一种基于机械手臂运动的精准定位识别获取乳腺相关信息的方法及机械手臂与流程
本发明涉及医学类计算机跨学科,具体涉及一种基于机械手臂运动的精准定位识别获取乳腺相关信息的方法及机械手臂。
背景技术:
1、乳腺癌作为全球最常见的癌症之一,对于女性健康产生了严重的影响。根据世界卫生组织下属的国际癌症研究机构(iarc)的数据,2020年全球新发乳腺癌病例约为226万例,死亡人数则达到了大约68.5万。据目前的趋势,乳腺癌的发病率和死亡率预计将继续上升。据世界健康组织预测显示,2040年新诊断的乳腺癌病例将增加超过40%,预计的死亡病例则将增加超过50%。
2、乳腺癌的早期诊断和个体化治疗对于提高生存率具有重要意义。以往乳腺癌的诊断主要依靠超声技术、x线技术、mri技术等影像学检查方式。虽然这些技术在近些年均有较大的发展,但仅限于提供诊断信息,无法代替人力诊断,无法缓解医疗资源的紧张,也使得诊断准确性过分受限于医生主观经验。
3、近年来,计算机辅助检测(cade)和诊断(cadx)作为医学领域的重要创新逐渐得到认可。尤其是深度学习提出以来,任务的训练直接从领域专家中提取信息直接转变为从训练样本中提取信息,使我们能够以最佳方式利用不断增加的数据量并减少人为偏见。2021年,yiqiu shen等人在nature communication上发表的深度学习ai模型在超声图像中识别乳腺癌方面达到了放射科医生水平的准确性,显示出人工智能在乳腺癌治疗诊断中的革命性的潜力。但仅依靠单模态的数据来源进行模型升级难以具有断崖式的诊断效力的提升。因此,开发一种方法和装置以获取更为准确的乳腺参数,通过机械智能化自动化拓宽模态信息的采集,具有重要的研究意义与转化价值。具身智能体的出现为此目标的达成提供了解决方案。具身智能体获取乳腺参数的第一步就是通过机械运动运动以定位和识别乳腺,而市面上的现有技术大多只能实现机械重复性操作,难以针对不同个体的乳房做出特异性的运动以达到精准定位和识别乳腺的效果。
技术实现思路
1、为了解决现有技术存在的技术缺陷,本发明提供一种基于机械手臂运动的精准定位识别获取乳腺相关信息的方法及机械手臂。
2、本发明采用的技术解决方案是:一种基于机械手臂运动的精准定位识别获取乳腺相关信息的方法,包括以下步骤:
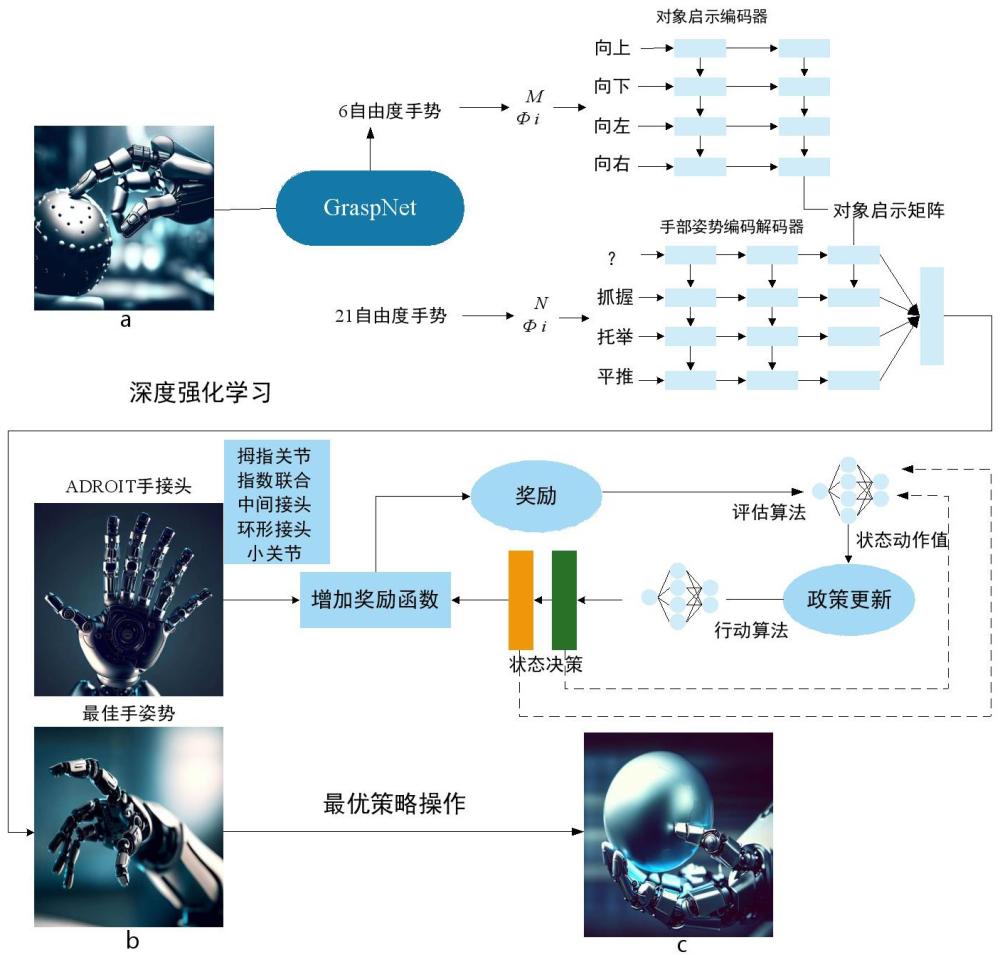
3、(1)信息转换与提取:从乳腺的低维信息中计算机械手臂动作的高维手势信息;
4、(2)奖励机制的塑造:构建针对机械手臂装置灵巧度和准确度的奖励机制,通过奖励函数将使用高维手势信息来引导机械手臂装置的动作,能够根据机械手臂的操作灵巧度和准确度进行评价和指导;
5、(3)强化学习应用:训练机械手臂装置进行灵巧操作,通过强化学习使得机械手臂装置实现对乳腺的灵巧操作;
6、(4)数据采集;通过机械手臂的手指附着的传感器精准定位识别获取乳腺相关信息的方法。
7、所述的步骤(1)信息转换与提取包括以下步骤:
8、(a)设计一个transformer模型,包含多头自注意力结构,transformer模型方程为
9、
10、其中、和分别是查询、键和值矩阵。是键的维度;
11、(b)输入低维乳腺信息如形状、位置的3d点云信息到transformer模型;
12、(c)输出transformer的最后一层提供21-dof关节位置,代表最佳的抓握手势高维手势信息,并将此信息存储以供后续步骤使用。
13、所述的步骤(2)奖励机制的塑造包括以下步骤:
14、(d)用获得的高维手势信息作为基础,构建奖励函数,所述的奖励函数为
15、
16、其中,和是权重因子,“distance_reward”为 函数根据机械手臂装置的关节与所需姿势的接近程度提供奖励,“alignment_reward”为奖励机械手臂装置与估计的手势的对齐;
17、(e)评估机械手臂装置的动作,并根据高维手势信息对其进行评分;
18、(f)调整并验证奖励函数的超参数,确保奖励机制能够有效引导机械手臂的行为。
19、所述的步骤(e)评估机械手臂装置的动作,并根据高维手势信息对其进行评分包括,
20、动态系统建模:机械臂和机械手可以描述为一个非线性动态系统,其形式为:
21、
22、其中是系统的状态,是控制输入,是时间,是非线性函数;
23、优化控制:为了达到所需的动作,我们采用模型预测控制 (mpc) 策略。其基本思想是在每个时间步解决一个优化问题:
24、
25、其中是成本函数,是每个时间步的即时成本,是预测时间窗口;
26、所述的步骤(f)调整并验证奖励函数的超参数,确保奖励机制能够有效引导机械手臂的行为包括,
27、在线学习:在执行策略后,系统采集数据并用于在线优化。优化目标是:
28、
29、其中是损失函数,是策略参数,是由参数定义的策略,是奖励;
30、仿真误差:仿真环境中的误差是由以下公式计算的:
31、
32、其中是仿真中的真实输出,是仿真中的预测输出;
33、操作误差:实际操作中的误差由以下公式计算:
34、
35、其中是实际操作中的真实输出,是实际操作中的预测输出。
36、所述的步骤(3)强化学习应用包括以下步骤:
37、(g)设计并实施深度强化学习模型,其策略函数为:
38、
39、其中是由参数化的策略函数,而是状态的特征表示;状态表示:在时间的状态包括机械手臂装置的当前姿势和物体的相对位置;动作空间:动作指导机械手臂装置的动作。这些是连续的值,表示为达到所需手势的关角;
40、(h)使用步骤(2)中的奖励机制指导深度强化学习模型的训练;
41、(i)实施策略如q学习、策略梯度方法、执行——评估算法等;
42、(j)迭代和优化模型,确保机械手臂的精准和灵巧操作。
43、所述的步骤(j)迭代和优化模型,确保机械手臂的精准和灵巧操作中策略更新规则:使用深度q学习的策略更新,其更新规则为:
44、
45、其中是学习率,是折扣因子,是下一个状态,是在状态下选择的最佳动作。
46、所述的步骤(4)数据采集与分析包括以下步骤:
47、(k)使用传感器,根据步骤(3)中机械手臂的操作收集乳腺组织触感反馈;
48、(l)转换触感数据为分析所需格式;
49、(m)分析数据;
50、(n)根据分析结果反馈到步骤(1),优化信息提取的准确性。
51、所述的步骤(k)中触感反馈为传感器捕捉压应力和滑动摩擦力的触感反馈。
52、一种获得乳腺参数的机械手臂,所述的机械手臂和机械手臂控制及数据采集模块,所述的机械手臂上设有可以进行触觉反馈捕捉的传感器,所述的机械手臂控制及数据采集模块包括以下子模块:
53、信息转换与提取子模块:从乳腺的低维信息中计算机械手臂动作的高维手势信息;
54、奖励机制的塑造子模块:构建针对机械手臂装置灵巧度和准确度的奖励机制,通过奖励函数将使用高维手势信息来引导机械手臂装置的动作,能够根据机械手臂的操作灵巧度和准确度进行评价和指导;
55、强化学习应用子模块:训练机械手臂装置进行灵巧操作,通过强化学习使得机械手臂装置实现对乳腺的灵巧操作;
56、数据采集子模块:通过机械手臂的手指附着的传感器精准定位识别获取乳腺相关信息的方法。
57、本发明的有益效果是:本发明提供了一种基于机械手臂运动的精准定位识别获取乳腺相关信息的方法及机械手臂,实现机械手臂装置对乳腺的灵巧检测。该发明的目的是提供一种更为精确和敏感的手段来识别和定位乳腺信息,从而有助于提前诊断和治疗,该方法通过transformer网络从乳腺的低维信息估计高维手势信息,为机械手臂装置提供更高维度的手势识别能力,设计的奖励塑造函数能够根据机械手臂装置的灵巧度和准确度评价其操作,使其在处理乳腺肿瘤时更加精准。采用深度强化学习算法,结合奖励函数,训练机械手臂装置进行高精度的乳腺操作,此创新点结合先进的深度强化学习算法和策略,提供对乳腺肿瘤的早期诊断信息的获取,并且本发明通过算法反馈,不断改进机械手臂的运动手势,针对不同个体乳房进行特异性定位识别,实现对不同个体的特异性定位,这是现有的机械手臂所不能实现的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!