一种柔索驱动核磁兼容前列腺穿刺手术机器人
本发明涉及一种前列腺穿刺手术机器人,特别涉及一种可以在核磁环境下工作的柔索驱动核磁兼容前列腺穿刺手术机器人。
背景技术:
1、前列腺癌是男性泌尿生殖系统最常见的恶性肿瘤之一,前列腺癌的初期诊断干预治疗能显著提高患者的生存几率。近年来,前列腺穿刺活检成为前列腺癌初期评估和诊断的一项重要手段。相比于传统的医生徒手操作,穿刺手术机器人在稳定性、准确性和安全性方面都有显著的优势。针对前列腺穿刺手术机器人,国内外均进行了相关研究。加拿大的andrew a.goldenberg等人研发了一台前列腺手术机器人,用于前列腺活检以及放射性粒子的植入,该机器人采用超声波电机驱动,具有核磁兼容性。天津大学针对前列腺穿刺机器人也进行了相关研究,该机器人属于混联机器人,传动机构采用开环丝传动系统,电机置于核磁共振仪外部,具有核磁兼容性。
2、目前核磁兼容前列腺穿刺机器人的研究中,一种超声引导下前列腺穿刺活检机器人(cn107260269a)采用多个旋转关节来调整超声探头以及活检针的位置,但该结构形式占用空间大,且水平方向上受重力影响,易产生较大的形变。并且由于超声探头与穿刺针安装在同一传动机构上,当超声探头到达病灶位置后,穿刺针的穿刺位置和穿刺角度无法继续调整。一种经直肠超声图像引导的前列腺穿刺机器人(cn114767228a)解决了现有前列腺穿刺手术机器人占用空间大的问题,但由于该发明中调整穿刺针角度的弧形轨道长度较短,从而导致该机器人的工作空间十分有限。
3、并且,上述两篇现有技术中的机器人均采用刚性结构,电机大多布置于机器人关节位置,从而使负载自重比小,可靠性较差。并且上述两篇现有技术中的机器人均采用超声引导,不适用于核磁环境下。
4、目前穿刺手术机器人大多为刚性结构,为了适用于核磁环境下,驱动形式大多采用气动或者核磁兼容电机驱动。柔索驱动穿刺手术机器人可以将电机外置,具有核磁兼容性,并且解决了气动驱动非线性和迟滞性的缺点以及核磁兼容电机输出扭矩较小的问题。柔性结构解决了现有传统刚性穿刺手术机器人低负载自重比的问题,并且柔索具有缓冲吸震的作用,提高了机器人的柔顺性与手术的执行精度。相对于现有的前列腺穿刺手术机器人,采用柔索驱动核磁兼容的前列腺穿刺手术机器人具有占用空间小,工作空间大,可靠性高的优点。
技术实现思路
1、为了解决现有刚性机器人的弊端,同时满足核磁环境兼容的问题,本发明提出了一种柔索驱动核磁兼容前列腺穿刺手术手术机器人。
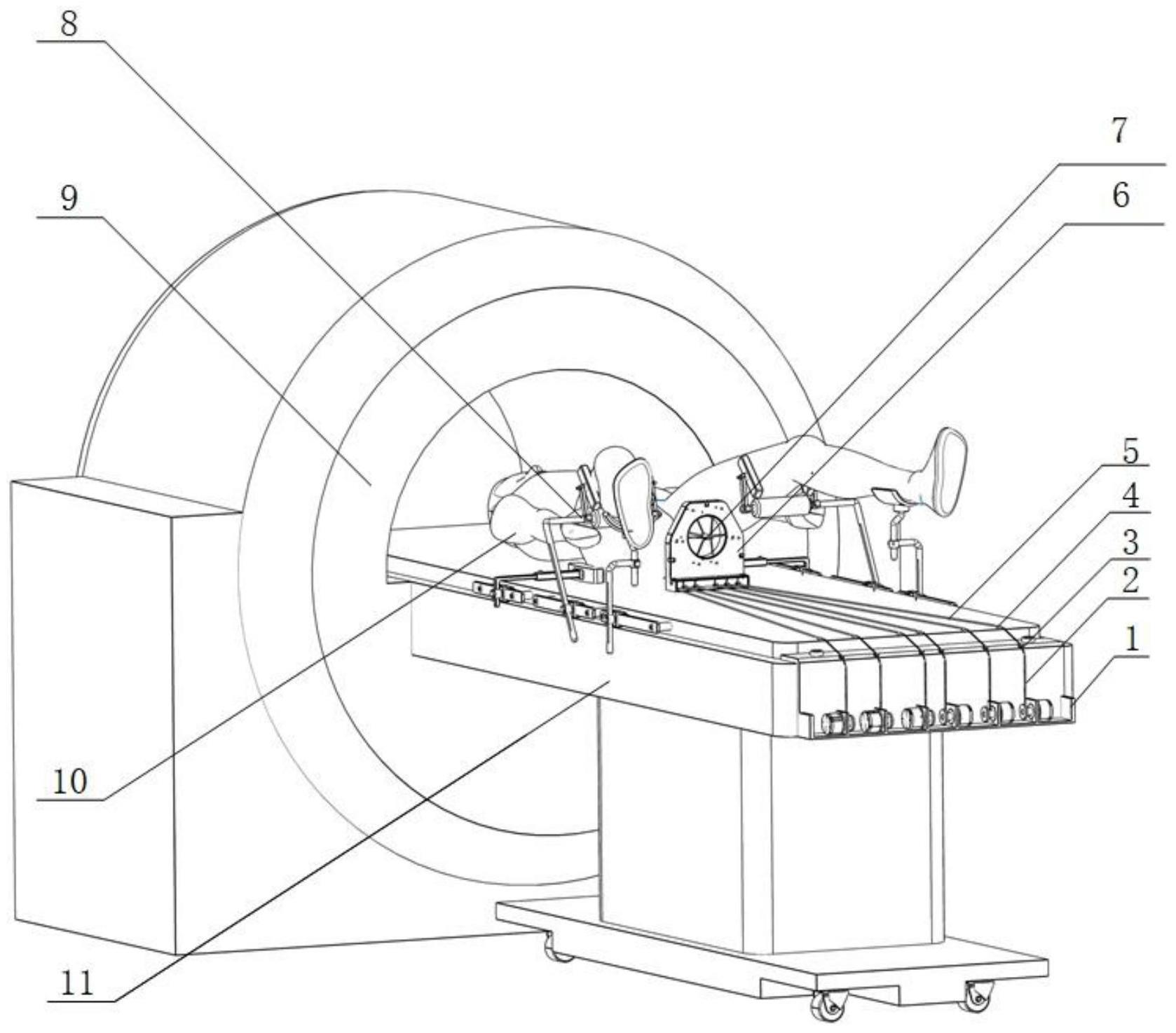
2、本发明提出了一种柔索驱动核磁兼容前列腺穿刺手术机器人,包括柔索驱动单元(1)、柔索(2)、滑轮组(3)、r型线夹(4)、套索(5)、穿刺机架(6)、穿刺装置(7)、身体支撑机构(8)。患者躺在床面上,身体支撑机构(8)固定患者下肢和胯部,柔索驱动单元(1)置于核磁共振仪外部,穿刺机架(6)、穿刺装置(7)置于核磁共振仪内部,柔索(2)从远离核磁共振仪一端的柔索驱动单元(1)中输出,通入固定在柔索驱动单元(1)上的滑轮组(3)中,核磁共振床床面部分采用套索(5)传动,套索(5)一端通过r型线夹(4)固定在床面上,一端通过r型线夹(4)固定在穿刺机架(6)中,穿刺机架(6)在床面上的位置可调,调整穿刺机架(6)的位置使穿刺装置(7)满足不同的穿刺深度要求,用螺钉将穿刺机架(6)固定在核磁共振床床面上,穿入穿刺机架(6)中的柔索(2)通过固定在穿刺机架(6)中的滑轮组(3)的导向后从穿刺机架(6)中输出,柔索(2)穿出后末端与穿刺装置(7)连接,六条柔索(2)分别间隔交错连接在穿刺装置(7)的前端点和后端点,在柔索(2)的牵引下,穿刺装置(7)实现三个方向上的移动以及除自身轴线外两个方向上的转动。
3、柔索驱动单元(1)置于核磁共振仪外部,电机安装板(1-1)固定于远离核磁共振仪一端的核磁共振床床面上,六个驱动电机(1-2)均匀对称固定于电机安装板(1-1)上,柔索(2)均匀缠绕在线轮(1-3)上,线轮(1-3)通过螺钉与驱动电机(1-2)的输出法兰盘连接,柔索(2)从线轮(1-3)输出后,引入安装在电机安装板(1-1)上的滑轮组(3)中。
4、滑轮组(3)分成两部分,分别均匀对称布置在柔索驱动单元(1)和穿刺机架(6)中,柔索(2)从线轮(1-3)输出后,依次引到对应的滑轮(3-2)上,滑轮(3-2)由塞打螺栓(3-1)固定在滑轮基座(3-4)上,滑轮基座(3-4)分别固定在柔索驱动单元(1)和穿刺机架(6)中。
5、套索(5)由r型线夹(4)一端固定在床面上,一端固定在穿刺机架(6)中,从柔索驱动单元(1)输出的柔索(2),经过滑轮组(3)的光滑导向后,穿入固定在床面上的套管(5-2)中,套管(5-2)两端由闸线头(5-1)压紧,闸线头(5-1)大头直径比r型线夹(4)线孔直径大,从而限制套管(5-2)的轴向移动。
6、穿刺机架(6)置于核磁共振仪内部的核磁共振床床面上,核磁共振床上开有螺纹孔,调节穿刺机架(6)位置使穿刺装置(7)满足穿刺深度,用螺钉将穿刺机架(6)固定在床面上,机架箱(6-1)和机架盖板(6-2)通过机架装配卡扣(6-3)固定,机架箱(6-1)中安装有滑轮组(3)和r型线夹(4),导轮(6-4)由塞打螺栓(6-5)安装在穿刺机架(6)中,瓷眼定位板(6-7)固定在机架箱(6-1)上,瓷眼定位板(6-7)上均匀对称分布六个定位孔,瓷眼(6-8)塞入定位孔中,柔索(2)从套管(5-2)中穿出后,经过滑轮组(3)和导轮(6-4)光滑导向后,从瓷眼(6-8)中穿出,然后分别交错间隔连接在穿刺装置(7)的前端点和后端点上。
7、活检穿刺针(7-1)通过螺纹连接于穿刺针针体(7-2)前端,滚花螺母(7-3)安装于穿刺针针体(7-2)后端,从瓷眼(6-8)穿出的六根柔索(2)分别交错间隔连接在穿刺针针体(7-2)的前端点和后端点上,穿刺针(7-1)和穿刺针针体(7-2)将连接在前端点上三根的柔索(2)夹紧,穿刺针针体(7-2)与滚花螺母(7-3)将连接在后端点上的三根柔索(2)夹紧,通过控制六根柔索(2)的收缩与伸长从而实现穿刺装置(7)在三个方向上的移动以及除自身轴线方向外两个方向上的转动。
8、身体支撑机构(8)固定支撑患者下肢与胯部,患者躺于核磁共振床床面上,小腿支架(8-1)、大腿支架(8-2)分别支撑患者小腿和大腿,大腿支架两侧软垫限制患者大腿的左右移动,调节胯部支架(8-3)位置将患者胯部夹紧固定,使患者在核磁共振床上位置固定。
9、本发明与现有技术相比,其有益效果具体如下:
10、(1)本发明中柔索驱动单元置于核磁共振仪外部,避免了核磁干涉,手术执行端包括穿刺机架、穿刺装置置于核磁共振仪内部,置于核磁共振仪内部装置均采用不含铁磁性的材料制成,具有核磁兼容性,对成像效果不产生影响。
11、(2)本发明中核磁共振床床面部分采用套索结构传动,采用套管保护柔索,避免因为人为因素干涉柔索的传动,提高了手术的执行精度,并且通过r型线夹将六根套索呈扇形均匀对称布置在核磁共振床床面上,避免了柔索之间的相互干涉,防止缠绳、压绳现象的发生。
12、(3)本发明中核磁共振仪内部的穿刺机架距离进针点矢状面之间的距离可调,从而可以调节穿刺针满足各种深度的穿刺要求,同时穿刺机架采用薄板结构装配而成,使整体结构更加简单、紧凑。
13、(4)本发明中采用身体支撑机构固定支撑患者下肢和胯部,限制患者在手术过程中的移动,保证手术机器人、患者、核磁图像三者之间位置配准,保证穿刺位置准确性。
14、(5)本发明中采用柔索控制穿刺针的穿刺动作,并且采用冗余驱动的方式,解决了现有传统刚性机器人因为电机、减速器等装置安装在机器人关节位置,造成的低负载自重比的问题,并且柔索具有缓冲吸震的作用,提高了手术执行装置的可靠性与柔顺性。
15、(6)本发明中在柔索布置路线上采用滑轮组和导轮组进行大转角光滑转向,并且在柔索穿出位置采用瓷眼,减小了柔索上受到的摩擦力,使柔索传递的拉力能更加有效的来驱动穿刺装置。
- 还没有人留言评论。精彩留言会获得点赞!