一种具有多靶点施药功能胶囊机器人系统
本申请涉及智能医疗领域,尤其涉及一种具有多靶点施药功能胶囊机器人系统。
背景技术:
1、胶囊机器人作为一种主动控制的微型机器人,能够安全高效地对血管、胃、肠道等腔体内进行无创诊疗,避免传统胃镜诊断过程痛苦大的缺点。
2、然而,由于胶囊机器人在敏感脆弱的腔体内部行进,难免造成损伤,而目前对胶囊机器人的控制,多是初级水平,大多只涉及动力学控制原理,运动过程的控制参数多为静态值,未兼顾到具体的处境,导致对腔体造成损伤,而且,对于多靶点施药的情况,目前多数按照人为设定的顺序给药,实际上,不同的顺序具有不同的创伤影响和效率。
3、因此,有必要提供一种新的方式,提高施药效率和对腔体的安全性。
技术实现思路
1、本说明书实施例提供一种具有多靶点施药功能胶囊机器人系统,用以施药效率和对腔体的安全性,该系统具体包括:
2、胶囊组件,具有行进件和施药件;
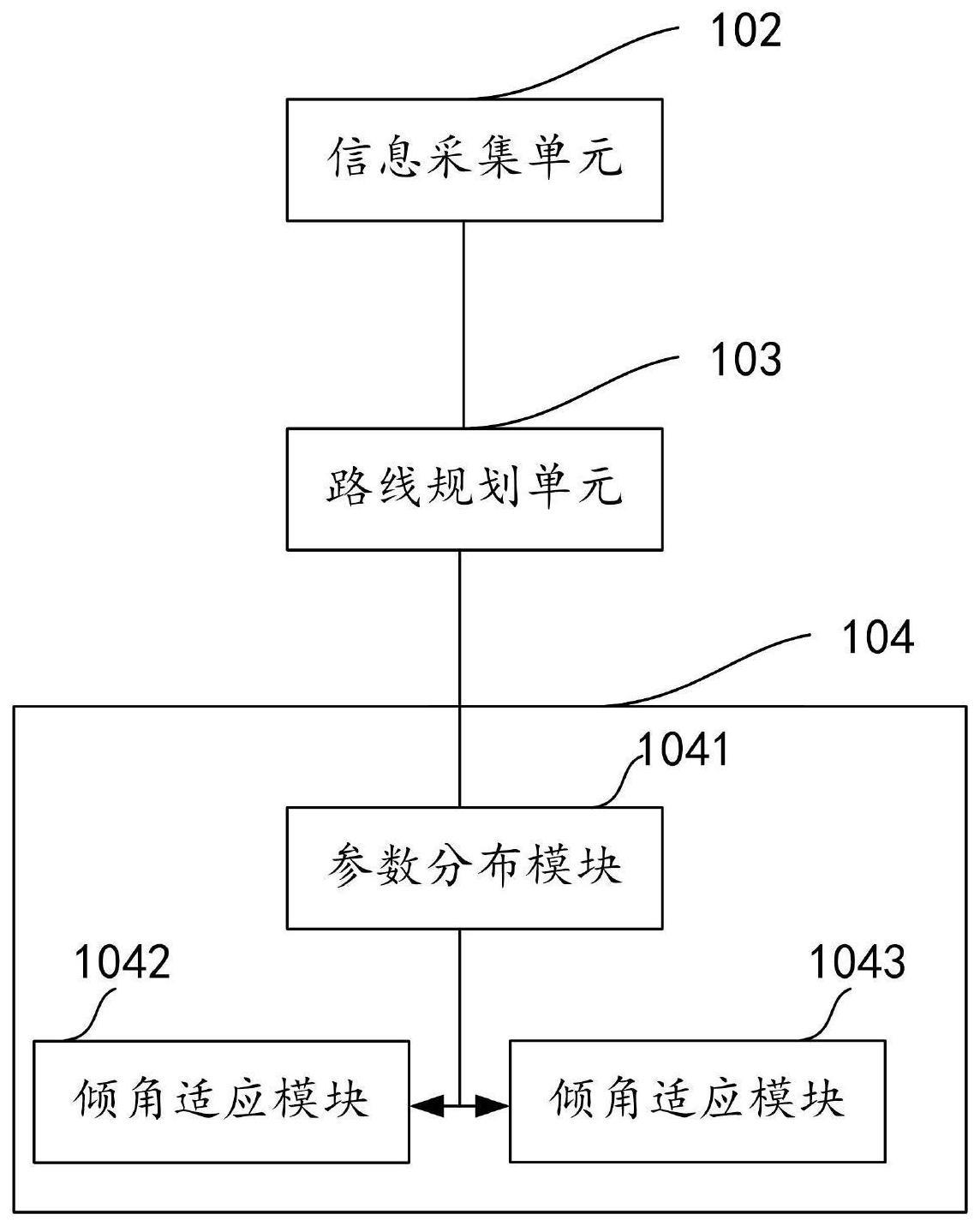
3、信息采集单元,记录胶囊机器人的运动过程,实时采集腔内信息;
4、路线规划单元,对多靶点之间的施药顺序进行强化学习规划得到多靶点的运动路线;
5、控制单元,包括:参数分布模块,倾角适应模块,速度适应模块,所述参数分布模块根据所述运动过程和所述腔内信息定位,计算待适应参数在该位置处的分布值,所述倾角适应模块根据所述分布值进行倾角适应,所述速度适应模块根据所述分布值进行速度大小适应,通过控制所述行进件使胶囊机器人按照所述多靶点的运动路线以及适应后的速度大小及倾角行进;
6、所述施药件在行进到预设靶点位置时进行施药。
7、可选地,所述对多靶点之间的施药顺序进行强化学习规划得到多靶点的运动路线,包括:
8、构造腔体三维模型,根据腔体内流体流速的大小和方向进行参数配置;
9、根据胶囊机器人在腔体内的位置、下一步移动方向、靶点施药顺序构造施药路线策略搜索空间,构造奖励函数,所述奖励函数的指标包括:流体流速对胶囊机器人速度的影响因子、胶囊机器人对腔体管壁的创伤影响因子、胶囊机器人总的耗时,创建多个粒子群在所述搜索空间内搜索施药路线策略,分别计算奖励函数值,筛选奖励函数值最大的施药路线策略,根据所述施药路线策略的搜索过程中胶囊机器人在腔体内的位置生成运动路线。
10、可选地,所述参数分布模块,还用于:
11、对胶囊机器人到管壁的最近垂直距离的倒数乘以速度后按照各位置对其进行求和,得到创伤影响因子。
12、可选地,所述计算待适应参数在该位置处的分布值,包括:
13、利用预设的分布状态预测模型,结合预设的耗时、不同位置到管壁的最近垂直距离、所述腔体的形状、质地、流体的流动性参数预测与其相适应的分布状态,根据所述分布状态确定该位置对应的分布值,所述分布状态为待适应参数值-最近垂直距离的波形。
14、可选地,还具有模型训练模块,用于收集历史施药事件中腔体的形状、质地、流体的流动性参数、机器人的速度、倾角、各位置到管壁的最近垂直距离和对管壁的创伤程度,根据管壁的创伤程度、胶囊机器人在多个位置处形成的速度分布、倾角分布设置训练标签,以胶囊机器人行进的总耗时、所述腔体的形状、质地、流体的流动性参数为训练样本输入,对预先搭建的模型架构进行训练,得到分布状态预测模型。
15、可选地,所述根据管壁的创伤程度、胶囊机器人在多个位置处形成的速度分布、倾角分布设置训练标签,包括:
16、根据管壁的创伤程度将不同历史施药事件的速度分布、倾角分布分别划分为黑白样本,以及根据管壁的创伤程度将同一历史施药事件的速度分布片段、倾角分布片段分别划分为黑白样本。
17、可选地,所述控制单元,还具有:
18、施药时机控制单元,用于,获取所述腔体中的流体搏动时序信息,根据所述流体搏动时序信息预测到未来第一时刻过程中的流体搏动状态累计导致的机器人位移预测搏动值,根据适应后的速度值计算到未来第一时刻过程中的机器人位移控制值,实时判断当前时刻是否达到施药时机,具体包括:判断机器人位移预测搏动值与机器人位移控制值的矢量之是否等于机器人当前位置与施药点的相对距离,若是则判定到达施药时机启动施药件,所述未来第一时刻距当前的时差等于启动施药件到施药件开始施药的时差。
19、可选地,所述腔体的质地包括:弹性、韧性和厚度。
20、可选地,所述施药的方式为刺入方式。
21、可选地,所述流体搏动时序信息包括带有时间信息的流体速度矢量,正负代表前进或后退。
22、本说明书实施例提供的各种技术方案通过胶囊组件,具有行进件和施药件,信息采集单元,记录胶囊机器人的运动过程,实时采集腔内信息,路线规划单元,对多靶点之间的施药顺序进行强化学习规划得到多靶点的运动路线,控制单元,包括:参数分布模块,倾角适应模块,速度适应模块,参数分布模块根据运动过程和腔内信息定位,计算待适应参数在该位置处的分布值,倾角适应模块根据分布值进行倾角适应,速度适应模块根据分布值进行速度大小适应,通过控制行进件使胶囊机器人按照多靶点的运动路线行进,施药件在行进到预设靶点位置时进行施药,通过强化学习和速度倾角对位置进行适应,提高了施药效率和对腔体的安全性。
技术特征:
1.一种具有多靶点施药功能胶囊机器人系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述对多靶点之间的施药顺序进行强化学习规划得到多靶点的运动路线,包括:
3.根据权利要求2所述的系统,其特征在于,所述参数分布模块,还用于:
4.根据权利要求1所述的系统,其特征在于,所述计算待适应参数在该位置处的分布值,包括:
5.根据权利要求4所述的系统,其特征在于,还具有模型训练模块,用于收集历史施药事件中腔体的形状、质地、流体的流动性参数、机器人的速度、倾角、各位置到管壁的最近垂直距离和对管壁的创伤程度,根据管壁的创伤程度、胶囊机器人在多个位置处形成的速度分布、倾角分布设置训练标签,以胶囊机器人行进的总耗时、所述腔体的形状、质地、流体的流动性参数为训练样本输入,对预先搭建的模型架构进行训练,得到分布状态预测模型。
6.根据权利要求5所述的系统,其特征在于,所述根据管壁的创伤程度、胶囊机器人在多个位置处形成的速度分布、倾角分布设置训练标签,包括:
7.根据权利要求5所述的系统,其特征在于,所述控制单元,还具有:
8.根据权利要求4所述的系统,其特征在于,所述腔体的质地包括:弹性、韧性和厚度。
9.根据权利要求1所述的系统,其特征在于,所述施药的方式为刺入方式。
10.根据权利要求1所述的系统,其特征在于,所述流体搏动时序信息包括带有时间信息的流体速度矢量,正负代表前进或后退。
技术总结
本说明书实施例提供一种具有多靶点施药功能胶囊机器人系统,胶囊组件,具有行进件和施药件,信息采集单元,记录胶囊机器人的运动过程,实时采集腔内信息,路线规划单元,对多靶点之间的施药顺序进行强化学习规划得到多靶点的运动路线,控制单元,包括:参数分布模块,倾角适应模块,速度适应模块,参数分布模块根据运动过程和腔内信息定位,计算待适应参数在该位置处的分布值,倾角适应模块根据分布值进行倾角适应,速度适应模块根据分布值进行速度大小适应,通过控制行进件使胶囊机器人按照多靶点的运动路线行进,施药件在行进到预设靶点位置时进行施药,通过强化学习和速度倾角对位置进行适应,提高了施药效率和对腔体的安全性。
技术研发人员:欧阳春
受保护的技术使用者:复旦大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!