并且在压力释放后可恢复原来形状,因此这种柔性连接件对手指外展内收运动有较好的抵抗作用,而对手指的屈曲行为可以进行较好的适应性变形,存在一定的回复力和支撑力,柔性被动支撑件可以被动适应手指的外展内收运动和屈曲运动。
27、当掌指关节驱动线被远端驱动装置向下拉动时,掌指关节向前屈曲,柔性被动支撑被压缩,手背的柔性连接关节被拉伸。
28、进一步地,所述驱动指套的指腹处设有上被动支撑固定件,所述连接关节包括被动支撑件和下被动支撑固定件,上被动支撑固定件与下被动支撑固定件上均设有倒梯形凹槽,与被动支撑件纵截面两端呈内小外大的梯形配合设置,下被动支撑固定件与手部固定穿戴部件的手掌面连接。
29、进一步地,所述手部固定穿戴部件的手掌面上设有被动支撑旋转轴,所述连接关节包括被动支撑件、下被动支撑固定件、垫片和螺钉,被动支撑旋转轴穿过下被动支撑固定件上的圆孔,经垫片和螺钉固定,限制下被动支撑固定件的轴向位移,下被动支撑固定件经被动支撑件与所述驱动指套的指腹连接。
30、本发明的优势和有益效果在于:
31、相较于传统康复手套简单的康复动作,本发明基于手部日常动作增加了食指中指的外展内收驱动以及近端指间关节的驱动,而远端指间关节基于手指关节角度的耦合关系,通过一根被动肌腱由近端指间关节耦合驱动,无名指和小指仅由一根驱动线实现两者的耦合伸展屈曲行为;增加了可动关节的数量,能实现更多更复杂的手部动作,又在功能性和驱动数量上做到了平衡,既保证康复助力手套可以辅助完成更常见且复杂的手指运动,又避免了不必要的关节驱动,优化了驱动数量,减轻了装置重量。此外,食指和中指的指套区别于传统的一体拉线式指套,采用了铰链式的设计,基于指套模型的几何关系,能够通过线长的变化控制手部关节角度。并且对于掌指关节,增加了能抵抗弯曲扭矩,自适应弯曲压缩伸展的柔性连接件,来分开驱动掌指关节的伸展屈曲运动和外展内收运动。
- 还没有人留言评论。精彩留言会获得点赞!