一种基于动态运动基元的机器人镜像训练控制方法
本发明属于医疗康复训练机器人领域,尤其涉及一种基于动态运动基元的机器人镜像训练控制方法。
背景技术:
1、脑卒中是一种由诱发因素引起脑内动脉狭窄,闭塞或破裂,而造成急性脑血液循环障碍,临床上表现为一过性或永久性脑功能障碍的症状和体征。偏瘫是脑卒中后常见残疾,其主要表现为患侧肌力减退、肢体痉挛以及活动受限,对患者日常生活造成严重影响,偏瘫患者下肢功能的恢复一直是康复治疗的难点。
2、研究表明,持续的被动康复训练不能对患者的运功功能恢复起到很好的作用,患者在康复训练中的积极参与和主动努力被认为是促进治疗效果的重要因素之一。近年来,镜像康复训练方法在上肢运动功能的康复治疗中应用越来越广泛,理论研究和临床实践证明镜像康复训练方法对于改善患肢运动技能、修复周围神经损伤、缓解疼痛具有显著的疗效。
3、传统的镜像康复训练多采用健侧主导患侧模式,健侧的运动被完全复制并传递给患侧的机器人﹐而患侧的运动能力没有被考虑。事实上,偏瘫病人的健侧和患侧的运动能力差别很大﹐而目前的镜像康复训练则假设机器人和健侧共享相同的轨迹。然而,这可能会导致机器人的运动量过大﹐对患侧造成二次伤害。因此,需要在双侧运动同步和改善康复疗效之间寻求权衡。事实上,在实际工作中﹐患侧和机器人共同(相互)作用产生一个运动轨迹跟踪健侧的运动。因此﹐对机器人运动轨迹的精确建模有助于患侧的康复并保证安全﹐在镜像康复训练中有着重大意义。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种基于动态运动基元的机器人镜像训练控制方法,使得偏瘫患者可以在机器人的辅助下自主完成康复训练,促使康复训练过程更加安全舒适。
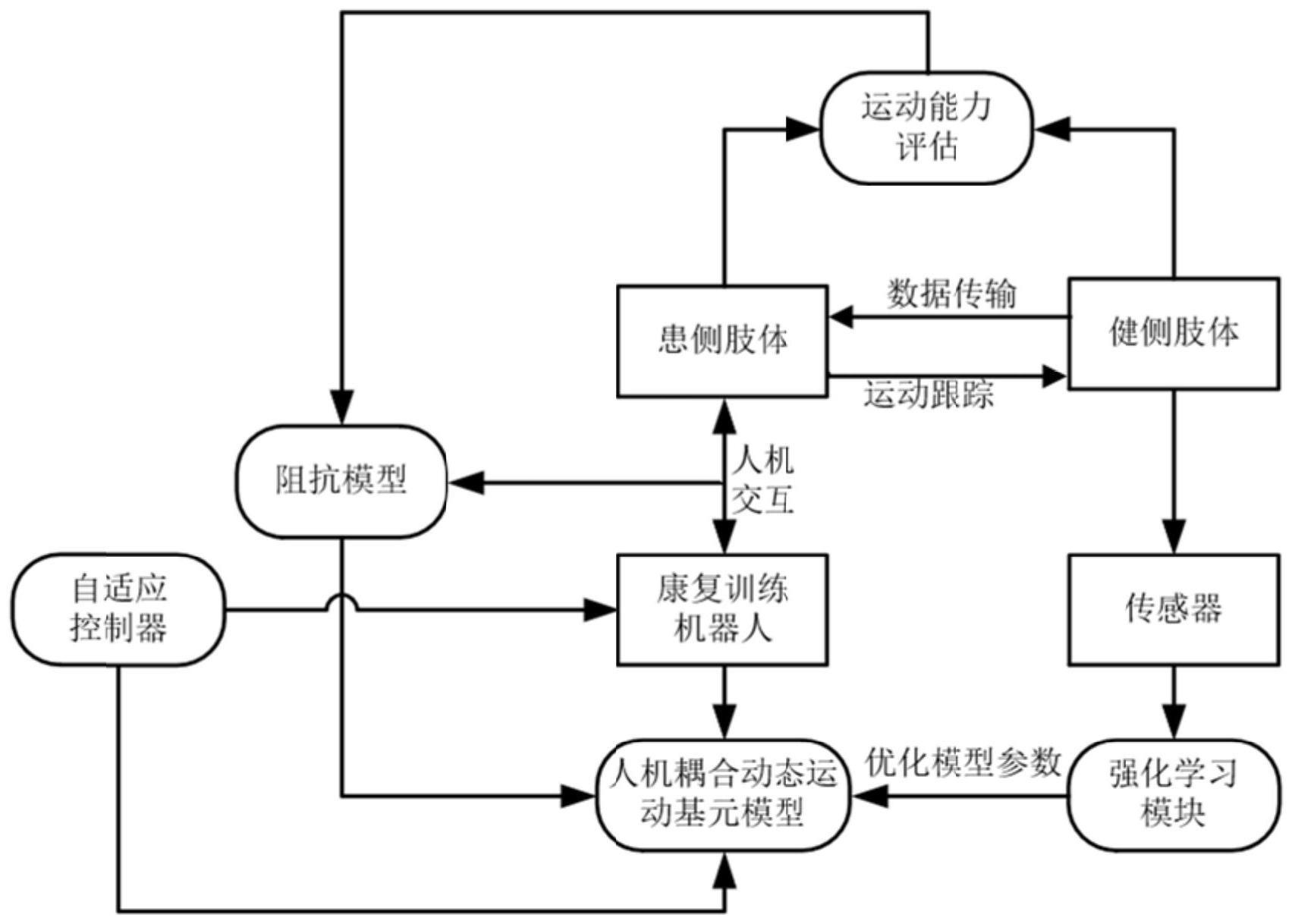
2、本发明方法包括:建立患侧运动轨迹规划模块和康复训练执行模块;
3、所述患侧运动轨迹规划模块通过构建患侧人机耦合系统的运动轨迹模型生成康复训练机器人的运动轨迹,所述康复训练机器人采用北京大艾机器人公司研制的运动康复训练机器人;
4、所述康复训练执行模块通过使用自适应控制器对康复训练机器人的理想运动轨迹进行跟踪,由健侧肢体带动患侧肢体运动完成康复训练。
5、所述患侧运动轨迹规划模块使用与弹簧阻尼型阻抗模型混合的动态运动基元模型建立患侧人机耦合系统的运动轨迹模型,所述动态运动基元模型数学公式为:
6、
7、
8、其中,τ表示运动持续时间,y和分别是关节轨迹位置和速度,g是目标关节位置,x和z表示内部状态,αz和βz是比例系数,并且αz=4βz;
9、与弹簧阻尼型阻抗模型混合后,所述患侧人机耦合系统的运动轨迹模型的数学公式为:
10、
11、
12、其中,c1和c2为常数;i为弹簧阻尼型阻抗模型,表示弹簧阻尼型阻抗模型的一阶导数,i用于表示患侧与康复训练机器人之间的交互作用,公式为:
13、
14、其中,kh和dh分别为人体关节刚度和阻尼参数,q和分别为机器人关节的位置和关节速度,和分别表示患侧肢体的关节位置和速度,表示n维实数矩阵;
15、f(x)是具有高斯核的非线性函数的组合。
16、f(x)数学公式为:
17、
18、其中是高斯基函数,n表示高斯基函数的数量,wi是决定步态轨迹形状的每个基函数的权值。
19、所述人体关节刚度计算公式为:
20、
21、其中αh和βh是常数;agonist、antagonist分别表示主动肌和拮抗肌,j和l分别表示作用于关节的主动肌数量和拮抗肌数量,τi和τj分别表示主动肌的肌肉力矩和拮抗肌的肌肉力矩。
22、所述阻尼参数计算公式为:
23、
24、其中vh是一个常数。
25、所述患侧运动轨迹规划模块通过强化学习更新患肢的人体关节刚度和阻尼参数,强化学习的目标是最小化惩罚函数rt:
26、
27、其中,qhl是健侧的关节位置,是健侧的关节速度,qil是患侧的关节位置,是患侧的关节速度,是康复训练机器人关节加速度,khl和dhl是健侧的关节刚度和阻尼;γ1、γ2、γ3、γ4和γ5是平衡各项式的权重值,取值依次为100,50,40,20,5,t表示矩阵转置;
28、重复更新迭代未确定的参数,即kh、dh、c1以及c2,直到惩罚函数收敛,得到最优参数,从而得到康复训练机器人的运动轨迹。
29、所述康复训练执行模块通过使用自适应控制器对康复训练机器人的理想运动轨迹进行跟踪,具体包括:
30、康复训练机器人实际轨迹与期望轨迹之间的跟踪误差公式为:
31、eq(t)=q(t)-qd(t)
32、其中eq(t)表示t时刻机器人实际轨迹与期望轨迹之间的跟踪误差,q(t)是t时刻机器人实际轨迹,qd(t)表示t时刻机器人的期望的轨迹;
33、建立滑模变量用来增强轨迹误差,公式为:
34、
35、其中sq(t)表示t时刻滑模变量,表示t时刻机器人跟踪误差的一阶导数,κ1为常数;
36、参考速度公式为:
37、
38、其中是t时刻机器人参考速度,是t时刻机器人的期望速度;
39、建立康复训练机器人的动力学模型,公式为:
40、
41、其中是康复训练机器人关节的位置协调,n表示康复训练机器人关节的数量,和分别表示康复训练机器人关节速度和加速度;是惯性矩阵,是向心力矩和科里奥利力矩矩阵,是重力力矩,是摩擦力矩,是康复训练机器人关节驱动器输出力矩,是由患侧肢体施加的交互力矩,表示n维实数矩阵,表示n×n的实数矩阵;
42、将康复训练机器人的动态模型的公式左侧线性化表示为:
43、
44、其中是已知动态回归矩阵,数学表达式如下:
45、
46、其中w11、w12、w13、w14、w22、w25、w26为已知动态回归矩阵中的元素,数学表达式如下:
47、
48、
49、
50、
51、
52、
53、
54、其中,l1、l2分别表示由康复训练机器人髋关节驱动器带动的机械臂的长度和膝关节驱动器带动的机械臂的长度,θ1、θ2分别表示康复训练机器人髋关节的转动角度和膝关节的转动角度,分别表示运动康复训练机器人髋关节的角速度和膝关节的角速度,分别表示运动康复训练机器人髋关节的角加速度和膝关节的角加速度;
55、pq为未知常数,数学表达式为:
56、pq=[m1 m2 k1 v1 k2 v2]t
57、其中,m1、m2分别表示运动康复训练机器人髋关节与膝关节的机械臂质量,k1、k2为常数,v1、v2分别表示运动康复训练机器人髋关节的摩擦系数和膝关节的摩擦系数;
58、基于康复训练机器人的动力学模型,建立用于机器人驱动的自适应控制器。
59、所述用于机器人驱动的自适应控制器的公式为:
60、
61、其中,和分别是惯性矩阵的估计值、向心力矩和科里奥利力矩矩阵的估计值、重力力矩的估计值和摩擦力矩的估计值,τact是由执行机构产生的机器人关节扭矩,是机器人关节的参考加速度,κ2是常数,sq是滑模变量,是机器人关节的参考速度,为患侧施加的相互作用扭矩的估计值。
62、所述自适应控制器的自适应规律表示为:
63、
64、其中为未知常数pq的估计值,γ为常数,为动态回归矩阵;
65、由自适应控制器驱动康复训练机器人带动患肢运动,完成完整的镜像康复训练。
66、本发明还提供了一种存储介质,存储有计算机程序或指令,当所述计算机程序或指令被运行时,实现所述一种基于动态运动基元的机器人镜像训练控制方法。
67、进一步的,所述患侧机器人运动轨迹通过强化学习方法进行调节,以优化人机耦合动态运动基元模型参数,使得其适应不同运动能力的使用者,提供按需辅助的训练强度。强化学习的输入是康复训练机器人和双侧肢体的运动学参数以及生理电信号,学习目标是最小化成本函数,需要满足以下三个规则:
68、1)尽量减少健侧和患侧肢体之间的轨迹跟踪误差,确保健侧肢体能够掌控和调节患侧肢体的运动﹐以保持安全和舒适。
69、2)使患侧肢体的康复效果最大化。
70、3)使生成的轨迹充分平滑﹐避免机器人突然的运动或过度的互动碰撞﹐以免伤害患侧肢体。
71、进一步的,所述康复训练执行模块使用自适应控制器对患侧人机耦合系统的运动轨迹进行跟踪。
72、与现有技术相比,本发明的有益效果是:
73、1、本发明的镜像康复训练方法利用偏瘫患者的运动特点﹐在可穿戴机器人的辅助和支撑下﹐利用健侧肢体的运动轨迹来引导、激励患侧肢体,实现自主康复训练。
74、2、本发明的镜像康复训练方法利用动态运动基元来模拟和生成机器人的运动轨迹,同时引入强化学习优化人机耦合系统的动态运动基元模型参数,使得康复训练能够适应具有不同运动能力的受试者,还可以根据病人的损伤程度实时调节机器人的运动,为偏瘫患者提供按需辅助的训练强度,在保障安全的前提下提升康复效率。
75、3、本发明的镜像康复训练方法构建了人机耦合系统的动态运动基元模型,使用肌电信号在康复训练之前对健侧和患侧的肌肉强度进行评估,并通过强化学习对患侧的关节刚度和关节阻尼参数进行更新,使得康复训练机器人能够根据患侧肌肉强度的变化进行调节。
76、4、本发明所述的强化学习方法中,患侧肢体的肌电信号不直接参与成本函数的构成,避免了患侧肌肉的突然收缩无法体现在肌电信号表征,从而造成康复训练机器人的大幅度运动,而对患侧造成二次伤害。
- 还没有人留言评论。精彩留言会获得点赞!