基于肌腱驱动的刚柔耦合变刚度仿生结构假肢手
本发明属于假肢,具体为一种基于肌腱驱动的刚柔耦合变刚度仿生结构假肢手。
背景技术:
1、近年来假肢技术虽然有了很大发展,但假肢手拒用和弃用率仍然很高。人手灵巧柔顺的运动控制功能得益于其独特的肌骨力学结构。因此,仿人手结构是提高假肢手灵巧操作的重要途径。传统的假肢手主要以刚性结构为主,使得假肢手在操作时存在适应性以及安全性不足的问题,尤其当抓取一些易碎物品时,容易对物品造成损坏。随着柔性材料的出现,柔性灵巧手逐渐发展起来,与传统的刚性假肢手相比,软体手具有自适应性强、安全性高等特点,尤其是对一些不规则物体或者易碎物体的抓取具有较大的优势,但普遍由于自身刚度低,使得其不能对物体进行稳定或精准的抓取。
2、相比于传统的刚性假肢手和纯柔性假肢手,变刚度假肢手可以根据不同的操作对象与操作环境,自主地进行刚度调节,使自身以最合适的刚度去完成抓取任务,极大提升了假肢手的操作功能。目前假肢手的变刚度通常是通过特殊材料来实现的,如形状记忆合金,磁流变液/弹性体,电活性聚合物等等,或者是采用气压驱动,通过改变气压大小来实现刚度变化,但是前者需要额外的驱动装置,变刚度复杂,能耗大,后者变刚度范围小,响应速度慢。
3、此外,现有假肢手结构还存在以下不足:1)大拇指的结构不够灵活细致,掌指关节“内收/外展”运动角度不能连续可调,无法与多个手指指尖完成对捏、对握等重要动作;2)手指结构上的预紧元件往往采用半刚性或弹性元件,占用体积较大且容易产生疲劳磨损。单一的结构类型相较于耦合结构限制了假肢手的适用范围,且会增加其使用成本;3)驱动方式通常采用的是齿轮或者连杆驱动,难以复现人手肌腱驱动的生物力学特性,且导致假肢手的体积相对较大,不够紧凑,且增加了整体重量,给使用者带来不必要的重量负担;4)从加工制作过程上看,现有假肢手的设计不具备分层式结构,零部件相对整体化,结构较复杂,且没有互换性,制作成本和维护成本较高。
技术实现思路
1、本发明的目的是针对以上问题,提供一种基于肌腱驱动的刚柔耦合变刚度仿生结构假肢手。
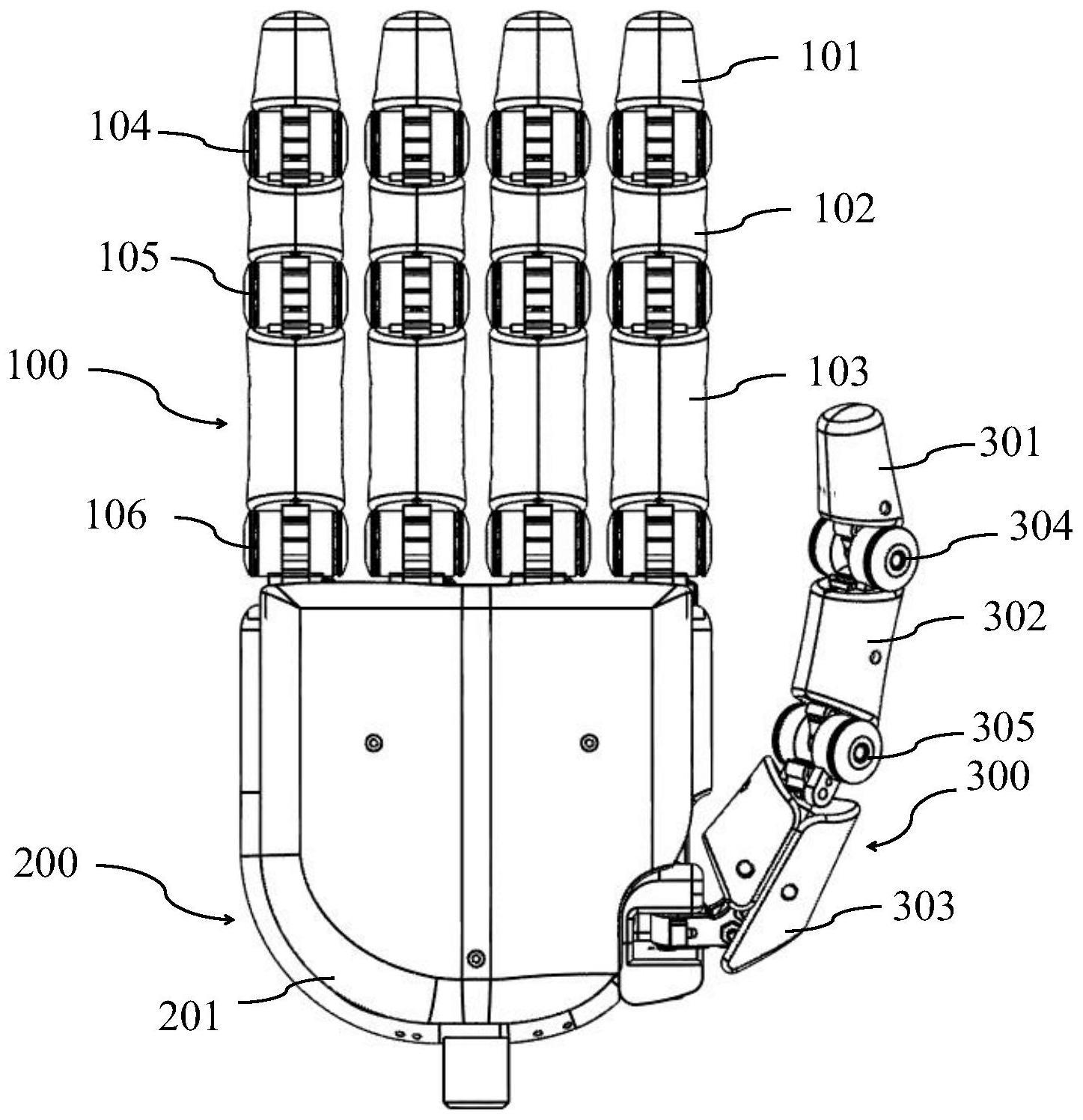
2、为实现以上目的,本发明采用的技术方案是:一种基于肌腱驱动的刚柔耦合变刚度仿生结构假肢手,包括四指部,拇指部和手掌部;
3、所述四指部的各手指的前后面分别连接有一根第一驱动线,所述四指部的各手指通过第一驱动线控制其弯曲和伸展;
4、所述拇指部的前后分别连接有一根第二驱动线,所述拇指部通过第二驱动线控制其弯曲和伸展,所述拇指部与所述手掌部转动连接;
5、所述四指部的各手指的关节处设置有关节连接件;所述拇指部的拇指远指骨和拇指近指骨通过关节连接件连接,所述拇指部的拇指近指骨与所述拇指掌骨依次通过角度转换器和关节连接件连接,所述拇指部的拇指近指骨与拇指掌骨之间的活动通过第三驱动线牵引所述角度转换器控制;
6、各手指的关节处的上下指骨之间连接有柔性材料的肌腱,所述肌腱用于提供各手指保持微弯曲的初始状态的预紧力。
7、在一种可能的实现方式中,所述四指部的各手指分别包括四指远指骨、四指中指骨和四指近指骨;所述手掌部包括掌板、四指掌骨以及拇指掌骨,所述四指掌骨固定在所述掌板的四指对应位置,所述拇指掌骨与所述掌板的拇指连接位置转动连接;
8、所述四指远指骨的下端与所述四指中指骨的上端通过第一关节连接件连接,所述四指中指骨的下端与所述四指近指骨的上端通过第二关节连接件连接,所述四指近指骨的下端与所述四指掌骨的上端通过第三关节连接件连接,所述第一驱动线依次连接所述四指远指骨、四指中指骨和四指近指骨后连接至外部驱动装置;所述拇指远指骨的下端与所述拇指近指骨的上端通过第四关节连接件连接,所述拇指近指骨的下端与角度转换器的上端通过第五关节连接件连接,所述角度转换器的下端和拇指掌骨的上端通过第六关节连接件连接;
9、所述四指远指骨与四指中指骨连接的关节处的前后分别通过一根第一肌腱连接;所述四指中指骨与四指近指骨连接的关节处的前后分别通过一根第二肌腱连接;所述四指近指骨与四指掌骨连接的关节处的前后分别通过一根第三肌腱连接;所述拇指远指骨和拇指近指骨连接的关节处的前后分别通过一根第四肌腱连接;所述拇指近指骨和角度转换器连接的关节处的前后分别通过一根第五肌腱连接;所述角度转换器和拇指掌骨连接的关节处的前后分别通过一根第六肌腱连接。
10、在一种可能的实现方式中,所述四指远指骨的上端设置为自由端,其下端的前后面固定有对称设置的第一连接轴,所述四指远指骨下端两侧对称设置有第一肌腱连接槽;
11、所述四指中指骨的上端的两侧对称设置有第二肌腱连接槽,其下端的前后面固定有对称设置的第二连接轴,在所述四指中指骨下端两侧对称设置有第三肌腱连接槽;
12、所述四指近指骨的上端的两侧对称设置有第四肌腱连接槽,其下端的前后面固定有对称设置的第三连接轴,在所述四指近指骨下端两侧对称设置有第五肌腱连接槽;
13、所述四指掌骨的上端两侧对称设置有第六肌腱连接槽,其下端通过紧固件固定在所述掌板上;
14、所述拇指远指骨的上端设置为自由端,其下端的前后面固定有对称设置的第四连接轴,在所述拇指远指骨下端两侧对称设置有第七肌腱连接槽;
15、所述拇指近指骨的上端的两侧对称设置有第八肌腱连接槽,其下端的前后面固定有对称设置的第五连接轴,在所述中指骨下端两侧对称设置有第九肌腱连接槽;
16、所述角度转换器包括连接板,所述连接板的两侧设置有第十肌腱连接槽,所述连接板固定在连接杆的顶部,在所述连接杆上对称设置有第一穿线板,两个所述第一穿线板上分别设置有一个第一穿线孔;所述连接杆的底端的前后面对称设置有第六连接轴,在所述连接杆的底端的两侧面对称设置有第十一肌腱连接槽;所述拇指掌骨的上端两侧设置有第十二肌腱连接槽;
17、同一侧的第一肌腱连接槽和第二肌腱连接槽通过第一肌腱连接,同一侧的第三肌腱连接槽和第四肌腱连接槽通过第二肌腱连接;同一侧的第五肌腱连接槽和第六肌腱连接槽通过第三肌腱连接;同一侧的第七肌腱连接槽和第八肌腱连接槽通过第四肌腱连接,同一侧的第九肌腱连接槽和第十肌腱连接槽通过第五肌腱连接;同一侧的第十一肌腱连接槽和第十二肌腱连接槽通过第六肌腱连接。
18、在一种可能的实现方式中,所述连接板与穿线板成15°夹角设置,所述第一穿线板与所述第六连接轴成90°夹角设置。
19、在一种可能的实现方式中,各肌腱外形结构相同,各肌腱两端设置有端头,所述端头卡设在对应的肌腱连接槽内。
20、在一种可能的实现方式中,所述拇指掌骨包括弯板座和连接块,所述弯板座的一端内设置有齿圈,所述齿圈啮合有齿轮,所述齿轮固定在转动电机的输出轴上,所述转动电机固定在所述掌板的外壳上;所述弯板座可转动连接在所述掌板的外壳上;所述弯板座的另一端与所述连接块固定连接,所述第十二肌腱连接槽设置在所述连接块的上端。
21、在一种可能的实现方式中,各关节连接件结构相同,均包括对称设置在关节两侧的关节转动组件;所述关节转动组件包括限位座和限位片;
22、所述限位座的朝外侧面开设有沉孔,在所述沉孔的壁面上形成有朝向圆心的扇形凸起;在所述沉孔底面中心设置有轴孔;
23、所述限位片形状为一个大半圆和一个小半圆共圆心的组合结构,其中小半圆的半径与扇形凸起的内径相等,大半圆的半径与沉孔外径相等,在限位片上形成扇形缺口,在所述限位片的中心贯穿设置有限位孔;
24、各连接轴的端部设置有定位缺口,所述连接轴穿过限位座的轴孔后所述定位缺口与所述限位片的限位孔的匹配,所述连接轴转动时带动所述限位块同步转动;所述限位块嵌设在所述沉孔内且所述扇形凸起设置在所述扇形缺口内;
25、所述限位座的外壁上固定有连接支耳,第一关节连接件的连接支耳与所述四指中指骨的上端固定;第二关节连接件的连接支耳与所述四指近指骨的上端固定;第三关节连接件的连接支耳与所述四指掌骨的上端固定;第四关节连接件的连接支耳与所述拇指近掌骨的上端固定;第五关节连接件的连接支耳与所述角度转换器的连接板固定;第六关节连接件的连接支耳与所述拇指掌骨的上端固定。
26、在一种可能的实现方式中,各所述连接轴的端面均设置有螺纹孔,所述限位座的封盖通过螺钉穿过并与所述螺纹孔配合以实现固定。
27、在一种可能的实现方式中,还包括外壳,所述外壳包括四指远指骨外壳、四指中指骨外壳和四指近指骨外壳,拇指远指骨外壳、拇指近指骨外壳、拇指掌骨外壳以及掌板外壳;
28、各外壳均包括面壳和背壳,其中四指远指骨外壳、四指中指骨外壳和四指近指骨外壳、拇指远指骨外壳、拇指近指骨外壳在面壳和背壳的相对面上形成有相对设置的掌骨安装槽和设置在掌骨安装槽两侧的驱动线槽;
29、四指部各手指的所述第一驱动线设置在所述四指远指骨外壳、四指中指骨外壳和四指近指骨外壳的同侧的驱动线槽内;所述第二驱动线设置在拇指近指骨外壳内。
30、在一种可能的实现方式中,在所述四指中指骨外壳、四指近指骨外壳、拇指近指骨外壳内的掌骨安装槽两侧对称设置有轴承槽,在所述轴承槽内安装有引导轴承;所述第一驱动线和第二驱动线通过对应引导轴承引导后连接至外部的直线驱动装置。
31、本发明的有益效果:
32、1、刚柔耦合结构整合了刚性元件和柔性元件两者的优点,提升了假肢手变刚度能力,增强了其运动控制功能。
33、2、刚柔耦合结构与线驱动的配合使手指各指节的运动耦合化,高度模拟人手结构特点,可更好得复现人手肌骨力学功能。
34、3、刚柔耦合结构、肌腱驱动与内外两根驱动线的运动关联使假肢手具备变刚度特性,更容易适应不同的工作环境和任务需求,降低结构重量,提高了运动效率,增强了假肢手的自适应性。
35、4、大拇指结构有四个自由度,还原了大拇指掌骨关节处的外展/内收自由度,且使大拇指与手指间形成对向角度,还原大拇指在人手中的动作特性与外形形态,多自由度与对向角度的设计,如其运动更加灵活多变,大拇指与手指之间在相互协作过程中更加紧密和配合,增加协调性,使手部活动更加精细、高效。
- 还没有人留言评论。精彩留言会获得点赞!