一种自动定位人体背部图像采集方法及按摩系统与流程
本发明涉及机器人交互与运动控制,特别是一种自动定位人体背部图像采集方法及按摩系统。
背景技术:
1、目前,现有的一些按摩机器人会先采集趴在按摩床上的使用者的背部图像,然后根据采集的背部图像自动生成穴位图,根据穴位图驱动机械臂按摩使用者对应的穴位,实现自动按摩的效果。但由于使用者每次趴在床上的位置不同,因此需要服务员推动机器到适应的位置进行定位,才能使按摩机器人采集到使用者的背部图像,无法实现全自动使用,存在一定的使用不便性。
技术实现思路
1、针对上述缺陷,本发明的目的在于提出一种可以自动定位人体背部图像采集方法及按摩系统。
2、为达此目的,本发明采用以下技术方案:
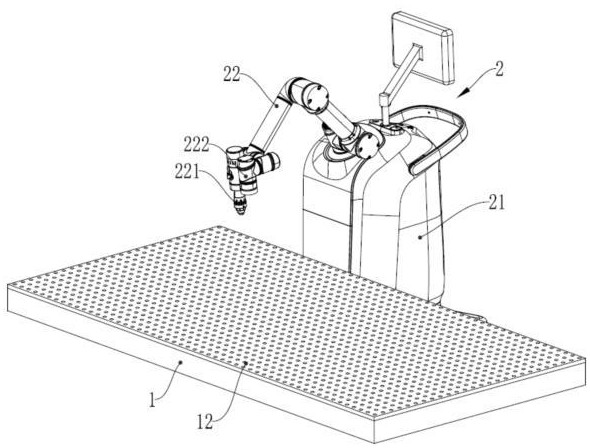
3、本发明第一方面公开了一种自动定位人体背部图像采集方法,应用在按摩系统中,所述按摩系统包括按摩床和按摩机器人,所述按摩床设有用于获取人体位置的传感组件;所述按摩机器人设有控制主机和机械臂,所述机械臂的末级关节臂设有结构光组件,所述控制主机与机械臂、所述传感组件和结构光组件电连接;
4、所述方法包括如下步骤:
5、控制结构光组件复位,使结构光组件到按摩床的距离为预设值,并使结构光组件的拍摄区域的纵向中线与按摩床纵向中线相平行;
6、获取传感组件的传感数据,根据传感数据构建出人体位置图,所述人体位置图以所述按摩床的边缘为边界,记载有人体轮廓;
7、根据人体位置图的人体轮廓识别出肩部到臀部之间的背部区域;
8、根据所述背部区域,确定所述背部区域的中心,并生成人体轮廓从肩部到臀部方向延伸的参考线,识别所述参考线与按摩床纵向中线的夹角;
9、先按所述夹角水平旋转结构光组件,使所述结构光组件拍摄区域的纵向中线与所述参考线相平行;再平移结构光组件,以使所述拍摄区域的中点与所述背部区域的中点在竖直方向重合。
10、可选地,所述传感组件包括若干个压力传感器,若干个压力传感器矩形阵列地分布在按摩床上,根据传感数据构建出人体位置图包括如下步骤:
11、初始原始图像,所述原始图像以所述按摩床的边缘为边界,且所述原始图像记载有与各个压力传感器位置一一对应的变色块;
12、筛选超出阈值的压力传感器,并将筛选出的压力传感器对应的变色块进行变色,得到人体位置初步图像;
13、于所述人体位置初步图像上进行轮廓描边处理,得到包围所有变色后的变色块的人体轮廓,得到人体位置图。
14、可选地,根据人体位置图的人体轮廓识别出肩部到臀部之间的背部区域包括如下步骤:
15、识别出人体轮廓中的肩部区域和臀部区域;
16、以肩部区域的最大宽度为第一边界,以臀部区域的最大宽度为第二边界;连接第一边界与第二边界同一侧的端点形成第三边界和第四边界;
17、以第一边界、第二边界、第三边界和第四边界围成的区域作为背部区域。
18、可选地,生成人体轮廓从肩部到臀部方向延伸的参考线包括如下步骤:
19、生成所述第一边界的中点和所述第二边界的中点;
20、从所述第一边界的中点为始点直线连接至所述第二边界的中点,得到从肩部到臀部方向延伸的参考线。
21、本发明第二方面公开了一种自动定位人体背部图像的按摩系统,应用本发明第一方面中任一项的一种自动定位人体背部图像采集方法,所述按摩系统包括按摩床和按摩机器人,所述按摩床设有用于获取人体位置的传感组件;所述按摩机器人设有控制主机和机械臂,所述机械臂的末级关节臂设有结构光组件,所述控制主机与机械臂、所述传感组件和结构光组件电连接,所述控制主机包括:
22、控制模块,用于控制结构光组件复位,使结构光组件到按摩床的距离为预设值,并使结构光组件的拍摄区域的纵向中线与按摩床纵向中线相平行;
23、获取模块,用于获取传感组件的传感数据;
24、构建模块,用于根据传感数据构建出人体位置图,所述人体位置图以所述按摩床的边缘为边界,记载有人体轮廓;
25、识别模块,用于根据人体位置图的人体轮廓识别出肩部到臀部之间的背部区域;
26、识别模块还用于根据所述背部区域确定所述背部区域的中心,并生成人体轮廓从肩部到臀部方向延伸的参考线,识别所述参考线与所述按摩床纵向中线的夹角;
27、控制模块还用于先控制结构光组件旋转所述夹角,使所述结构光组件拍摄区域的纵向中线与所述参考线相平行;再控制结构光组件平移,以使所述拍摄区域的中点与所述背部区域的中点在竖直方向重合。
28、可选地,所述传感组件包括若干个压力传感器,若干个压力传感器矩形阵列地分布在按摩床上,所述构建模块包括:
29、初始单元,用于初始原始图像,所述原始图像以所述按摩床的边缘为边界,且所述原始图像记载有与各个压力传感器位置一一对应的变色块;
30、筛选单元,用于筛选超出阈值的压力传感器,并将该压力传感器对应的变色块进行变色,得到人体位置初步图像;
31、轮廓描边单元,用于在所述人体位置初步图像上进行轮廓描边处理,得到包围所有变色后的变色块的人体轮廓,得到人体位置图。
32、可选地,识别模块包括:
33、部位识别单元,用于识别出人体轮廓中的肩部区域和臀部区域;
34、边界确定单元,以人体肩部区域的最大宽度为第一边界,以人体臀部区域的最大宽度为第二边界;连接第一边界与第二边界同一侧的端点形成第三边界和第四边界;
35、选择单元,用于以第一边界、第二边界、第三边界和第四边界围成的区域作为背部区域。
36、可选地,识别模块还包括:
37、中点识别单元,用于识别所述第一边界的中点和所述第二边界的中点;
38、参考线生成单元,用于从所述第一边界的中点为始点直线连接至所述第二边界的中点,得到从肩部到臀部方向延伸的参考线。
39、本发明第三方面公开了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本发明第一方面任一项所述的方法。
40、本发明第四方面公开了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,该程序被处理器执行时实现本发明第一方面任一项所述的方法。
41、本发明提供的技术方案可以包括以下有益效果:
42、在本发明中,先通过使用者趴在按摩床上产生的传感数据构建出人体位置图,根据人体位置图识别出肩部到臀部之间的背部区域。然后确定背部区域的中心,通过控制机械臂带动结构光组件移动或控制按摩机器人整体移动,使结构光组件的拍摄区域的中点与所述背部区域的中点在竖直方向重合。如此实现结构光组件自动定位在人体背部的正上方,实现自动定位在人体背部的正上方,无需工作人员推动按摩机器人移动或控制机械臂移动,达到全自动使用的效果,提高按摩机器人的使用便利性。
43、其中,由于使用者趴在按摩床时,使用者有可能是倾斜趴着的,即使用者的身高方向与按摩床纵向中线有一定的偏差,如此,尽管拍摄区域的中点与背部区域的中点在竖直方向重合,当使用者倾斜趴着时,会出现部分背部超出拍摄区域,导致无法完全采集到使用者的背部,不利于按摩机器人后续线路规划。为此,本发明生成人体轮廓从肩部到臀部方向延伸的参考线,识别所述参考线与所述按摩床纵向中线的夹角,按所述夹角水平旋转结构光组件,使所述结构光组件拍摄区域的纵向中线与所述参考线相平行。即结构光组件根据使用者倾斜的角度旋转拍摄区域。如此,尽管使用者倾斜趴着,也能完整地采集到使用者的背部,以便于后续线路规划,无需用户调整趴姿,再重新采集。
44、进一步,值得说明的是,由于机械臂水平旋转结构光组件时,并不会以结构光组件的拍摄区域的中心进行旋转,因此,机械臂水平旋转结构光组件后,结构光组件的拍摄区域的中心会移动。若先平移结构光组件使所述拍摄区域的中点与所述背部区域的中点在竖直方向重合,再按所述夹角水平旋转结构光组件,会导致结构光组件的拍摄区域的中点与所述背部区域的中点不再竖直方向重合,需要再次平移结构光组件。在本发明的实施例中,采用先旋转后平移的顺序,可减少平移结构光组件的次数,以利于快速定位。
- 还没有人留言评论。精彩留言会获得点赞!