一种多自由度手术机器人的制作方法
本发明涉及医疗器械,特别是涉及一种多自由度手术机器人。
背景技术:
1、目前市场上骨科手术设备分三部分组成:主控台车、机械手臂台车以及双目影像台车,每一个部分的台车都是大体积,重量也重,不便于运输,操作不方便,在手术过程中需要多人配合才能完成手术,操作效率比较低,而且经常会出现操作失误给患者带来伤害,虽然目前主流的骨科手术设备都配置专用的机械臂,工作范围比较大,但是机器臂的精度并不是很高,骨科手术设备配置的都是6自由度的机械手臂,机械臂的每个关节长度也比较长,每个关节都有单独的电机驱动,由于在手术中每个关节都是联动的,这样对机械臂的刚性,运动控制算法要求都特别高,而且还要通过影像来完成术前和术中的导航定位,这样就很难精准定位,且串联机械臂容易掉落。而且,现有的多自由度机器人体积重量较大,不能满足轻便的需求,且结构刚性不足,对目标通道的把持力不够。
技术实现思路
1、针对以上现有技术中的缺陷,本发明的目的是提供一种多自由度手术机器人,其体积小、精度高,稳定性强。
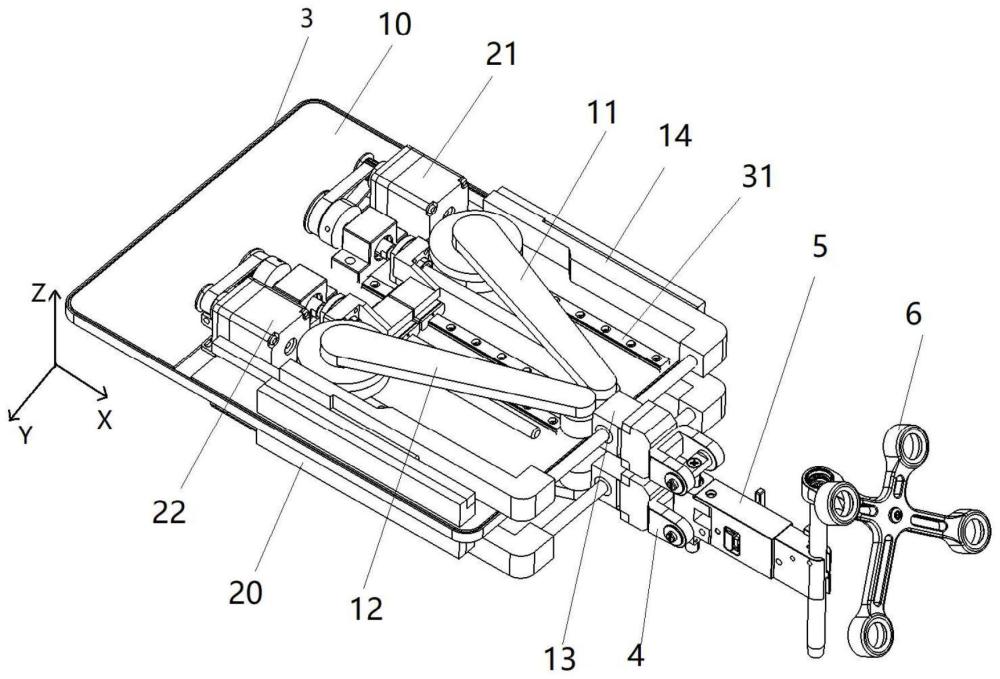
2、本发明提供的多自由度手术机器人,包括基座、驱动组件、移动组件、及关节组件,所述驱动组件、移动组件、关节组件各有两组,分别设于所述基座的两个相对的安装面,其中:
3、所述移动组件包括第一摆杆、第二摆杆、及摆杆连接件;第一摆杆的远端、第二摆杆的远端分别与摆杆连接件铰接连接;
4、所述驱动组件包括电机,所述电机包括第一电机和第二电机,所述第一电机用于驱动所述第一摆杆的近端沿第一方向运动,所述第二电机用于驱动所述第二摆杆的近端沿所述第一方向运动;
5、所述关节组件可转动连接所述移动组件。
6、在一个实施例中,所述多自由度手术机器人还包括输出端固定组件,所述输出端固定组件连接所述关节组件。
7、在一个实施例中,所述电机采用带闭环的控制电机。
8、在一个实施例中,所述电机朝向所述基座的边缘设置,所述驱动组件还包括转向装置,所述转向装置包括第一同步轮、第二同步轮及同步带,所述电机的输出轴连接所述第一同步轮,第一同步轮与第二同步轮之间通过同步带连接。
9、在一个实施例中,转向装置包括第一转向装置和第二转向装置,所述第一电机连接所述第一转向装置,所述第二电机连接所述第二转向装置。
10、在一个实施例中,所述第一电机通过第一转向装置连接沿所述第一方向设置的第一丝杆,所述第一丝杆上设有第一丝杆螺母。
11、在一个实施例中,所述第二电机通过第二转向装置连接沿所述第一方向设置的第二丝杆,所述第二丝杆上设有第二丝杆螺母。
12、在一个实施例中,所述第一丝杆通过第一丝杆固定座连接于所述基座,所述第二丝杆通过第二丝杆固定座连接于所述基座。
13、在一个实施例中,所述第一摆杆的近端与所述第一丝杆螺母铰接连接,所述第二摆杆的近端与所述第二丝杆螺母铰接连接。
14、在一个实施例中,所述第一摆杆的近端连接第一轴承,所述第二摆杆的近端连接第二轴承,所述第一轴承和所述第二轴承沿所述第一方向运动,所述第一轴承连接第一丝杆螺母,所述第二轴承连接所述第二丝杆螺母。
15、在一个实施例中,所述第一丝杆螺母滑块和所述第一轴承分别位于所述第一丝杆螺母的两侧,所述第二丝杆螺母滑块和所述第二轴承分别位于所述第二丝杆螺母的两侧。
16、在一个实施例中,所述第一轴承和/或第二轴承为交叉圆柱滚子轴承。
17、在一个实施例中,所述基座上设有沿所述第一方向设置的第一摆杆导轨和第二摆杆导轨,所述第一摆杆的近端沿所述第一摆杆导轨滑动,所述第二摆杆的近端沿所述第二摆杆导轨滑动。
18、在一个实施例中,所述基座上设有沿第一方向设置的第三摆杆导轨和第四摆杆导轨,一丝杆螺母滑块在所述第三摆杆导轨上滑动,所述第二丝杆螺母滑块在所述第四摆杆导轨上滑动。
19、在一个实施例中,所述摆杆连接件沿第二方向运动,所述第二方向垂于与第一方向。
20、在一个实施例中,所述移动组件上设有摆杆连接导轨,所述摆杆连接导轨与所述摆杆基座固定连接,所述摆杆连接件沿平行于所述摆杆连接导轨的方向运动。
21、在一个实施例中,所述移动组件还包括固定连接的摆杆连接滑块和摆杆连接座,所述摆杆连接滑块在所述摆杆连接导轨上滑动。
22、在一个实施例中,所述摆杆连接座连接所述关节组件。
23、在一个实施例中,所述基座上设有沿所述第一方向设置的移动组件导轨,所述移动组件沿所述移动组件导轨运动。
24、在一个实施例中,所述移动组件还包括摆杆基座,所述摆杆基座与所述摆杆连接导轨固定连接。
25、在一个实施例中,所述移动组件导轨的底座固定连接于所述基座,所述移动组件导轨的滑轨连接于所述摆杆基座。
26、在一个实施例中,所述移动组件导轨为交叉滚柱导轨。
27、在一个实施例中,所述移动组件导轨有两个,分别设于所述基座的两侧。
28、在一个实施例中,所述移动组件还包括移动组件壳体,所述移动组件壳体连接所述摆杆基座。
29、在一个实施例中,所述输出端固定组件包括直线导轨和输出端固定套,所述直线导轨的两端分别连接一个所述关节组件,所述输出端固定套连接所述直线导轨。
30、在一个实施例中,所述直线导轨的两端分别连接一个所述关节转轴。
31、在一个实施例中,所述输出端固定套的远端设有通孔,所述通孔的轴线与所述直线导轨的轴线平行。
32、在一个实施例中,所述通孔中设有定位空心套筒,所述定位空心套筒连接示踪器。
33、在一个实施例中,所述多自由度手术机器人还包括壳体,所述壳体与所述基座可拆卸连接,所述驱动组件、所述移动组件的至少部分位于所述壳体的内部空腔中,所述壳体上设有人机交互屏幕组件。
34、在一个实施例中,所述移动组件还包括移动组件壳体,所述移动组件壳体固定连接所述摆杆基座,所述第一摆杆、所述第二摆杆、所述摆杆连接件导轨设于所述移动组件壳体的内部,所述摆杆连接座设于所述移动组件壳体的外部。
35、在一个实施例中,所述移动组件还包括防尘带,所述移动组件壳体上设有出口,所述防尘带用于封堵所述出口。
36、在一个实施例中,所述摆杆连接座包括固定连接的摆杆连接座主体部和摆杆连接座凹陷部,所述摆杆连接滑块上设有与所述摆杆连接座凹陷部配合的摆杆连接滑块凸出部,所述防尘带的一部分位于所述摆杆连接座凹陷部与所述摆杆连接滑块凸出部之间。
37、在一个实施例中,所述多自由度手术机器人还包括导航定位系统,所述导航定位系统包括路径规划模块、导航定位模块、控制模块以及显示模块;其中,所述第一电机和第二电机均与所述控制模块通信连接,所述导航定位模块分别与所述路径规划模块、所述控制模块及所述显示模块通信连接,所述路径规划模块用于根据治疗方案规划导航路径;所述导航定位模块用于识别和追踪与需手术部位有固定位置关系的示踪器,并根据示踪器的位置定位到目标位置;所述控制模块被配置为控制所述驱动组件的运行;所述显示模块被配置为显示输出端固定套或输出端固定套与固定位置关系的位置的运行轨迹。
38、与现有技术相比,本发明具有如下的有益效果:
39、1、本发明提供的手术机器人,通过同一平面内两个平行直线模组的耦合运动来驱动两个摆杆的平移和摆动,最终实现目标点可以在一个面域内移动,使得输出端能在三维空间的工作范围内呈现任意角度及姿态,产品的精度高,稳定性好。
40、2、本发明提供的手术机器人,将传统的x/y直线模组结构里的四层的四自由度结构做到两层结构,在行程相同的前提下把机器人本体体积做到了最小和重量较轻,体积小给术者的手术操作带来极大的便利,不会遮挡太多空间,重量轻能够方便快速转移术中使用位置,在术中医生可单人操作,减少操作台和手术太交叉操作;而且该设备在手术中稳定性强,安全可靠,操作方便快捷。
41、3、在采用直线滚珠滑动导轨和交叉滚柱直线导轨连用,设备在工作运行时位置精度高,不易变形,各部件的位置精准,产品的精准度高。
42、4、功能齐全,无需额外配置电脑,尤其在设置人机交互屏幕组件时,能够通过在机器人的屏幕进行操作,操作简单方便;
43、5、在设置了导航系统时,本发明的设备术中定位、导航等各类功能齐全,触摸屏显示器使人因工程操作简单方便,使用场景广泛,如骨科、神外、普外、泌尿等多科室,对使用环境无特殊要求,普通基层医院的各类手术室同样适用。
- 还没有人留言评论。精彩留言会获得点赞!