超声刀控制频率确定方法、装置、介质及电子终端与流程
本技术涉及智能医疗器械应用,具体涉及一种超声刀控制频率确定方法、装置、介质及电子终端。
背景技术:
1、超声刀是一种常见的外科手术刀,具有创伤小、烟雾少、可凝血等特点,在外科手术中广泛应用。其工作原理是超声刀主机产生一定频率能量输出,通过换能器谐振转换为同等频率的机械纵波,带动超声刀头振动,其频率高、振幅小,对小面积人体组织产生切割凝血作用。
2、手术切割过程中,随着组织切割状态和刀尖温度的变化,组织和刀头组合的谐振频率点(也即是控制频率)实时变化,发生器同步实时做出频率调整,即跟踪锁频,实现手术过程的切割响应。但由于部分组织阻抗较大或手术操作过程组织夹持过多、手术操作过程存在与组织的剪切力等,都会产生大负载。大负载工况下,超声刀可能存在超出换能器可等效模型边界,从而产生切割报警等现象,降低了手术效率。
技术实现思路
1、鉴于以上所述相关技术的缺点,本技术提供一种超声刀控制频率确定方法、装置、介质及电子终端,以解决上述技术问题。
2、本技术提供的一种超声刀控制频率确定方法,包括:
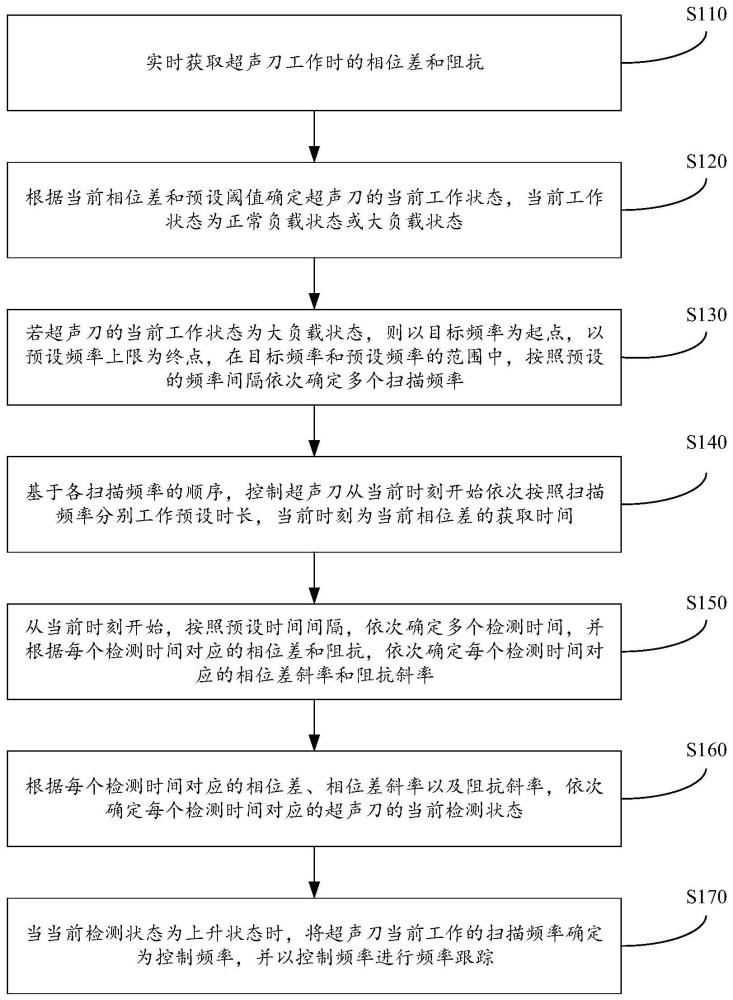
3、实时获取超声刀工作时的相位差和阻抗;
4、根据当前相位差和预设阈值确定超声刀的当前工作状态,所述当前工作状态为正常负载状态或大负载状态;
5、若超声刀的当前工作状态为大负载状态,则以目标频率为起点,以预设频率上限为终点,在目标频率和预设频率的范围中,按照预设的频率间隔依次确定多个扫描频率;
6、基于各所述扫描频率的顺序,控制超声刀从当前时刻开始依次按照所述扫描频率分别工作预设时长,所述当前时刻为所述当前相位差的获取时间;
7、从当前时刻开始,按照预设时间间隔,依次确定多个检测时间,并根据每个检测时间对应的相位差和阻抗,依次确定每个检测时间对应的相位差斜率和阻抗斜率;
8、根据每个检测时间对应的相位差、相位差斜率以及阻抗斜率,依次确定每个检测时间对应的超声刀的当前检测状态;
9、当所述当前检测状态为上升状态时,将超声刀当前工作的扫描频率确定为控制频率,并以所述控制频率进行频率跟踪。
10、于本技术一实施例中,根据每个检测时间对应的相位差、相位差斜率以及阻抗斜率,依次确定每个检测时间对应的超声刀的当前检测状态,包括:
11、根据每个检测时间对应的相位差和相位差斜率,依次确定每个检测时间对应的相位差状态;
12、根据每个检测时间对应的相位差和阻抗斜率,依次确定每个检测时间对应的阻抗状态;
13、基于每个检测时间对应的相位差状态和阻抗状态,依次确定每个检测时间对应的超声刀的当前检测状态。
14、于本技术一实施例中,根据每个检测时间对应的相位差和相位差斜率,依次确定每个检测时间对应的相位差状态,包括
15、若所述相位差<0且所述相位差斜率>0,则相位差上升参数的累计值加1,每个检测时间均对应一个相位差上升参数;
16、若所述相位差>0且所述相位差斜率<0,所述相位差>0且所述相位差斜率>0,或所述相位差<0且所述相位差斜率<0,则相位差上升参数的累计值减1;
17、若当前检测时间对应的所述相位差上升参数大于或等于第一预设数值,则确定当前检测时间对应的相位差状态为相位差上升状态。
18、于本技术一实施例中,根据每个检测时间对应的相位差和阻抗斜率,依次确定每个检测时间对应的阻抗状态,包括:
19、若所述相位差<0且所述阻抗斜率>0,则阻抗上升参数的累计值加1,每个检测时间均对应一个阻抗上升参数;
20、若所述相位差>0且所述阻抗斜率<0,所述相位差>0且所述阻抗斜率>0,或所述相位差<0且所述阻抗斜率<0,则阻抗上升参数的累计值减1;
21、当检测时间对应的所述阻抗上升参数大于或等于第二预设值时,确定检测时间对应的阻抗为递增状态;
22、若所述相位差<0且所述阻抗斜率<0,则阻抗下降参数的累计值加1,每个检测时间均对应一个阻抗下降参数;
23、若所述相位差>0且所述阻抗斜率<0、所述相位差>0且所述阻抗斜率>0或所述相位差<0且所述阻抗斜率>0,则阻抗下降参数的累计值减1;
24、当检测时间对应的所述阻抗下降参数大于或等于所述第二预设值时,确定检测时间对应的阻抗为递减状态;
25、当检测时间对应的所述阻抗上升参数小于所述第二预设值和所述阻抗下降参数小于所述第二预设值时,确定检测时间对应的阻抗为中间状态;
26、若前一检测时间对应的阻抗为中间状态或递减状态,当前检测时间对应的阻抗为递增状态,则确定当前检测时间对应的阻抗状态为阻抗上升状态。
27、于本技术一实施例中,基于每个检测时间对应的相位差状态和阻抗状态,依次确定每个检测时间对应的超声刀的当前检测状态,包括:
28、若当前检测时间对应的相位差状态为相位差上升状态,阻抗状态为阻抗上升状态,则确定当前检测时间对应的超声刀的当前检测状态为上升状态。
29、于本技术一实施例中,根据当前相位差和预设阈值确定超声刀的当前工作状态,包括:
30、若所述当前相位差的绝对值大于预设阈值,则确定所述超声刀的当前工作状态为大负载状态;
31、若所述当前相位差的绝对值小于或等于所述预设阈值,则确定所述超声刀的当前工作状态为正常负载状态。
32、于本技术一实施例中,若超声刀的当前工作状态为大负载状态,则以目标频率为起点,以预设频率上限为终点,在目标频率和预设频率的范围中,按照预设的频率间隔依次确定多个扫描频率,包括:
33、获取超声刀的当前工作频率;
34、若超声刀在切割过程中出现大负载状态,则将所述当前工作频率确定为所述目标频率;
35、若超声刀未进行切割出现大负载状态,则将预设下限频率确定为所述目标频率。
36、为实现上述目的及其他相关目的,本技术提供一种超声刀控制频率确定装置,包括:
37、数据获取模块,用于实时获取超声刀工作时的相位差和阻抗;
38、工作状态确定模块,用于根据当前相位差和预设阈值确定超声刀的当前工作状态,所述当前工作状态为正常负载状态或大负载状态;
39、扫描频率确定模块,用于若超声刀的当前工作状态为大负载状态,则以目标频率为起点,以预设频率上限为终点,在目标频率和预设频率的范围中,按照预设的频率间隔依次确定多个扫描频率;
40、控制模块,用于基于各所述扫描频率的顺序,控制超声刀从当前时刻开始依次按照所述扫描频率分别工作预设时长,所述当前时刻为所述当前相位差的获取时间;
41、数据确定模块,用于从当前时刻开始,按照预设时间间隔,依次确定多个检测时间,并根据每个检测时间对应的相位差和阻抗,依次确定每个检测时间对应的相位差斜率和阻抗斜率;
42、当前状态确定模块,用于根据每个检测时间对应的相位差、相位差斜率以及阻抗斜率,依次确定每个检测时间对应的超声刀的当前检测状态;
43、频率确定模块,用于当所述当前检测状态为上升状态时,将超声刀当前工作的扫描频率确定为控制频率,并以所述控制频率进行频率跟踪。
44、为实现上述目的及其他相关目的,本技术还提供一种计算机可读存储介质,所述计算机可读存储介质用于存储至少一段程序代码,所述至少一段程序代码用于执行如前所述的超声刀控制频率确定方法。
45、为实现上述目的及其他相关目的,本技术还提供一种电子终端,包括:处理器及存储器;
46、所述存储器用于存储计算机程序,所述处理器用于执行所述存储器存储的计算机程序,以使所述终端执行如前所述的超声刀控制频率确定方法。
47、如上所述,本技术提供的一种超声刀控制频率确定方法、装置、介质及电子终端,具有以下有益效果:
48、本技术中的一种超声刀控制频率确定方法,该方法通过实时获取超声刀工作时的相位差和阻抗并根据当前相位差和预设阈值确定超声刀的当前工作状态,在大负载状态时,以目标频率为起点,以预设频率上限为终点,在目标频率和预设频率的范围中,按照预设的频率间隔依次确定多个扫描频率,并基于各扫描频率的顺序,控制超声刀从当前时刻开始依次按照扫描频率分别工作预设时长,并按照预设时间间隔,依次确定多个检测时间,根据每个检测时间对应的相位差和阻抗,依次确定每个检测时间对应的相位差斜率和阻抗斜率,进而依次确定每个检测时间对应的超声刀的当前检测状态,当当前检测状态为上升状态时,将超声刀当前工作的扫描频率确定为控制频率,并以控制频率进行频率跟踪。通过在超声刀大负载状态时确定控制频率,并以控制频率进行频率跟踪,可以降低超声刀在大负载状态下的报警率,进而可以达到提高手术效率的效果。
49、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!