手术机器人主从控制方法和系统与流程
本技术涉及智能医疗,特别是涉及一种手术机器人主从控制方法和系统。
背景技术:
1、微创手术机器人、内窥镜手术机器人等在手术过程中,操作者通过操作台的主手控制装置以遥操作方式操控机器人的从手(机械臂及手术器械)来完成相应的操作。具体表现为主手端产生运动控制信号,通过网络通信传输至从手端,从手端根据接收的指令动作且同时反馈当前状态,操作者根据反馈信息进行决策控制。由于主手端的操作空间和机器人从手工作空间不一致,因此需要设计合理的主从映射方法实现主从映射匹配,常见的主从映射方法包括绝对式映射、增量式映射、常比例映射和变比例映射等。
2、然而,目前的对于主手端的位姿的测量是通过主手关节编码器和连杆的测量系统进行的,主从映射是通过获取主手各个关节的角度值变化量,通过一定的计算进而得到相应的位姿和速度,然后映射到从手末端相应的速度和位姿,这样系统误差较大。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高准确性的手术机器人主从控制方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供一种手术机器人主从控制方法,所述方法包括:
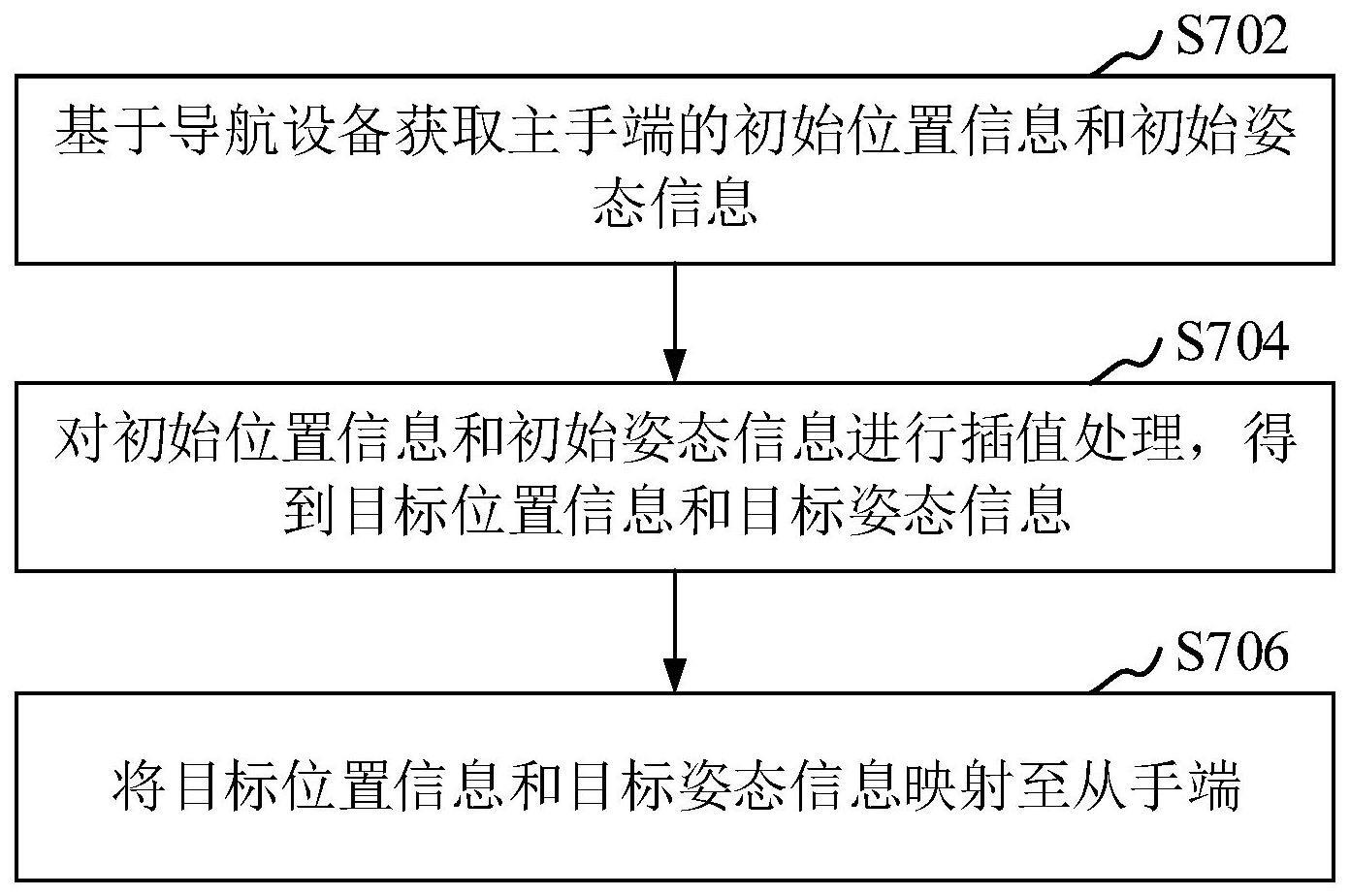
3、基于导航设备获取主手端的初始位置信息和初始姿态信息;
4、对所述初始位置信息和所述初始姿态信息进行插值处理,得到目标位置信息和目标姿态信息;
5、将所述目标位置信息和所述目标姿态信息映射至从手端。
6、在其中一个实施例中,所述基于导航设备获取主手端的初始位置信息和初始姿态信息,包括以下至少一种:
7、基于光学导航的导航设备获取主手端的初始位置信息和初始姿态信息;
8、基于电磁导航的导航设备获取主手端的初始位置信息和初始姿态信息。
9、在其中一个实施例中,所述基于导航设备获取主手端的初始位置信息和初始姿态信息,包括:
10、通过导航设备获取主手端当前时刻的初始位置和初始姿态;
11、根据所述主手端当前时刻的初始位置和上一时刻的初始位置得到初始位置增量;
12、根据所述主手端当前时刻的初始姿态和上一时刻的初始姿态得到初始姿态增量;
13、根据所述初始位置增量得到速度信息和加速度信息,根据所述初始姿态增量得到角速度信息和角加速度信息;
14、将所述当前时刻的初始位置、所述速度信息和加速度信息作为所述当前时刻的初始位置信息,将所述当前时刻的初始姿态、所述角速度信息和角加速度信息作为所述当前时刻的初始姿态信息。
15、在其中一个实施例中,所述对所述初始位置信息和所述初始姿态信息进行插值处理,得到目标位置信息和目标姿态信息,包括:
16、基于上一时刻的初始位置信息和所述当前时刻的初始位置信息,对位置信息进行插值,得到目标位置信息;
17、基于上一时刻的初始姿态信息和所述当前时刻的初始姿态信息,对姿态信息进行插值,得到目标姿态信息。
18、在其中一个实施例中,所述将所述目标位置信息和所述目标姿态信息映射至从手端,包括:
19、将上一采样周期的初始位置和当前采样周期的初始位置进行差分得到目标位置增量,所述上一时刻至所述当前时刻的时间段包括多个采样周期;
20、根据上一采样周期的初始姿态和当前采样周期的初始姿态确定目标姿态增量;
21、获取位置比例系数,根据所述目标位置增量和所述位置比例系数,将所述目标位置信息映射至从手端;
22、根据所述目标姿态增量,将所述目标姿态信息映射至所述从手端。
23、在其中一个实施例中,所述将所述目标位置信息和所述目标姿态信息映射至从手端,包括:
24、获取主手位姿测量坐标系下的主手端的上一采样周期的初始位置和上一采样周期的初始姿态,并在所述主手端的上一采样周期的初始位置处,生成与所述主手位姿测量坐标系对应的主手参考坐标系;
25、获取从手位姿测量坐标系下的从手端的上一采样周期的初始位置和上一采样周期的初始姿态,并在所述从手端的上一采样周期的初始位置处,生成与所述从手位姿测量坐标系对应的从手参考坐标系;
26、获取当前采样周期中,所述主手参考坐标系相对于所述主手位姿测量坐标系的映射关系;
27、基于所述映射关系,确定所述当前采样周期中,所述从手参考坐标系相对于所述从手位姿测量坐标系转换后的目标坐标系;
28、基于所述目标坐标系,将所述目标位置信息和所述目标姿态信息映射至从手端。
29、在其中一个实施例中,所述将所述目标位置信息和所述目标姿态信息映射至从手端之前,还包括:
30、基于惯性测量设备获取主手端的参考位置信息和参考姿态信息;
31、将所述初始位置信息与参考位置信息比较,将所述初始姿态信息和所述参考姿态信息比较;
32、当所述初始位置信息与参考位置信息的差异满足位置差异要求,以及所述初始姿态信息和所述参考姿态信息的差异满足姿态差异要求时,继续执行将所述目标位置信息和所述目标姿态信息映射至从手端的步骤。
33、在其中一个实施例中,所述基于导航设备获取主手端的初始位置信息和初始姿态信息之前,包括:
34、将所述主手端和所述从手端进行主从匹配;
35、当所述主手端和所述从手端匹配时,继续执行基于导航设备获取主手端的初始位置信息和初始姿态信息的步骤。
36、第二方面,本技术还提供一种手术机器人主从控制系统,所述系统包括:
37、主手端,包括操作手柄,以及多个设置于所述操作手柄的定位标记;
38、导航设备,用于基于所述定位标记获取所述主手端的初始位置信息和初始姿态信息;
39、控制器,与所述导航设备通信,用于执行上述的任意一个实施例中的手术机器人主从控制方法进行主从映射;
40、从手端,与所述控制器通信,用于基于主从映射的结果进行姿态调整。
41、在其中一个实施例中,所述导航设备包括以下至少一种:基于光学导航的导航设备和基于电磁导航的导航设备。
42、在其中一个实施例中,所述操作手柄还包括用于控制所述从手端器械夹持或开合的开关,和/或所述操作手柄还包括器械控制开关和霍尔传感器,所述霍尔传感器用于检测所述开关的开合程度,并映射至所述从手端的器械。
43、在其中一个实施例中,所述操作手柄还包括启动控制开关,用于控制是否进入主从控制模式。
44、第三方面,本技术还提供一种手术机器人主从控制装置,所述装置包括:
45、导航模块,用于基于导航设备获取主手端的初始位置信息和初始姿态信息;
46、插值模块,用于对所述初始位置信息和所述初始姿态信息进行插值处理,得到目标位置信息和目标姿态信息;
47、映射模块,用于将所述目标位置信息和所述目标姿态信息映射至从手端。
48、第四方面,本技术还提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的任意一个实施例中的方法的步骤。
49、第五方面,本技术还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的任意一个实施例中的方法的步骤。
50、第六方面,本技术还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的任意一个实施例中的方法的步骤。
51、上述手术机器人主从控制方法、装置、计算机设备、存储介质和计算机程序产品,基于导航设备获取主手端的初始位置信息和初始姿态信息,这样极大地减轻了主手重量,且无线手柄使用场景更加灵活便利,且通过导航设备代替主手关节编码器和连杆的测量系统以测量操作主手手柄的位姿,减少了系统误差,简化了系统结构,此外对所述初始位置信息和所述初始姿态信息进行插值处理,得到目标位置信息和目标姿态信息;将所述目标位置信息和所述目标姿态信息映射至从手端,可以保证导航设备和手术机器人的数据同频,从而保证位姿映射的准确性。
- 还没有人留言评论。精彩留言会获得点赞!