一种轮椅上下楼辅助装置及其使用方法
本发明涉及轮椅辅助装置,尤其涉及一种轮椅上下楼辅助装置及其使用方法。
背景技术:
1、目前,市场上有关辅助轮椅的爬楼装置大多数是在普通轮椅的基础上进行设计与改装。例如轮式爬楼机器人和履带式爬楼机器人的研究设计最多,研究产品也比较成熟,但在使用过程中受到爬楼机构运动不平稳、安全性能差、制造成本高等多方面因素的制约,使得产品目前市场使用较少,此外还有步进式爬楼机器人,但此类装置其爬楼动作操作困难,爬楼时间长,在实施爬楼梯时容易造成侧倾,存在一定的危险系数。
2、目前在辅助爬楼时,不能仅仅考虑购买带有爬楼性能的轮椅,此类轮椅不仅造价相对昂贵,而且在使用过程中具有一定的局限性,只能供一人使用,无法兼顾辅助其余普通轮椅的上下楼作业过程,在无电梯的复式楼爬楼场景中,无法保证每一个轮椅都具有爬楼功能,故此时对普通轮椅十分不便。
技术实现思路
1、针对现有技术的不足,本发明提供了一种轮椅上下楼辅助装置及其使用方法,解决了普通轮椅无法兼备上下楼作业的技术问题。
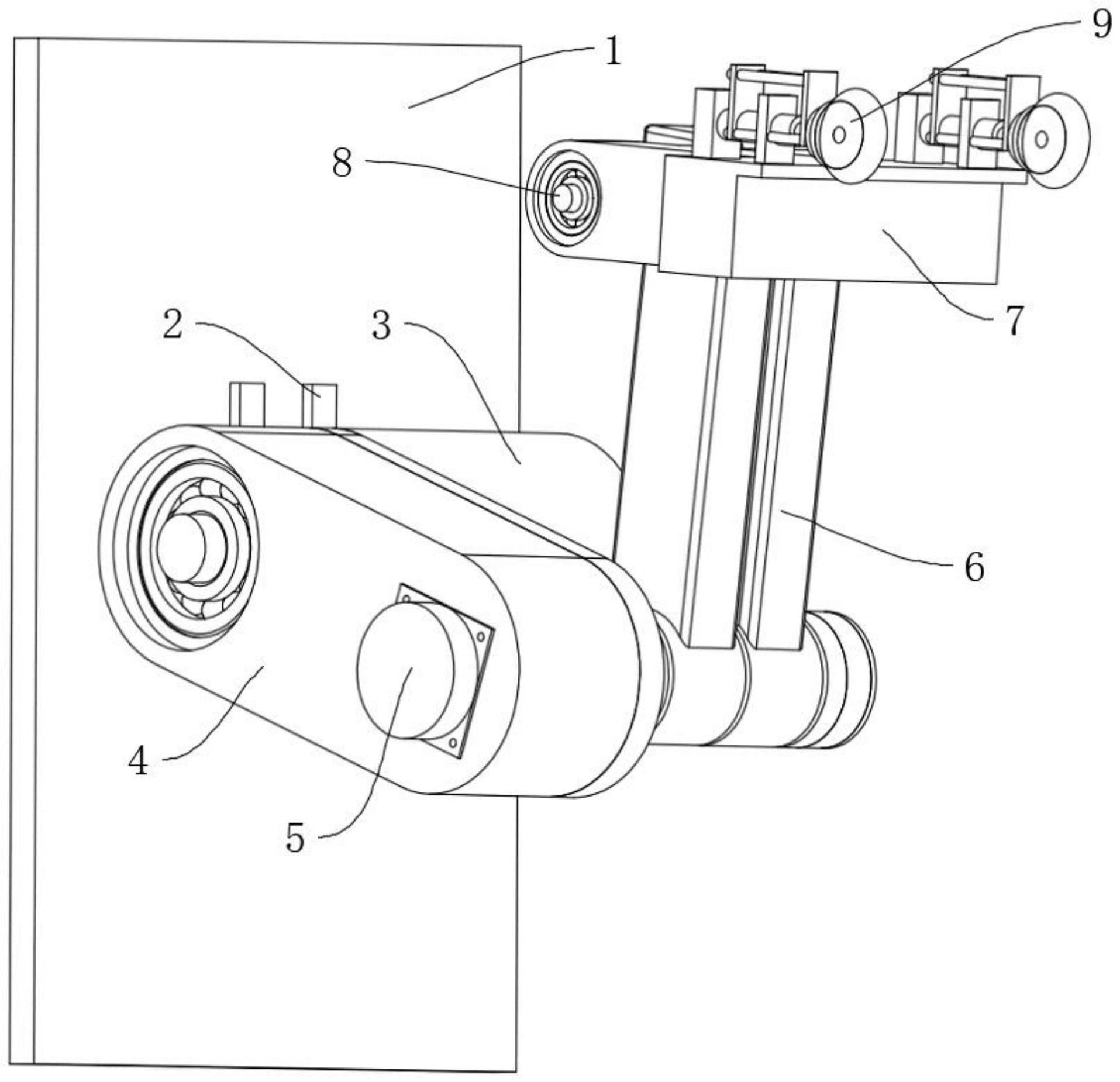
2、为解决上述技术问题,本发明提供了如下技术方案:一种轮椅上下楼辅助装置及其使用方法,包括底板,所述底板的侧壁固定连接有机架,所述机架的内侧固定连接有电机一,所述电机一的输出端固定连接有传动臂一,所述传动臂一转动末端设有电机二,所述电机二的输出端设有传动臂二,所述传动臂二的转动末端设有电机三,电机三的输出端设有传动臂三,所述传动臂三的侧壁对称设有两个吸盘。
3、优选的,所述吸盘的材质为丁腈橡胶,所述吸盘的截面形状为圆形。
4、优选的,所述吸盘的外侧设有抽气泵,所述机架靠近墙体的一侧设有导轨。
5、一种轮椅上下楼辅助装置的使用方法,其特征在于:包括如下步骤:
6、s1、起始运动:当轮椅靠近装置时,先由电机一控制传动臂一进行转动,到达指定位置后,再由电机二带动传动臂二进行转动,最后由电机三带动传动臂三进行转动,三者转动角度依据轮椅高度进行调节,当转动完毕,真空吸盘开始工作,使得其进行真空吸附,将轮椅吸附起来;
7、s2、运送运动:装置的各个执行构件需保持静止,只需使装置沿墙壁上的导轨由电机带动进行滑动,将轮椅以及老人运送上下楼即可;
8、s3、复位运动;当轮椅运送完毕,便可将轮椅放下,并按照起始运动的运动过程进行反向运动,依次收回传动臂三、传动臂二、传动臂一,进行复位,必要时可以进行循环往复运动。
9、5.根据权利要求4所述的一种轮椅上下楼辅助装置的使用方法,其特征在于:所述s1中吸盘工作中采用真空吸附,工作时紧贴并吸附于轮椅,整体参数的设计受最大载重重量、吸盘吸吊力、吸盘真空度等影响,截面形状为圆形时,所需吸盘直径:
10、
11、式中m为吸附物的重量,δ为安全系数,吸附物的起吊方向是垂直起吊。n为吸盘个数。工作时p为真空压力。由于真空吸盘在吸附时会变形,吸盘的外径将增加10%左右。吸盘安装时为垂直安装,真空压力的吸吊力f与真空压力p,吸盘与吸附物在墙面的摩擦力μ,吸盘面积s等因素相关,所需吸吊力为:
12、f=μ×p×s×0.1
13、式中μ为摩擦系数0.2;s为吸盘面积,由于是圆形,
14、优选的,所述s1-s4中各执行构件均采可进行循环往复运动,其中电机一的将传动臂一提升时工作时间记为a1b1,电机一将传动臂一运送停歇时间记为b1c1,电机一将传动臂一复位运动工作时间记为c1d1,电机二的将传动臂二提升时工作时间记为a2b2,电机二将传动臂二运送停歇时间记为b2c2,电机二将传动臂二复位运动工作时间记为c2d2,电机三的将传动臂三提升时工作时间记为a3b3,电机三将传动臂三运送停歇时间记为b3c3,电机三将传动臂三复位运动工作时间记为c3d3。
15、优选的,步骤s1中,首先将传动臂一由起始位置转动到指定位置,停歇一段时间间隔b1c1等待装置将轮椅运送完成后,再进行复位运动c1d1;
16、步骤s2中,在传动臂二转动的过程中,传动臂二进行转动,由起始位置转动到指定位置a2b2,停歇一段时间间隔b2c2等待装置将轮椅运送完成后,再进行复位运动c2d2;
17、步骤s3中,在传动臂三转动过程中,传动臂三进行转动,尤其是位置转动到指定位置a3b3,停歇一段时间间隔b3c3等待装置将轮椅运送完成后,再进行复位运动c3d3;
18、所述b3c3间隔为电机带动此装置沿墙壁导轨运动,将轮椅运送至楼下。
19、借由上述技术方案,本发明提供了一种轮椅上下楼辅助装置及其使用方法,至少具备以下有益效果:
20、1、本发明通过电机驱动控制机械臂的伸缩,利用真空吸盘、气缸对轮椅进行双重安全保护措施,从而达到可以实现对于绝大多数轮椅均可达到爬楼的目的,同时采用了气动、电控相结合,提高了轮椅的上下楼效率,保障了人在上楼过程中的安全性。
21、2、本发明通过真空气缸和吸盘将轮椅来运送轮椅,既可以保证运动过程中的安全性,也可以使老年人在上下楼过程中无需离开轮椅,还弥补了市面上一些辅助爬楼装置只针对爬楼而没有考虑到下楼的缺陷,结构简单,操作简便,体积较小且质量较轻,对楼梯无损伤,可以做到适用于绝大多数轮椅,而无需刻意去购买造价高昂的爬楼轮椅,减轻了老年人的生活负担。
22、3、本发明运动形式简单,便于安装与调试,同时易于固定和转动,底板用于连接整个装置和墙壁,使得装置可以在墙壁上进行平移,进行轮椅的循环往复运送工作。
技术特征:
1.一种轮椅上下楼辅助装置,包括底板(1),其特征在于:所述底板(1)的侧壁固定连接有机架(2),所述机架(2)的内侧固定连接有电机一(3),所述电机一(3)的输出端固定连接有传动臂一(4),所述传动臂一(4)转动末端设有电机二(5),所述电机二(5)的输出端设有传动臂二(6),所述传动臂二的转动末端设有电机三(7),电机三(7)的输出端设有传动臂三(8),所述传动臂三(8)的侧壁对称设有两个吸盘(9)。
2.根据权利要求1所述的一种轮椅上下楼辅助装置,其特征在于:所述吸盘(9)的材质为丁腈橡胶,所述吸盘(9)的截面形状为圆形。
3.根据权利要求1所述的一种轮椅上下楼辅助装置,其特征在于:所述吸盘(9)的外侧设有抽气泵,所述机架(2)靠近墙体的一侧设有导轨。
4.根据权利要求1-3任一项所述的一种轮椅上下楼辅助装置的使用方法,其特征在于:包括如下步骤:
5.根据权利要求4所述的一种轮椅上下楼辅助装置的使用方法,其特征在于:所述s1中吸盘工作中采用真空吸附,工作时紧贴并吸附于轮椅,整体参数的设计受最大载重重量、吸盘吸吊力、吸盘真空度等影响,截面形状为圆形时,所需吸盘直径:
6.根据权利要求4所述的一种轮椅上下楼辅助装置的使用方法,其特征在于:所述s1-s3中各执行构件均采可进行循环往复运动,其中步骤s1中,电机一的将传动臂一提升时工作时间记为a1b1,电机一将传动臂一运送停歇时间记为b1c1,电机一将传动臂一复位运动工作时间记为c1d1,其中步骤s2中,电机二的将传动臂二提升时工作时间记为a2b2,电机二将传动臂二运送停歇时间记为b2c2,电机二将传动臂二复位运动工作时间记为c2d2,其中步骤s3中,电机三的将传动臂三提升时工作时间记为a3b3,电机三将传动臂三运送停歇时间记为b3c3,电机三将传动臂三复位运动工作时间记为c3d3。
7.根据权利要求6所述的使用方法,其特征在于:步骤s1中,首先将传动臂一由起始位置转动到指定位置,停歇一段时间间隔b1c1等待装置将轮椅运送完成后,再进行复位运动c1d1。
8.根据权利要求6所述的一种轮椅上下楼辅助装置的使用方法,其特征在于:步骤s2中,在传动臂二转动的过程中,传动臂二进行转动,由起始位置转动到指定位置a2b2,停歇一段时间间隔b2c2等待装置将轮椅运送完成后,再进行复位运动c2d2。
9.根据权利要求6所述的一种轮椅上下楼辅助装置的使用方法,其特征在于:步骤s3中,在传动臂三转动过程中,传动臂三进行转动,尤其是位置转动到指定位置a3b3,停歇一段时间间隔b3c3等待装置将轮椅运送完成后,再进行复位运动c3d3。
10.根据权利要求6所述的一种轮椅上下楼辅助装置的使用方法,其特征在于:所述b3c3间隔为电机带动此装置沿墙壁导轨运动,将轮椅运送至楼下。
技术总结
本发明涉及轮椅辅助装置技术领域,尤其涉及一种轮椅上下楼辅助装置及其使用方法,包括底板,所述底板的侧壁固定连接有机架,所述机架的内侧固定连接有电机一,所述电机一的输出端固定连接有传动臂一,所述传动臂一转动末端设有电机二,所述电机二的输出端设有传动臂二,所述传动臂二的转动末端设有电机三,电机三的输出端设有传动臂三,所述传动臂三的侧壁对称设有两个吸盘。本发明通过电机驱动控制机械臂的伸缩,利用真空吸盘、气缸对轮椅进行双重安全保护措施,从而达到可以实现对于绝大多数轮椅均可达到爬楼的目的,同时采用了气动、电控相结合,提高了轮椅的上下楼效率,保障了人在上楼过程中的安全性。
技术研发人员:甄圣超,赵辰远
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!