一种模拟眼球运动的眼动仪检测装置的制作方法
1.本发明涉及眼动仪检测装置技术领域,具体涉及一种模拟眼球运动的眼动仪检测装置。
背景技术:
2.眼动仪主要用于检测人眼运动及注视方向,可精确锁定人眼注视点,广泛应用于生物仿真领域、游戏领域及军事领域。由于人眼转动速度高、注视时存在眼跳,因此眼动仪不能准确锁定人眼运动,将严重影响眼动仪检测精度。
3.由于我国眼动仪起步相较于美国较晚,相应的标准、检测和设备不完善,对眼动仪跟踪人眼运动速度、注视点和眼跳的设备更是寥寥无几,现阶段对眼动仪跟踪人眼运动速度、注视点和眼跳采用的是真人测试,由于人的个体生理差异、主观识别差异,无法准确控制和判定人眼的运动速度、注视点和眼跳,因此高精度的眼动仪研发上存在着精度无法准确衡量的问题。
技术实现要素:
4.本发明提出了一种模拟眼球运动的眼动仪检测装置,解决了现阶段眼动仪运动速度、注视点和眼跳的性能指标通过人眼验证的手段,有效的提高了检测效率和检测精度。
5.为实现上述目的,本发明提供如下技术方案:
6.本发明涉及一种模拟眼球运动的眼动仪检测装置,包括眼球壳体、电磁矩阵、惯性角度传感器、万向球壳体、轴向磁铁、电磁矩阵控制器;所述球形眼球壳体置于万向球壳体内,所述电磁矩阵置于万向球壳体后方中心,所述惯性角度传感器置于眼球壳体内部中心,所述轴向磁铁置于眼球壳体后部中心,所述电磁矩阵控制器与电磁矩阵和惯性角度传感器连接,在所述电磁矩阵控制器指令控制下实现电磁矩阵产生矢量磁场,带动轴向磁铁实现大范围、高速移动,所述电磁矩阵控制器实时采集惯性角度传感器的加速度信号和姿态信号,实现轴向磁铁运动的闭环控制。根据人眼球近似球体的特征,眼球壳体采用球体设计,眼球壳体放置于万向球壳内,通过万向球壳体内壁均匀分布的轴承滚珠夹持,使眼球壳体绕以球心为坐标原点的x,z轴旋转,实现了上、下、左、右大范围自由运动,通过眼球壳体后部安装的轴向磁铁,配合电磁矩阵能够实现访问三维空间位置不同点。
7.优选地,所述惯性角度传感器置于所述眼球壳体内部中心,且相对于所述眼球壳体固定。
8.优选地,所述眼动仪检测装置还包括若干轴承滚珠,分布在所述万向球壳体内壁。所述轴承滚珠的采用可以有效填补所述万向球壳体与所述眼球壳体之间的空隙,使所述眼球壳体在所述万向球壳体内大范围自由顺滑转动。
9.进一步优选地,其特征在于,所述若干轴承滚珠均匀分布在所述万向球壳体内壁,所述眼球壳体内部中心位置在任意角度下相对于所述万向轴壳体不发生变化。
10.优选地,所述轴向磁铁置于所述眼球壳体后部中心,且相对于所述眼球壳体固定。
11.进一步优选地,其特征在于,所述轴向磁铁磁轴垂直于所述眼球壳体后部外侧面中心切面。
12.更进一步优选地,其特征在于,所述轴向磁铁磁轴方向与所述电磁矩阵磁轴方向相反。
13.优选地,所述电磁矩阵的几何中心置于所述万向球壳体后方中心,且相对于所述万向球壳体固定。
14.进一步优选地,其特征在于,所述电磁矩阵几何中心磁轴与所述万向球壳体后方中心位置切面相互垂直。
15.优选地,所述电磁矩阵包括若干电磁铁和电磁矩阵基座,若干所述电磁铁固定于所述电磁矩阵基座上,若干所述电磁铁以规则的几何排列分布组成,所述电磁铁与所述电磁矩阵控制器电连接。
16.进一步优选地,其特征在于,所述若干电磁铁电流方向一致。
17.优选地,所述电磁矩阵面向于所述万向球壳体的表面为规则曲面或平面。
18.优选地,所述电磁矩阵控制器能够控制任意一个所述电磁铁的电流和电压。
19.使所述电磁铁产生可变化的磁场,通过不同位置的所述电磁铁组合产生一个矢量磁场,控制所述轴向磁铁移动的距离和速度。
20.与现有技术相比,本发明的有益效果是:
21.本发明是一种模拟眼球运动的眼动仪检测装置,通过所述万向球壳体与所述电磁矩阵的配合,使所述眼球壳体实现绕球心转动,通过所述电磁矩阵中若干所述电磁铁产生的磁场组合可以产生矢量叠加磁场,使所述轴向磁铁可以在矢量磁场下高速移动,通过改变矢量磁场的大小,可实现所述轴向磁铁移动速度的变换,通过改变矢量磁场的方向,可以实现所述轴向磁铁移动方向的变换,通过所述惯性角度传感器加速度和角度的反馈数据,可精准控制眼动仪检测装置在指定范围内移动的方向和速度,有效解决了眼动仪研发过程中,采用人眼进行判断带来的主观误差与个体生理构造带来的客观误差,同时相对于传统采用电机控制的模拟眼球控制具备更小的体积、更高的精度以及更为简洁的系统构造。
附图说明
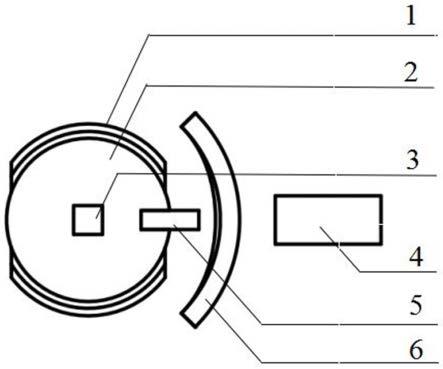
22.图1为本发明的结构示意图;
23.图2为本发明的万向球壳体结构示意图;
24.图3为本发明的电磁矩阵结构示意图。
25.图中:1-万向球壳体、2-眼球壳体、3-惯性角度传感器、4-电磁矩阵控制器、5-轴向磁铁、6-电磁矩阵、101-轴承滚珠、601-电磁铁、602-电磁矩阵基座。
具体实施方式
26.为了便于理解本发明,下面将参照相关附图对本发明进行更加全面的描述,附图中给出了本发明的若干实施例,但是本发明可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本发明公开的内容更加透彻全面。
27.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另
一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“前”、“后”“左”、“右”以及类似的表述只是为了说明的目的。
28.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常连接的含义相同,本文中在本发明的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本发明,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
29.实施例一:本发明提出一种模拟眼球运动的眼动仪检测装置,其依赖于图1所示的装置实现。
30.图1中,一种模拟眼球运动的眼动仪检测装置,包括:万向球壳体(1)、眼球壳体(2)、惯性角度传感器(3)、电磁矩阵控制器(4)、轴向磁铁(5)和电磁矩阵(6);
31.眼球壳体(2)采用正球形外观,安装在万向球壳体(1)内,如图2所示,万向球壳体(1)内壁均匀排布8颗轴承滚珠(101),眼球壳体(2)与8颗轴承滚珠(101)紧密贴合并可自由转动。电磁矩阵(6)安装在万向球壳体(1)后方,并且电磁矩阵(6)表面几何中心与万向球壳体(1)后方中心切面相垂直且在一条轴线上。惯性角度传感器(3)固定于眼球壳体(2)内部几何球中心位置,轴向磁铁(5)固定于眼球壳体(2)后部外侧面中心位置,且轴向磁铁(5)n极朝外,电磁矩阵控制器(4)与电磁矩阵(6)和惯性角度传感器(3)连接,如图3,电磁矩阵(6)采用5
×
5的电磁铁(601)阵列排布,在电磁矩阵控制器(4)指令控制下,电磁铁(601)产生s极磁场,电磁矩阵控制器(4)实时采集惯性角度传感器(3)的加速度信号和姿态信号,根据设定的转动速度及方向,计算出移动轴向磁铁(5)需要的矢量磁场,电磁矩阵控制器(4)控制对应区域的电磁铁(601)电流和电压变化,使电磁矩阵(6)产生矢量磁场,带动轴向磁铁(5)实现大范围、高速移动,实现轴向磁铁(5)运动的闭环控制。
32.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
33.上述结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的这种非实质改进,或未经改进将本发明的构思和技术方案直接应用于其他场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1