手臂康复训练装置
本发明涉及人体上肢康复训练辅助设备,尤其涉及一种手臂康复训练装置。
背景技术:
1、对于上肢手臂瘫痪的患者,如果长期不做康复训练,手臂肌肉组织会产生组织水肿、粘连,肌肉萎缩等病症,严重影响关节的活动机能,造成彻底失去治愈机会,给患者生活上带来极大的痛苦和不便,传统的治疗方式是医师对患者进行人工手动训练,这种方式及其考验医师技术水平和经验,存在效率低,患者不能自主安排训练时间,成本较高,而且,训练效果也依赖于依赖于医师的技术经验和水平;
2、因此,基于上述问题,提供一种能够带动患者手臂进行康复运动的康复器械已成为目前亟待解决的技术问题;
技术实现思路
1、本发明的目的在于用于解决医师对患者进行人工手动进行手臂康复训练,存在效率低,患者不能自主安排训练时间,本较高,而且训练效果也依赖于依赖于医师的技术经验和水平的问题。
2、为了实现上述目的,本发明提供如下技术方案:
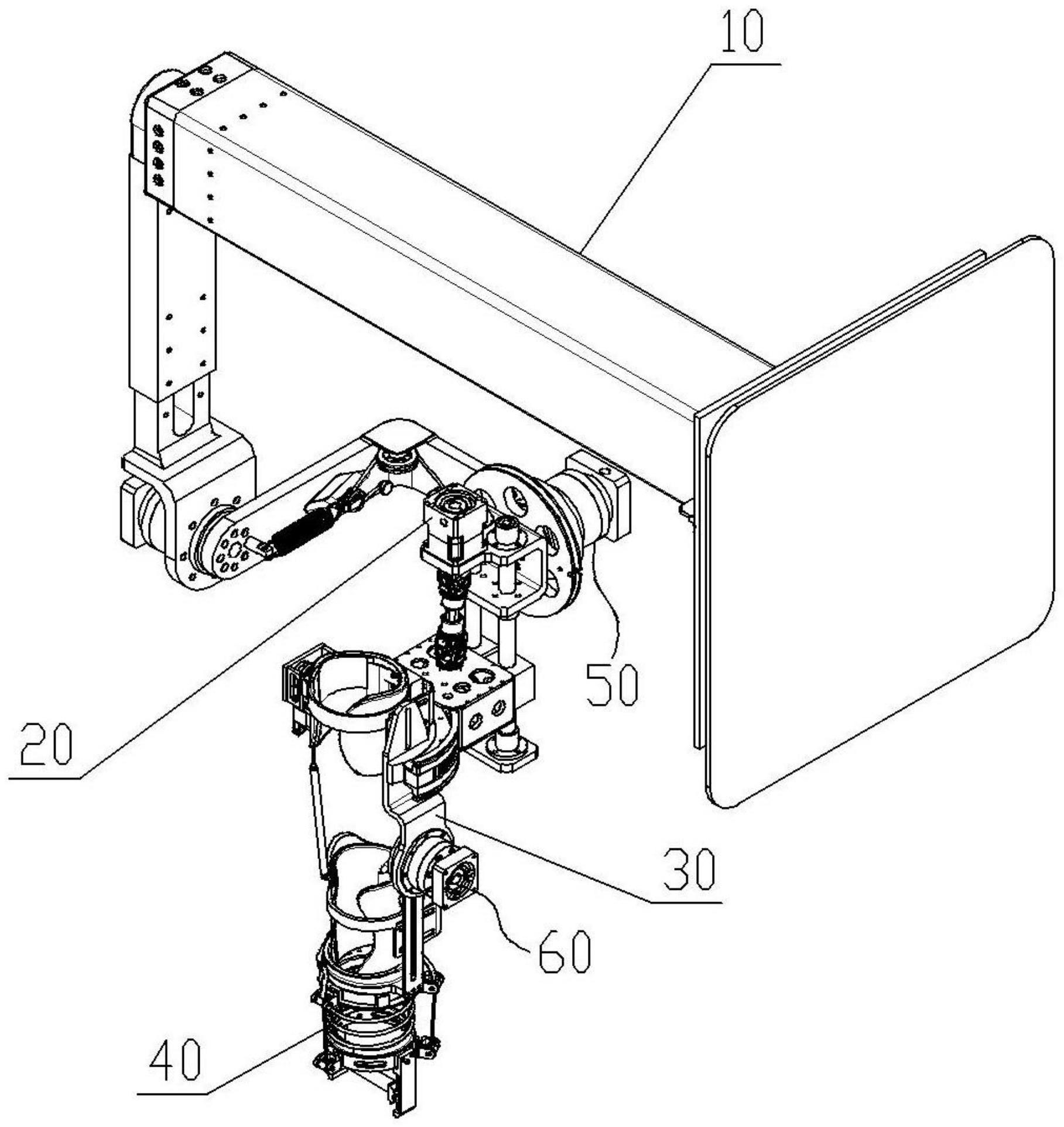
3、本发明公开的手臂康复训练装置,包括:
4、吊架,其位置固定;
5、肩部结构,其吊装于所述吊架上,所述肩部结构具有肩关节和能够绕所述肩关节做旋转运动的摆臂驱动机构;
6、肘部结构,其与所述摆臂驱动机构连接,且构造为跟随所述摆臂驱动机构运动而联动;
7、腕部结构,其用于接收手部,所述腕部结构与所述肘部结构连接,且构造为套装于手部外部并柔性支撑腕关节。
8、进一步的,所述吊架包括连接座和连接臂;
9、所述连接臂一端与所述连接座固定连接,另一端固连有伸缩杆结构的吊臂,所述吊臂通过驱动轴与所述肩部结构旋转连接。
10、进一步的,所述肩部结构包括构造呈l型结构的支臂;
11、所述支臂一端与所述吊架连接,另一端形成有所述肩关节;
12、所述摆臂驱动机构包括吊座和摆动轴;
13、所述吊座侧部连接有所述肘部结构;
14、所述摆动轴安装于所述肩关节内,所述摆动轴一端与所述吊座固定连接,另一端安装有驱动其旋转的电机。
15、进一步的,所述肩部结构还包括用于驱动上臂旋转的转臂驱动机构;
16、所述转臂驱动机构包括万向轴和驱动座;
17、所述吊座一侧竖直安装有能够旋转的所述万向轴,所述万向轴顶端与电机连接,所述万向轴底端固连有齿轮,所述吊座对应所述齿轮位置旋转连接有与所述肘部结构连接的驱动座,所述驱动座通过齿条与所述齿轮啮合。
18、进一步的,所述支臂内侧随型装设有上臂柔性拉筋机构,其用于提供拉力,以便带动手部力量训练。
19、进一步的,所述上臂柔性拉筋机构包括转轮、定滑轮和转向轮;以及
20、缠绕在所述转轮和所述定滑轮、所述转向轮上的拉力绳;
21、所述拉力绳一端与所述转轮固定连接,另一端与所述支臂固定连接;
22、所述摆动轴固连有所述转轮;
23、所述支臂l型拐角位置装设有所述转向轮,所述支臂位于所述转向轮和所述转轮之间的侧壁装设有所述定滑轮;还包括
24、挂装在所述拉力绳上的的涨紧轮,所述涨紧轮上连接有提供拉力的肩部弹簧,所述肩部弹簧末端与所述支臂钩挂连接。
25、进一步的,所述肘部结构包括与所述肩部结构连接的肘部吊臂;
26、所述肘部吊臂包括上吊臂和下吊臂、以及吊臂轴;
27、所述上吊臂下端旋转连接有所述吊臂轴,用于形成肘关节;
28、所述吊臂轴一端与所述下吊臂固定连接,另一端与电机连接;
29、所述下吊臂远离所述吊臂轴端形成有吊座,通过所述吊座与所述腕部结构连接;
30、所述下吊臂上固连有前臂套环,所述上吊臂顶端固连有上臂套环,所述上臂套环和所述前臂套环内均装设有柔性护套。
31、进一步的,所述肘部结构还包括肘部柔性拉筋机构,其用于提供拉力。
32、进一步的,所述腕部结构包括第一套环和第二套环、以及连接在所述第一套环和所述第二套环之间的弹性支撑筋;
33、所述第一套环上部与肘部结构固定连接,下部与所述弹性支撑筋连接;
34、所述第二套环上部与所述弹性支撑筋连接,所述第二套环两侧对称地固连有吊杆,且两个所述吊杆之间连接有握杆,用于手部抓握。
35、进一步的,两个所述吊杆相对的表面均布设有滑轨,通过所述滑轨与所述握杆端部的滑块滑动连接,且所述滑块侧壁安装有顶丝,通过顶丝锁定握杆和吊杆之间的位置。
36、在上述技术方案中,本发明提供的手臂康复训练装置,有益效果:
37、本发明设计的手臂康复训练装置,手臂康复训练装置中引入了肩部结构、肘部结构、腕部结构模拟手臂结构,在肩部结构的驱动下进行转动运动,肘部结构和腕部结构进行联动,实现带动手臂进行相应的康复训练,例如肌肉、关节和软组织等的各种方向的运动,诸如肩部的前/后摆动、内/外旋、屈肘、抬肩/落肩,以及带动手臂肌肉训练等,该装置各个部位动作灵活、柔顺性和安全性好,成本低,适于广泛应用于手部位的康复训练,手臂康复训练效果好。
技术特征:
1.手臂康复训练装置,其特征在于,包括:
2.根据权利要求1所述的手臂康复训练装置,其特征在于;
3.根据权利要求1所述的手臂康复训练装置,其特征在于;
4.根据权利要求3所述的手臂康复训练装置,其特征在于;
5.根据权利要求3所述的手臂康复训练装置,其特征在于;
6.根据权利要求5所述的手臂康复训练装置,其特征在于;
7.根据权利要求1所述的手臂康复训练装置,其特征在于;
8.根据权利要求7所述的手臂康复训练装置,其特征在于;
9.根据权利要求1所述的手臂康复训练装置,其特征在于;
10.根据权利要求9所述的手臂康复训练装置,其特征在于;
技术总结
本发明公开了一种手臂康复训练装置,属于人体上肢康复训练辅助设备领域,本发明包括吊架,其位置固定;肩部结构,其吊装于所述吊架上,所述肩部结构具有肩关节和能够绕所述肩关节做旋转运动的摆臂驱动机构;肘部结构,其与所述摆臂驱动机构连接,且构造为跟随所述摆臂驱动机构运动而联动;腕部结构,其用于接收手部,所述腕部结构与所述肘部结构连接,且构造为套装于手部外部并柔性支撑腕关节,本发明实现了能够带动患者手臂进行康复运动,具有动作灵活、柔顺、安全性好,手臂康复效果好的有益效果。
技术研发人员:庞在祥,邓晓梦,孙中波,郭丹秋,王南,宫丽男,姜大伟,尹晓静,张曦予,李也
受保护的技术使用者:长春工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!