穿刺执行装置的制作方法
本发明涉及穿刺手术机器人领域,具体地说,涉及一种用于穿刺手术机器人的穿刺执行装置。
背景技术:
1、穿刺手术通过机器人系统是依据主机程序,将活检针、消融针等各种穿刺针刺入患者体内的病灶,即预先设定的位置,不仅可以实现实时的穿刺针路径引导,还能够克服人手震颤的影响,极大的提高了手术精度。
2、为此本申请的创作人曾在中国专利第2022113329628号中公开了一种进针装置,该进针装置为一体式结构,在进一步的研发过程存中,发现存在有更换穿刺针不方便,穿刺过程中仍会出现穿刺针打滑现象。
3、另,穿刺针需要进入人体内部,对于夹取穿刺针设备的消毒、安全、卫生要求极为严格,上述专利中与穿刺针接触部位的更换、穿刺针的更换需要多个步骤才能完成,不够方便。
技术实现思路
1、本发明的目的在于提供一种穿刺执行装置,直接固定安装在机械臂末端,同时设计出与其配套的一次性进针装置,不仅可以实现穿刺针的夹持、定位及执行穿刺,而且在每次穿刺手术完成后,用于夹持穿刺针的进针装置与穿刺针一起更换,可以消除因消毒不彻底而存在的安全隐患,并且更换非常方便。
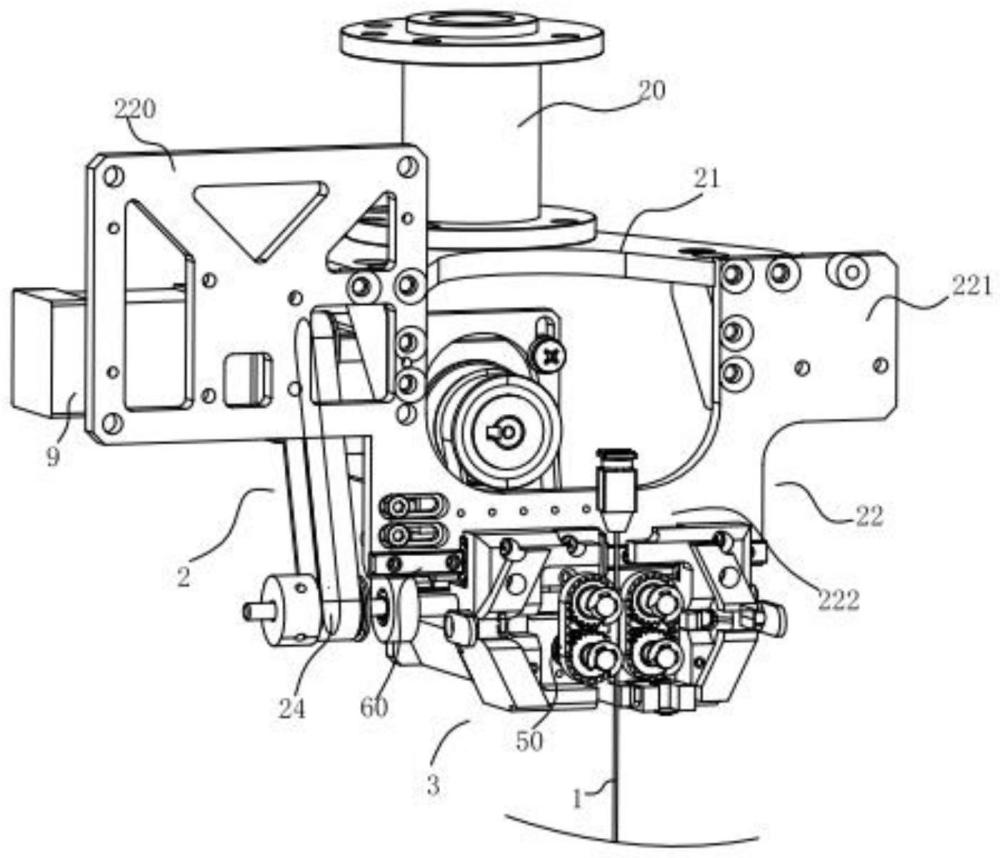
2、本发明中的穿刺执行装置固定安装在穿刺手术机器人机械臂末端,用于驱动穿刺针完成进针动作,包括有结构光3d相机、穿刺装置和进针装置;所述结构光3d相机的结构光源和相机拆分后固定安装在所述穿刺装置的同一侧;
3、所述穿刺装置包括有基座、第一驱动装置、第二驱动装置和锁挂装置;
4、所述基座用于固定安装所述结构光3d相机、第一驱动装置、第二驱动装置和锁挂装置,所述第二驱动装置与所述锁挂装置连接驱动;
5、所述锁挂装置用于快速拆卸、组装所述进针装置,并能驱动所述进针装置作开启或闭合;
6、所述第一驱动装置驱动所述进针装置中的皮带驱动装置驱动所述穿刺针作进针运动。
7、优选地,所述基座包括有相互垂直安装的主安装板和副安装板,所述主安装板在安装所述副安装板的一侧一体成形有u形凹槽;所述副安装板包括有位于两边的结构光源固定架和相机固定架,位于中间位置并连接所述结构光源固定架和相机固定架于一体的进针装置安装架,所述锁挂装置固定安装在所述进针装置安装架的最底部。
8、优选地,所述锁挂装置包括有与所述进针装置安装架固定安装的滑轨、第一定位块、第二定位块、双螺纹丝杆及锁固机构;
9、所述第一定位块、第二定位块对称、滑动地与所述滑轨联接;所述双螺纹丝杆与所述滑轨平行,并同时穿过所述第一定位块、第二定位块;所述第一定位块、第二定位块分别位于所述双螺纹丝杆表面不同方向的螺纹段处,旋转双螺纹丝杆能同步驱动所述第一定位块、第二定位块作相对或相背移动;所述第一定位块、第二定位块的中间位置分别与所述第一驱动装置枢转连接。
10、优选地,所述双螺纹丝杆为一圆柱直杆,圆柱表面分成三段,分别为与所述第二传动装置连接的驱动段,与所述第一定位块螺纹连接的第一螺纹段、与所述第二定位块螺纹连接的第二螺纹段。
11、优选地,所述第一定位块、第二定位块均为金属材料一体成形且相互对称的异形件,一体成形有供所述进针装置置入并匹配的容置空间。
12、优选地,所述锁固机构包括有一组分别对称设在所述第一定位块、第二定位块内的弹性元件、解锁手柄和锁固件。
13、优选地,所述进针装置包括有能相互闭合或分离的第一针卡和第二针卡,所述第一针卡、第二针卡均安装有一组与所述第一驱动装置联接的皮带驱动装置;
14、所述第一针卡和所述第二针卡均由一次性医用材料一体成形,均包括有穿刺针夹持部、与所述锁挂装置能拆卸连接的连接部及皮带驱动装置安装部;
15、所述第一针卡、第二针卡闭合后在所述穿刺针夹持部形成供所述穿刺针穿设的穿刺针安装孔,穿入所述穿刺针安装孔的所述穿刺针夹装在两组所述皮带驱动装置之间;
16、每一组所述皮带驱动装置包括有两个或两个以上的皮带轮,与所述皮带轮啮合连接的皮带。
17、优选地,所述第一针卡、第二针卡设置有能使所述第一针卡、第二针卡相互锁合与分开的锁合结构。
18、优选地,所述第一针卡和第二针卡分别在所述穿刺针夹持部一体成形有截面呈v形的开口凹槽,沿所述开口凹槽底部延伸有导引块,所述第一针卡和第二针卡的开口凹槽对插后形成能微调直径大小的所述穿刺针安装孔。
19、优选地,所述锁合结构包括有所述第一针卡上一体成形的椭圆形通孔,所述第二针卡上一体成形的异形通孔。
20、本发明中的穿刺执行装置将进针装置与穿刺针整体作一次性使用用具,每次手术时,只需整体更换进针装置和穿刺针即可,使手术流程更加简便与快捷,同时可以简化每次使用后都需要对穿刺装置进行消毒的程序。
21、本发明中的穿刺执行装置将结构光3d相机与穿刺装置、进针装置集合成一体,具有结构简单、体积小,适用于在ct室有限的空间内实现机器人手术。
技术特征:
1.一种穿刺执行装置,固定安装在穿刺手术机器人机械臂末端,用于驱动穿刺针完成进针动作,包括有结构光3d相机、穿刺装置和进针装置;所述结构光3d相机的结构光源和相机拆分后固定安装在所述穿刺装置的同一侧;其特征在于,
2.根据权利要求1所述的穿刺执行装置,其特征在于,所述基座包括有相互垂直安装的主安装板和副安装板,所述主安装板在安装所述副安装板的一侧一体成形有u形凹槽;所述副安装板包括有位于两边的结构光源固定架和相机固定架,位于中间位置并连接所述结构光源固定架和相机固定架于一体的进针装置安装架,所述锁挂装置固定安装在所述进针装置安装架的最底部。
3.根据权利要求2所述的穿刺执行装置,其特征在于,所述锁挂装置包括有与所述进针装置安装架固定安装的滑轨、第一定位块、第二定位块、双螺纹丝杆及锁固机构;
4.根据权利要求3所述的穿刺执行装置,其特征在于,所述双螺纹丝杆为一圆柱直杆,圆柱表面分成三段,分别为与所述第二传动装置连接的驱动段,与所述第一定位块螺纹连接的第一螺纹段、与所述第二定位块螺纹连接的第二螺纹段。
5.根据权利要求3所述的穿刺执行装置,其特征在于,所述第一定位块、第二定位块均为金属材料一体成形且相互对称的异形件,一体成形有供所述进针装置置入并匹配的容置空间。
6.根据权利要求3所述的穿刺执行装置,其特征在于,所述锁固机构包括有一组分别对称设在所述第一定位块、第二定位块内的弹性元件、解锁手柄和锁固件。
7.根据权利要求1所述的穿刺执行装置,其特征在于,所述进针装置包括有能相互闭合或分离的第一针卡和第二针卡,所述第一针卡、第二针卡均安装有一组与所述第一驱动装置联接的皮带驱动装置;
8.根据权利要求7所述的穿刺执行装置,其特征在于,所述第一针卡、第二针卡设置有能使所述第一针卡、第二针卡相互锁合与分开的锁合结构。
9.根据权利要求8所述的穿刺执行装置,其特征在于,所述第一针卡和第二针卡分别在所述穿刺针夹持部一体成形有截面呈v形的开口凹槽,沿所述开口凹槽底部延伸有导引块,所述第一针卡和第二针卡的开口凹槽对插后形成能微调直径大小的所述穿刺针安装孔。
10.根据权利要求7所述的穿刺执行装置,其特征在于,所述锁合结构包括有所述第一针卡上一体成形的椭圆形通孔,所述第二针卡上一体成形的异形通孔。
技术总结
本发明公开了一种穿刺执行装置,固定安装在穿刺手术机器人机械臂末端,用于驱动穿刺针完成进针动作,包括有结构光3D相机、穿刺装置和进针装置;所述结构光3D相机的结构光源和相机拆分后固定安装在所述穿刺装置的同一侧;所述穿刺装置包括有基座、第一驱动装置、第二驱动装置和锁挂装置;所述基座用于固定安装所述结构光3D相机、第一驱动装置、第二驱动装置和锁挂装置,所述第二驱动装置与所述锁挂装置连接驱动;所述锁挂装置用于快速拆卸、组装所述进针装置,并能驱动所述进针装置作开启或闭合;所述第一驱动装置驱动所述进针装置中的皮带驱动装置驱动所述穿刺针作进针运动。
技术研发人员:周羽,崔禹恒,甘承军,隋晨光
受保护的技术使用者:苏州派尼迩医疗科技有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!