一种基于VR的视力检测方法及装置、智能眼镜与流程
本发明涉及智能眼镜领域,尤其涉及一种基于vr的视力检测方法及装置、智能眼镜。
背景技术:
1、智能眼镜有许多中,主要包括主流的vr眼镜、眼动跟踪仪。眼动跟踪是一个识别某人在看什么、怎么看的过程,已广泛应用于人机交互、虚拟现实、车辆辅助驾驶、人因分析和心理研究等多个领域。从眼球的生理结构来说,人类主要通过中央凹区域来获取视觉数据,中央凹只能提供约1–2度的视角。虽然该区域仅占视野范围的极□部分,但通过此区域记录的信息却包含了通过视觉神经传递到□脑的有效视觉信息的50%。因此,人类的视觉和注意系统围绕着一个主要目标工作:使感兴趣的目标的光学成像聚焦于中央凹处。这是眼动行为最根本,最主要的原因。
2、在社会中,出于用眼不当、用眼疲劳等原因,越来越多人近视。人们在检测视力时,一般是去眼科医院或眼镜店检测,检测时使用视力对照表。人们去检测视力,一般是抱着购买眼镜的目的的,若单纯地想测试视力,专门去医院或眼镜店似乎过于麻烦。
技术实现思路
1、鉴于以上技术问题,本发明提供了一种基于vr的视力检测方法及装置、智能眼镜,以提供一种可以随时随地检测视力的技术方案。
2、本公开的其他特征和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
3、根据本发明的一方面,公开一种基于vr的视力检测方法,所述方法包括:
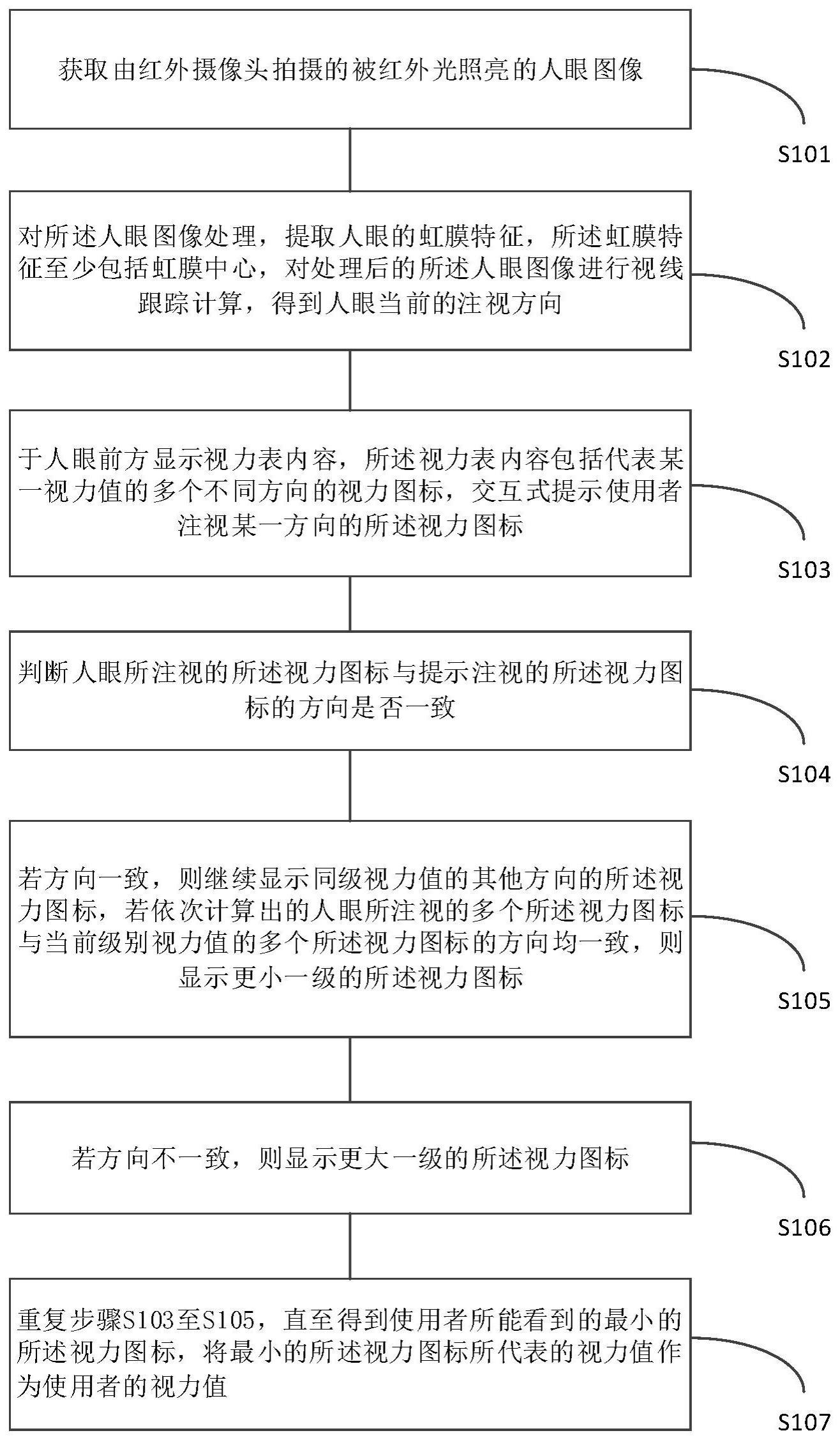
4、获取由红外摄像头拍摄的被红外光照亮的人眼图像;
5、对所述人眼图像处理,提取人眼的虹膜特征,所述虹膜特征至少包括虹膜中心,对处理后的所述人眼图像进行视线跟踪计算,得到人眼当前的注视方向;
6、于人眼前方显示视力表内容,所述视力表内容包括代表某一视力值的多个不同方向的视力图标,交互式提示使用者注视某一所述视力图标;
7、判断人眼所注视的所述视力图标与提示注视的所述视力图标的方向是否一致;
8、若所述注视方向与对应的所述视力图标的方向一致,则继续显示同级视力值的其他方向的所述视力图标,若依次计算出的所述注视方向与当前级别视力值的多个所述视力图标的方向均一致,则显示更小一级的所述视力图标;
9、若所述注视方向与对应的所述视力图标的方向不一致,则显示更大一级的所述视力图标;
10、重复上述方法,直至得到使用者所能看到的最小的所述视力图标,将最小的所述视力图标所代表的视力值作为使用者的视力值。
11、进一步的,所述对处理后的所述人眼图像进行视力跟踪计算,得到人眼当前的注视方向,包括:
12、提取所述人眼图像中的虹膜椭圆特征参数和眼角坐标,所述虹膜椭圆特征参数包括椭圆长轴、短轴、所述虹膜中心和倾角;
13、根据同一人眼的多个所述人眼图像中的伸缩虹膜椭圆特征参数和所述眼角坐标,标定出当前人眼的虹膜中心、虹膜半径及虹膜法向量,以计算得到角膜曲率中心;
14、根据所述虹膜中心和所述角膜曲率中心,得到人眼当前的所述注视方向。
15、进一步的,在对所述人眼图像处理时,具体包括:
16、对所述人眼图像预处理,所述预处理至少包括灰度化,预处理后的所述人眼图像中的虹膜部分被提取;
17、对预处理后的所述人眼图像中的深色虹膜部分进行霍夫圆检测,得到圆区域;
18、基于最小二乘法,以所述圆区域的最大圆的半径作为搜索半径,查找异色边缘,所述异色边缘为预处理后的所述人眼图像中的黑色像素和白色像素的交界;
19、基于所述异色边缘,得到所述虹膜特征,所述虹膜特征至少包括所述虹膜中心、虹膜半径、虹膜部分中的黑白像素比例、所述异色边缘对应的半径的标准差。
20、进一步的,在获得所述虹膜特征后,在接下来的多组所述人眼图像中跟踪所述虹膜中心,包括;
21、对基于最小二乘法获得的所述虹膜中心的位置随机分布处理样本;
22、将所述处理样本与所述虹膜特征相比较,计算得到每份所述样本的权重值;
23、对权重值高的所述样本进行加权,以及对重要性高的所述样本进行重采样和重新计算权重值,将权重值最高的所述处理样本作为新的所述虹膜中心。
24、进一步的,所述预处理具体包括:
25、对所述人眼图像进行灰度化;
26、基于自动多级阈值技术,获取灰度化后的所述人眼图像的阈值区域;
27、对所述阈值区域进行腐蚀运算,以使得所述阈值区域内的暗部分放大;
28、对腐蚀运算后的所述阈值区域进行膨胀运算,以使得所述阈值区域内的亮部分放大,得到所述人眼图像中的深色虹膜部分。
29、进一步的,在使用自动多级阈值技术来获取阈值区域时,具体包括:
30、将灰度化后的所述人眼图像均匀化为直方图;
31、进行至少两次自动多级阈值处理,以自动确认阈值;
32、采用sigmoid函数,对所述直方图进行重新分配,得到所述阈值区域。
33、进一步的,所述对处理后的所述人眼图像进行视线跟踪计算,得到人眼当前的注视方向,包括:
34、在人眼前方显示多个校正点;
35、在人眼依次凝视各个所述校正点时,计算对应拍摄到的所述人眼图像的所述虹膜中心;
36、将所述虹膜中心的坐标与所述校正点坐标关联映射,得到所述虹膜中心的坐标与所述校正点的校正关系;
37、根据所述校正关系和所述虹膜中心,得到所述注视方向。
38、进一步的,所述判断人眼所注视的所述视力图标与提示注视的所述视力图标的方向是否一致,包括:
39、将当前的所述注视方向在所述红外摄像头中的三维坐标系与所述视力图标的平面坐标系建立映射,得到所述注视方向在所述视力图标的平面坐标系的落点;
40、判断所述落点是否在提示注视的所述视力图标的触发范围内,若在,则判断为一致;
41、其中,同一等级的不同的所述视力图标具有四个方向。
42、根据本公开的第二方面,提供一种基于vr的视力检测装置,包括:图像获取单元,用于获取由红外摄像头拍摄的被红外光照亮的人眼图像;图像处理单元,对所述人眼图像处理,提取人眼的虹膜特征,所述虹膜特征至少包括虹膜中心,对处理后的所述人眼图像进行视线跟踪计算,得到人眼当前的注视方向;显示单元,用于在人眼前方显示视力表内容,所述视力表内容包括代表某一视力值的多个不同方向的视力图标,交互式提示使用者注视某一方向的所述视力图标;视力判断单元,判断人眼所注视的所述视力图标与提示注视的所述视力图标的方向是否一致;若方向一致,则继续显示同级视力值的其他方向的所述视力图标,若依次计算出的人眼所注视的多个所述视力图标与当前级别视力值的多个所述视力图标的方向均一致,则显示更小一级的所述视力图标;若方向不一致,则显示更大一级的所述视力图标;重复上述方法,直至得到使用者所能看到的最小的所述视力图标,将最小的所述视力图标所代表的视力值作为使用者的视力值。
43、根据本公开的第三方面,提供一种智能眼镜,包括:多个红外摄像头,分别指向左右两个人眼设置并且按照预设位置排列;红外泛光发射器,面向人眼设置;显示屏;一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述的基于vr的视力检测方法方法。
44、本公开的技术方案具有以下有益效果:
45、基于该方法,根据眼动跟踪和交互式操作,人们可以方便地使用具有摄像头的vr眼镜来检测视力,让人们更容易地了解自己的视力情况,尤其针对于青少年而言,更利于促使青少年保护视力。
- 还没有人留言评论。精彩留言会获得点赞!