一种多自由度的水平机械臂的制作方法
本发明涉及医疗器械,特别是涉及一种多自由度的水平机械臂。
背景技术:
1、目前微型手术机器人支撑所用到的机械臂一般是万向臂,该类型机械臂关节采用球头关节,球头关节依靠零件的摩擦力维持关节的稳定性,这种依靠摩擦力而获得的关节锁紧力有限,在工作过程中受到冲击时极难保持原有位置,其稳定性大大降低。且由于各个关节具有较多的自由度,使得在使用过程中需要移动机器人位置时不得不全程托举机器人本体以及机械臂本体,否则在关节解锁以后整个系统将会因重力作用而向下掉落。而且,这种依靠托举来移动整体位置的方式会使得整体操作非常的不方便,医务人员的负担较重,系统的风险性很高。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种多自由度的水平机械臂,将机械臂主体限制在水平范围内,在受到外力冲击时能搞保持位置不变,具有极高的稳定性。
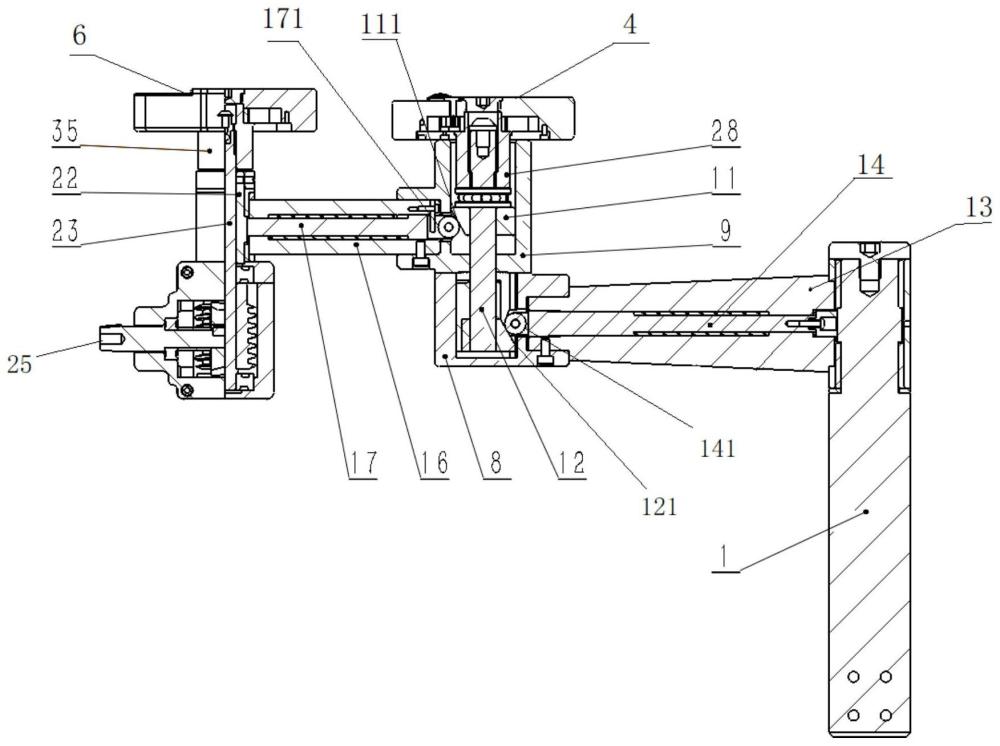
2、本发明提供的一种多自由度的水平机械臂,包括立柱、机械臂、旋转机构及锁紧机构;其中,机械臂包括第一支臂和第二支臂,所述第一支臂的一端连接所述立柱,所述第二支臂的一端连接所述旋转机构,所述锁紧机构用于控制所述第一支臂和所述第二支臂处于锁紧状态或可调节状态;在锁紧状态,所述第一支臂、所述立柱、所述第二支臂不能发生相对运动;在所述可调节状态,所述第一支臂与所述第二支臂在垂直于所述立柱的平面上转动。
3、在一个实施例中,所述锁紧机构包括锁紧螺母、第一顶块、第二顶块、第一齿盘、及第二齿盘;其中:
4、所述第一齿盘与所述第二齿盘通过齿轮啮合连接,所述第一齿盘内部有第一齿盘腔体,所述第二齿盘内部有第二齿盘腔体,所述锁紧螺母的至少部分设于所述第二齿盘腔体中;
5、所述第一顶块设于所述第二齿盘腔体中,所述第一顶块抵靠所述锁紧螺母,所述第一顶块设有第一顶块斜面;
6、所述第二顶块的至少部分设于所述第一齿盘腔体中,所述第二顶块的一端与所述锁紧螺母通过螺纹连接,所述第二顶块设有第二顶块斜面;
7、所述第一支臂靠近所述锁紧机构的一端抵靠所述第二顶块斜面,所述第二支臂靠近所述锁紧机构的一端抵靠所述第一顶块斜面。
8、在一个实施例中,所述第一顶块斜面与所述立柱之间的倾斜角度为20°~60°,优选为30°~50°。
9、在一个实施例中,所述第二顶块斜面与所述立柱之间的倾斜角度为20°~60°,优选为30°~50°。
10、在一个实施例中,在所述锁紧状态,所述第一支臂与所述立杆通过齿轮啮合连接,所述第二支臂与所述旋转机构通过齿轮啮合连接。
11、在一个实施例中,所述第一支臂包括所述第一支臂主体和第一顶杆,所述第一顶杆设于所述第一支臂主体的内部,所述第一顶杆靠近所述锁紧机构的一端设有第一滚轮,所述第一滚轮抵靠所述第二顶块斜面。
12、在一个实施例中,所述第二支臂包括所述第二支臂主体和第二顶杆,所述第二顶杆设于所述第二支臂主体的内部,所述第二顶杆靠靠近所述锁紧机构的一端设有第二滚轮,所述第二滚轮抵靠所述第一顶块斜面。
13、在一个实施例中,在所述锁紧状态,所述第一顶杆与所述立柱通过齿轮啮合连接,所述第二顶杆与所述旋转机构通过齿轮啮合连接。
14、在一个实施例中,所述第一顶杆与所述第一支臂主体通过方形齿轮或者定位块连接。
15、在一个实施例中,所述第二顶杆与所述第二支臂主体通过方形齿轮或者定位块连接。
16、在一个实施例中,所述第一支臂主体与所述第一顶杆之间设有第一弹簧,所述第一弹簧的一端抵靠所述第一支臂主体,另一端抵靠第一顶杆,所述第一弹簧的轴线平行于所述第一顶杆的轴线。
17、在一个实施例中,所述第二支臂主体与所述第二顶杆之间设有第二弹簧,所述第二弹簧的一端抵靠所述第二支臂主体,另一端抵靠所述第二顶杆,所述第二弹簧的轴线平行于所述第二顶杆的轴线。
18、在一个实施例中,所述锁紧机构还包括第一手柄,所述第一手柄与所述锁紧螺母固定连接,所述第一手柄上设有旋转限位机构。
19、在一个实施例中,所述旋转限位机构包括拨块、拨杆、棘爪、及第一棘轮,所述第一棘轮固定设置于所述锁紧螺母的外表面,所述拨块为凸轮或者类似凸轮的多边形,所述拨块与所述拨杆固定连接,所述拨杆用于带动所述拨块转动,所述棘爪的一端面抵靠所述拨块,相对的另一端面通过弹簧抵靠所述第一手柄,所述棘爪用于限制所述第一棘轮的旋转方向。
20、在一个实施例中,所述旋转机构包括定位轴、输入轴、输出轴;其中,所述定位轴通过齿轮与所述第二支臂啮合,所述输入轴设于所述定位轴的内部,所述输入轴和所述输出轴通过蜗轮蜗杆连接。
21、在一个实施例中,所述旋转机构还包括第二手柄,所述第二手柄连接所述定位轴。
22、在一个实施例中,在所述锁紧状态,所述第二顶杆与所述定位轴通过齿轮啮合连接。
23、与现有技术相比,本发明具有如下的有益效果:
24、1,本发明提供的多自由度的水平机械臂,通过锁紧机构的设置使第一支臂和第二支臂能够处于锁紧状态和可调节状态,在锁紧机构处于锁紧状态时,第一支臂和第二支臂分别通过齿轮与其他部件相啮合,此时即使收到外力冲击也不会发生相对移动或转动,稳定性高,在锁紧机构处于可调节状态时,第一支臂和第二支臂可以在水平面上转动,使机械臂的末端能够达到其所在平面上的任意位置,而且不会因为重力或其他外力作用使得机械臂脱离该平面,避免了由于重力作用影响对病人造成伤害,极大地提高了系统的稳定性。
25、2、在手术过程中,微型手术机器人需要移动时,仅需拖动整体机械臂系统即可,无需费力托举,降低了医生的负担,提高了操作的方便性。
26、3、通过锁紧机构的一次调节,即可实现第一支臂与立柱、第一支臂与第二支臂、第二支臂与旋转机构等多个部件之间的锁紧或解锁,操作简单方便。
27、4、旋转机构的设置,能够通过控制输入轴的旋转角度来调整微型机器人相对于水平面的倾斜角度,使得微型机器人能够以多种姿态达到所需的任意工作位置,增加了整个系统的适应性和实用性。
28、5、在第一支臂设置了第一顶杆、第一弹簧,及第二支臂设置了第二顶杆、第二弹簧的情况下,锁紧机构从锁紧状态转换到可调节状态时,第一支臂与立柱、第二支臂与旋转机构之间的连接能够在弹簧的作用下自动解除,增加了机械臂调节的便捷性。
技术特征:
1.一种多自由度的水平机械臂,其特征在于,包括立柱、机械臂、旋转机构及锁紧机构;其中,机械臂包括第一支臂和第二支臂,所述第一支臂的一端连接所述立柱,另一端连接所述锁紧机构,所述第二支臂的一端连接所述锁紧机构,另一端连接所述旋转机构;所述锁紧机构用于控制所述第一支臂和所述第二支臂处于锁紧状态或可调节状态;在锁紧状态,所述第一支臂、所述立柱、所述第二支臂不能发生相对运动;在所述可调节状态,所述第一支臂与所述第二支臂在垂直于所述立柱的平面上转动。
2.根据权利要求1所述的多自由度的水平机械臂,其特征在于,所述锁紧机构包括锁紧螺母、第一顶块、第二顶块、第一齿盘、及第二齿盘;其中:
3.根据权利要求2所述的多自由度的水平机械臂,其特征在于,所述第一顶块斜面与所述立柱之间的倾斜角度为20°~60°;所述第二顶块斜面与所述立柱之间的倾斜角度为20°~60°。
4.根据权利要求2所述的多自由度的水平机械臂,其特征在于,在所述锁紧状态,所述第一支臂与所述立杆通过齿轮啮合连接,所述第二支臂与所述旋转机构通过齿轮啮合连接。
5.根据权利要求2所述的多自由度的水平机械臂,其特征在于,所述第一支臂包括所述第一支臂主体和第一顶杆,所述第一顶杆设于所述第一支臂主体的内部,所述第一顶杆靠近所述锁紧机构的一端设有第一滚轮,所述第一滚轮抵靠所述第二顶块斜面;所述第二支臂包括所述第二支臂主体和第二顶杆,所述第二顶杆设于所述第二支臂主体的内部,所述第二顶杆靠近所述锁紧机构的一端设有第二滚轮,所述第二滚轮抵靠所述第一顶块斜面。
6.根据权利要求5所述的多自由度的水平机械臂,其特征在于,在所述锁紧状态,所述第一顶杆与所述立柱通过齿轮啮合连接,所述第二顶杆与所述旋转机构通过齿轮啮合连接。
7.根据权利要求5所述的多自由度的水平机械臂,其特征在于,所述第一支臂主体与所述第一顶杆之间设有第一弹簧,所述第一弹簧的一端抵靠所述第一支臂主体,另一端抵靠第一顶杆,所述第一弹簧的轴线平行于所述第一顶杆的轴线;所述第二支臂主体与所述第二顶杆之间设有第二弹簧,所述第二弹簧的一端抵靠所述第二支臂主体,另一端抵靠所述第二顶杆,所述第二弹簧的轴线平行于所述第二顶杆的轴线。
8.根据权利要求2~7中任意一项所述的多自由度的水平机械臂,其特征在于,所述锁紧机构还包括第一手柄,所述第一手柄与所述锁紧螺母固定连接,所述第一手柄上设有旋转限位机构。
9.根据权利要求8所述的多自由度的水平机械臂,其特征在于,所述旋转限位机构,包括拨块、拨杆、棘爪、及第一棘轮,所述第一棘轮固定设置于所述锁紧螺母的外表面,所述拨块为凸轮或者类似凸轮的多边形,所述拨块与所述拨杆固定连接,所述拨杆用于带动所述拨块转动,所述棘爪的一端面抵靠所述拨块,相对的另一端面通过弹簧抵靠所述第一手柄,所述棘爪用于限制所述第一棘轮的旋转方向。
10.根据权利要求2~7中任意一项所述的多自由度的水平机械臂,其特征在于,所述旋转机构包括定位轴、输入轴、输出轴;其中,所述定位轴通过齿轮与所述第二支臂啮合,所述输入轴设于所述定位轴的内部,所述输入轴和所述输出轴通过蜗轮蜗杆连接。
技术总结
本发明提供了一种多自由度的水平机械臂,包括立柱、机械臂、旋转机构及锁紧机构;其中,机械臂包括第一支臂和第二支臂,所述第一支臂的一端连接所述立柱,另一端连接所述锁紧机构,所述第二支臂的一端连接所述锁紧机构,另一端连接所述旋转机构;所述锁紧机构用于控制所述第一支臂和所述第二支臂处于锁紧状态或可调节状态;在锁紧状态,所述第一支臂、所述立柱、所述第二支臂不能发生相对运动;在所述可调节状态,所述第一支臂与所述第二支臂在垂直于所述立柱的平面上转动。该机械臂能够达到其所在平面上的任意位置,不会因为重力或其他外力作用使得机械臂脱离该平面,避免给病患造成额外伤害,手术过程无需费力托举,稳定性高,操作方便。
技术研发人员:曾建军,马科威,刘传栋,田志杰
受保护的技术使用者:上海嘉奥信息科技发展有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!