基于超声波的三维掌纹图像成像方法与装置
本技术涉及掌纹成像,特别是涉及一种基于超声波的三维掌纹图像成像方法、装置、计算机设备、以及存储介质。
背景技术:
1、掌纹是人类手掌皮肤上的一种天然纹路,其形态和分布具有个体差异性,因此被广泛应用于个体识别、鉴别和身份认证等领域。掌纹成像是指利用数字图像处理技术和计算机视觉技术,对手掌纹路进行三维重建和特征提取,用于身份验证和鉴别等目的。本文将综述掌纹成像技术的发展和应用现状。
2、掌纹成像技术的发展经历了多个阶段。最初的掌纹识别技术主要基于手工提取掌纹特征,然而这种方法需要大量的人力和时间,且准确率较低。后来,随着数字图像处理技术的发展,掌纹成像技术逐渐实现了自动化和高效化,包括二维掌纹成像和三维掌纹成像等。其中,三维掌纹成像技术可以更准确地获取手掌的形态信息,有效避免了二维掌纹成像中的伪造和欺骗问题。
3、虽然三维掌纹成像具备上述技术层面的优势,但是目前的三维掌纹成像方案的成像精度都较低,无法实现高精度的三维掌纹成像。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种高精度掌纹成像的基于超声波的三维掌纹图像成像方法、装置、计算机设备、以及存储介质。
2、第一方面,本技术提供了一种基于超声波的三维掌纹图像成像方法,所述方法包括:
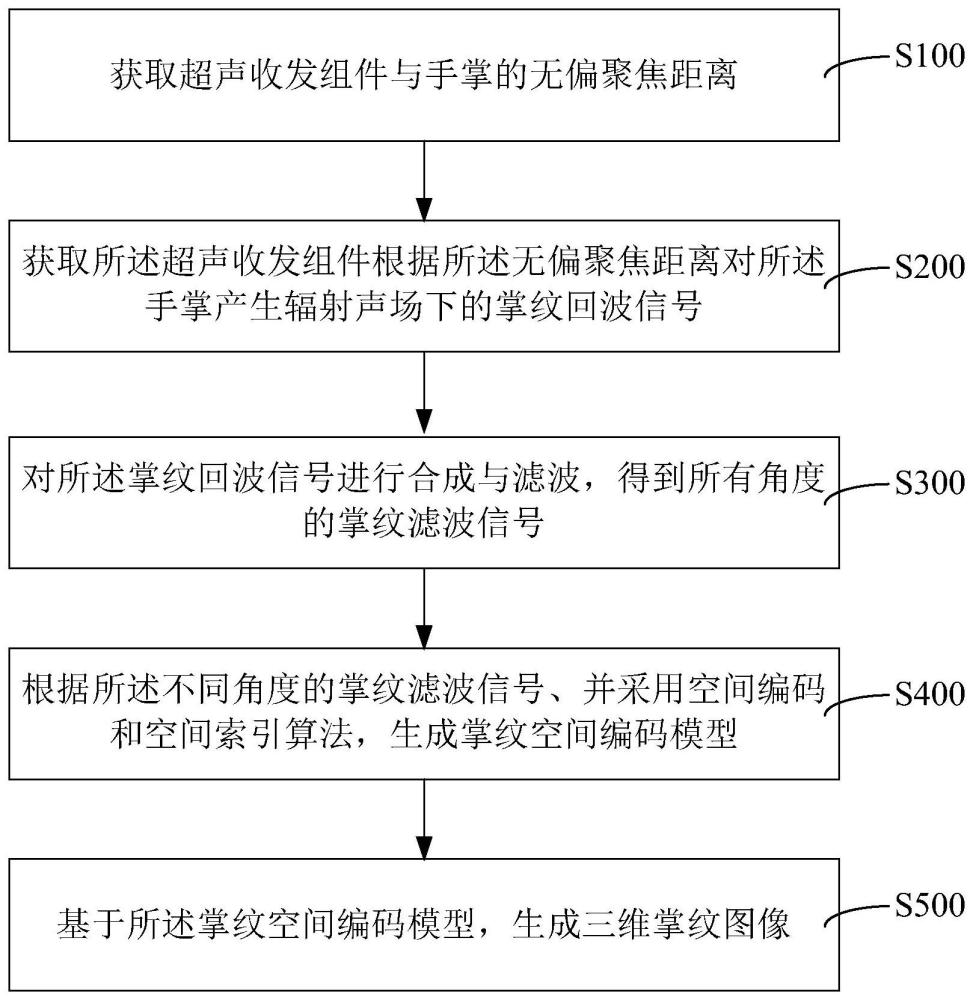
3、获取超声收发组件与手掌的无偏聚焦距离;
4、获取所述超声收发组件根据所述无偏聚焦距离对所述手掌产生辐射声场下的掌纹回波信号;
5、对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号;
6、根据所述不同角度的掌纹滤波信号、并采用空间编码和空间索引算法,生成掌纹空间编码模型;
7、基于所述掌纹空间编码模型,生成三维掌纹图像。
8、在其中一个实施例中,所述获取超声收发组件与手掌的无偏聚焦距离包括:
9、获取超声收发组件对手掌的超声发射信号、以及超声回波信号;
10、根据所述超声发射信号和所述超声回波信号,获取超声收发组件与手掌的无偏聚焦距离。
11、在其中一个实施例中,所述获取超声收发组件与手掌的无偏聚焦距离包括:
12、获取超声收发组件中发射阵元和接收阵元的参数;
13、采集所述超声收发组件中阵元无偏转角度时,向手掌发射的超声信号;
14、根据所述超声信号以及所述发射阵元和接收阵元的参数,获取所述超声组件中阵元到所述手掌的平均距离;
15、根据所述超声收发组件中阵元的数量以及所述平均距离,得到超声收发组件与手掌的无偏聚焦距离。
16、在其中一个实施例中,所述获取所述超声收发组件根据所述无偏聚焦距离对所述手掌产生辐射声场下的掌纹回波信号包括:
17、根据所述无偏聚焦距离,采用改进的掌纹回波信号采样方法和幅度变迹算法控制所述超声收发组件对所述手掌产生辐射声场、并采集掌纹回波信号。
18、在其中一个实施例中,所述根据所述无偏聚焦距离,采用改进的掌纹回波信号采样方法和幅度变迹算法控制所述超声收发组件对所述手掌产生辐射声场、并采集掌纹回波信号包括:
19、根据所述无偏聚焦距离,获取所述超声收发组件的最佳聚焦距离;
20、基于所述最佳聚焦距离,获取所述超声收发组件处于最佳辐射声场状态的声场分布计算函数;
21、利用幅度变迹算法,对所述声场分布计算函数进行优化,得到优化后的声场分布计算函数;
22、根据所述优化后的声场分布计算函数控制所述超声收发组件发射超声信号,以对所述手掌产生辐射声场;
23、采集所述超声收发组件接收的掌纹回波信号。
24、在其中一个实施例中,所述对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号包括:
25、通过波束合成算法和改进的超声滤波算法,对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号。
26、在其中一个实施例中,所述通过波束合成算法和改进的超声滤波算法,对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号包括:
27、针对不同角度分别通过数字波束合成算法,将所述掌纹回波信号使用数字方式加权求和,得到不同角度下的掌纹超声信号;
28、通过改进的超声滤波算法,滤除所述不同角度下的掌纹超声信号中手掌内部组织的无用超声回波信号、且保留手掌表面纹路的超声回波信号,得到所有角度的掌纹滤波信号。
29、在其中一个实施例中,所述根据所述不同角度的掌纹滤波信号、并采用空间编码和空间索引算法,生成掌纹空间编码模型包括:
30、根据所述不同角度的掌纹滤波信号,依次通过规则网络编码算法以及距离加权插值算法进行掌纹空间编码操作,得到掌纹空间编码模型。
31、在其中一个实施例中,所述基于所述掌纹空间编码模型,生成三维掌纹图像包括:
32、对所述掌纹空间编码模型进行点云坐标转换,得到掌纹的三维点云模型;
33、根据所述掌纹的三维点云模型,生成三维掌纹图像。
34、第二方面,本技术还提供一种基于超声波的三维掌纹图像成像装置,所述装置包括:
35、无偏聚焦距离获取模块,用于获取超声收发组件与手掌的无偏聚焦距离;
36、掌纹回波信号采集模块,用于获取所述超声收发组件根据所述无偏聚焦距离对所述手掌产生辐射声场下的掌纹回波信号;
37、合成与滤波模块,用于对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号;
38、空间编码模块,用于根据所述不同角度的掌纹滤波信号、并采用空间编码和空间索引算法,生成掌纹空间编码模型;
39、成像模块,用于基于所述掌纹空间编码模型,生成三维掌纹图像。
40、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
41、获取超声收发组件与手掌的无偏聚焦距离;
42、获取所述超声收发组件根据所述无偏聚焦距离对所述手掌产生辐射声场下的掌纹回波信号;
43、对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号;
44、根据所述不同角度的掌纹滤波信号、并采用空间编码和空间索引算法,生成掌纹空间编码模型;
45、基于所述掌纹空间编码模型,生成三维掌纹图像。
46、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
47、获取超声收发组件与手掌的无偏聚焦距离;
48、获取所述超声收发组件根据所述无偏聚焦距离对所述手掌产生辐射声场下的掌纹回波信号;
49、对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号;
50、根据所述不同角度的掌纹滤波信号、并采用空间编码和空间索引算法,生成掌纹空间编码模型;
51、基于所述掌纹空间编码模型,生成三维掌纹图像。
52、上述基于超声波的三维掌纹图像成像方法、装置、计算机设备、以及存储介质,获取超声收发组件与手掌的无偏聚焦距离;获取所述超声收发组件根据所述无偏聚焦距离对所述手掌产生辐射声场下的掌纹回波信号;对所述掌纹回波信号进行合成与滤波,得到所有角度的掌纹滤波信号;根据所述不同角度的掌纹滤波信号、并采用空间编码和空间索引算法,生成掌纹空间编码模型;基于所述掌纹空间编码模型,生成三维掌纹图像。整个过程中,基于无偏聚焦距离获取准确的掌纹回波信号,再通过合成与滤波得到所有角度的掌纹滤波信号,借助空间编码和空间索引算法添加空间信息,能够实现高精度的三维掌纹成像。
- 还没有人留言评论。精彩留言会获得点赞!