一种踝关节运动矫形器的制作方法
本发明属于康复运动设备领域,涉及一种踝关节运动矫形器。
背景技术:
1、随着人口老龄化问题的日益加剧,我国患脑卒中的人数也在逐年增加,脑卒中可导致人体步态运动障碍,影响患者的日常生活,从而严重影响生活质量,医学研究表明,必要的物理康复可促进患者身体运动机能恢复,但是步态康复运动是一项耗时长、动作重复性强的运动,对医护人员体能消耗较大,因此研发仿生的步态训练设备十分必要,求其是对末端肢体踝关节等的运动的康复设备,既可以帮助患者康复训练,又可以减轻医护人员的工作负担。
2、目前步态训练设备种类较多,如足部运动轨迹为圆形的脚踏车,足部运动轨迹为椭圆形的椭圆健身机等,它们多是以健康人为服务对象进行开发的设备,增强使用者的肌肉力量,而对于康复患者而言,训练设备应该以符合仿生学需求去训练关节运动。因此,依据健康人步态过程中的踝关节运动轨迹,遵循仿生学与人体工程学要求去设计一款结构紧凑,运动仿生的行走过程中的仿生踝关节矫形器,在医疗康复设备研究领域具有重大意义。
技术实现思路
1、本发明的目的在于提供一种踝关节运动矫形器,解决现有康复设备仅注重力量训练,不注重运动仿生与矫形的问题,通过结构变换,设备可实现多种工作模式,满足更多人的需要。以实现健康人体步态运动时踝关节的三维运动轨迹为目标,设计丝杠螺母与三个并联的旋转副和移动副结构,驱动踝关节实现仿生运动轨迹,以安装在足部机构上的三个力传感器为输入量,建立包含导纳控制外环与pid控制内环的控制方法,实现人机柔顺交互,提升患者使用的舒适性。
2、为达到上述目的,本发明通过如下技术方案予以实现:
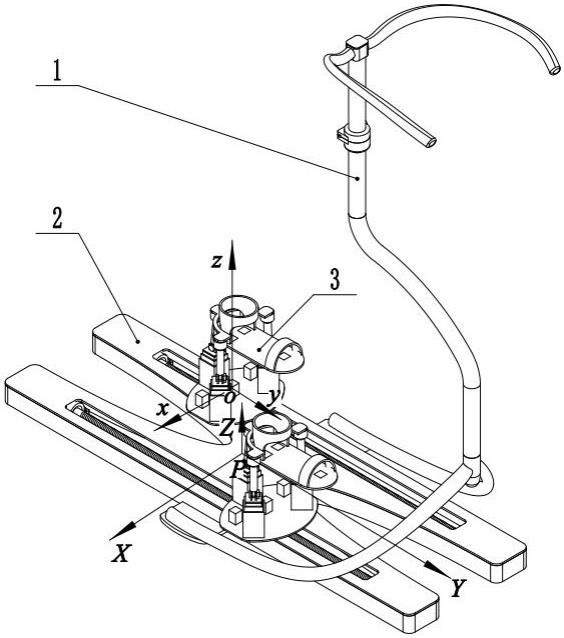
3、所述的一种踝关节运动矫形器,包括扶手机构1、驱动箱2、足部机构3,所述扶手机构1固连在驱动箱2的两侧,足部机构3安装驱动箱2的矩形孔上方,可沿孔移动。
4、所述的扶手机构1包括方形盖板101、第一锥齿轮102、第二锥齿轮103、第一套管104、把手105、螺纹异形杆106、螺纹套管107、蜗轮108、蜗杆109、第二套管110、支架111、第一电机112,所述支架111固连在驱动箱2的两侧,第二套管110下端固连在支架111的上端,螺纹异形杆106下段方形轴穿入螺纹套管107、蜗轮108与第二套管110的中间孔,螺纹异形杆106上段螺纹处于螺纹套管107内部上段螺纹配合,蜗轮108与蜗杆109安装在第二套管110上端凹槽内部,实现蜗杆109带动蜗轮108运动,蜗轮109带动嵌入内部方孔的螺纹异形杆106旋转,实现螺纹异型杆106旋转上升,第一电机112固连在第二套管110的上端,第一电机112输出轴与蜗杆109固连,第一锥齿轮102下段光轴嵌套在第一套管104的上端凹槽内,两者之间可自由旋转,但无法脱离,螺纹异形杆106上端插入第一套管104的下段孔内,其上端与第一锥齿轮102下端固连,第一套管104嵌套在螺纹套管107的外部,两者之间存在矩形凹槽与矩形凸起,确保螺纹套管107仅可沿第一套管104的轴线移动,不发生相对转动,两个所述的第二锥齿轮103与第一锥齿轮102两端啮合,两个所述把手105固连在两个所述的第二锥齿轮103中间孔内,当螺纹异型杆106旋转上升时,驱动第一锥齿轮102带动两个所述的第二锥齿轮103运动,进而带动两个所述把手105旋转,实现设备的姿态变换,方形盖板101固连在第一套管104的上端口。
5、所述的驱动箱2包括第一箱盖201、第二电机202、联轴器203、轴承支座204、第一轴承205、第一丝杠206、滑台207、第二箱盖208,所述第二电机202固连在第二箱盖208低面,第一轴承205安装在轴承支座204内部,联轴器203一端固连在第二电机202的输出轴上,联轴器203另外一端与穿过第一轴承205的第一丝杠206一端固连,滑台207螺纹孔安装在第一丝杠206上,滑台207底部与第二箱盖208底面接触,实现第一丝杠206旋转时,驱动滑台207沿第一丝杠206的轴线方向运动,第一箱盖201固连在第二箱盖208上方。
6、所述的足部机构3包括脚踝绑带301、脚面绑带302、足部上平台303、球窝座304、球头连杆305、方盖306、第一套盒307、第一套盒座308、第二套盒309、第四套杆310、第二轴承311、第二套盒座312、第二丝杠313、第三轴承314、第三套盒315、足部下平台316、第一齿轮317、第二齿轮318、传动带319、第三电机320、力传感器321,所述脚踝绑带301与脚面绑带302固连在足部上平台303上端面,力传感器321安装在足部上平台303后部三个突出圆台与三个所述的球窝座304之间,球头连杆305上端圆球嵌入球窝座304的底部圆孔内,形成球副连接,球头连杆305下端与方盖306上端旋转连接,方盖306下端固连在第一套盒307的上端,第一套盒座308固连在第一套盒307的下端,第一套盒307插入第二套盒309内方孔中,第四套杆310上段螺纹与第一套盒座308内螺纹配合,第四套杆310下端通过第二轴承311安装在第二套盒座312上端,第二套盒座312下端固连在第三套盒315的上端口,第二套盒309插入第三套盒315内方孔中,第三套盒315固连在足部下平台316上端面,第二丝杠313外螺纹与第二套盒座312内螺纹配合,同时第二丝杠313上段插入第四套杆310的下段内孔中,第二丝杠313外部矩形凸块与第四套杆310内部矩形凹槽配合,确保第四套杆310与第二丝杠313同时转动,第二丝杠313下段穿过第三轴承314内孔、足部下平台316内孔与第二齿轮318固连,第一齿轮317与第二齿轮318均固连在足部下平台316的下端面,传动带319连接第一齿轮317与第二齿轮318,第三电机320的输出轴穿过足部下平台316的圆孔与第一齿轮固连,实现第三电机320旋转时,通过传动带319驱动第二齿轮318旋转运动,第二齿轮318与第二丝杠313、第四套杆310共同旋转,通过螺纹带动第一套盒307与第二套盒309伸缩运动,第三电机320固连在足部下平台316的上端面。
7、所述的一种踝关节运动矫形器包含一种导纳控制外环与pid位置控制内环的控制方法,所述的一种导纳控制外环与pid位置控制内环的控制方法,首先,以人体步态运动中右脚触地时刻为零时刻位置,以此状态下骨盆中心在地面投影点为 p为原点,人体前进方向为 y轴,竖直向上为 z轴,通过右手定则确定 x轴方向,建立定坐标系 p-xyz,以用户踝关节中心在足部下平台316的投影位置为 o,踝关节跖屈/背屈轴和内翻/外翻轴在足部下平台316的投影分别为 x轴和 y轴,右手定则确定 z轴方向,建立足部运动坐标系 o-xyz,其次,所述的导纳控制外环实时检测足部机构3中三个所述的力传感器321的数值,以足后侧的力传感器321数值为 f1,足内侧和外侧的力传感器321数值为 f2和 f3,通过矢量计算得到用户足部与足部下平台316之间沿y轴、z轴、绕 x、绕 y轴的交互力 f y 、 f z、 m x和 m y,求它们与健康人体步态运动中足部沿 y轴、 z轴、绕 x、绕 y轴的期望交互力 f ye、 f ze、 m xe和 m ye的差值,得差值δ f y、δ f z、δ m x和δ m y,将差值输入到导纳控制器后,输出步态运动中足部沿 y轴的轨迹差值δ y,足部沿 z轴的轨迹差值δ z,踝关节跖屈/背屈差值角度δ α,踝关节内翻/外翻的差值δ β,最后,将健康人体在步态运动中足部沿 y轴的期望轨迹 y e、足部沿 z轴的期望轨迹 z e、踝关节跖屈/背屈角度 α和内翻/外翻运动 β分别与δ y、δ z、δ α和δ β进行矢量求和后,输入到pid位置控制器,驱动设备运动,并将设备的反馈实时传输到输入处,最终实现设备辅助用户仿生运动的目的。
8、本发明的有益效果在于:依据健康人步态行走时的踝关节运动轨迹,设计机械结构,并控制电机速度实现仿生助动的运动矫形效果,扶手机构可变换不同的形态,对应设备的多种工作模式,满足不同人群的相应需要,通过滑台在丝杠上运动与多级套杆伸缩运动,实现足部下平台的仿生三维运动轨迹,通过安装在足部下平台不同位置的多维力传感器,测量足部下平台不同方向的受力,并通过所建立的包含导纳控制外环与pid位置控制内环的控制方法,控制电机驱动设备,确保了人机交互的柔顺性,提升了使用舒适度,所设计的康复设备,功能多样,结构紧凑,可有效帮助患者在步行状态下训练步态和踝关节运动矫形,为智能仿生运动康复设备提供一种新方案。
- 还没有人留言评论。精彩留言会获得点赞!