一种髋关节置换手术执行器和骨科机器人的制作方法
本发明属于医疗器械领域,涉及一种髋关节置换手术执行器和骨科机器人。
背景技术:
1、目前治疗髋关节病变时通常采用人工髋关节假体置换手术,手术过程利用安放杆将臼杯移动至病变处,敲击安放杆将臼杯以压配方式紧固在病变处,再将臼杯脱离安放杆,使臼杯替换患者体内已发生病变的股骨头,该过程由安放设备实现。
2、安放设备包括臼杯和安放杆,臼杯随安放杆移动,在臼杯脱落过程中,操作安放杆将臼杯脱落,这需要较大的安放杆操作空间,对于仰卧位的人体来说操作十分不便,因为人体处于仰卧位时髋臼窝与病床之间的空间有限;现有安放杆通常为末端执行器的一部分,安放杆受机械臂的驱动,利用安放杆将臼杯脱落极大可能会与末端执行器或机械臂的位置发生干涉;另外,常规臼杯脱落过程存在操作繁琐,难度大的问题。
3、常规安放杆为直柄,因为不同人体肌肉分布不同,部分人体在进行手术过程中,被切开的肌肉会从切面突出干扰到直柄安放杆的进入,同时安放杆会剐蹭人体例如肌肉等软组织,为了避免这种情况出现,采用传统的直柄安放杆进行手术时,为了达到安放杆能够顺利进入的目的,需要在人体上切开一个较大的创面以便于安放杆避开肌肉组织调节进入角度,但较大的创面不便于病人的术后恢复,存在给人体带来的伤害较大等负面影响。
技术实现思路
1、本发明为了克服至少一个现有技术的不足,提供一种髋关节置换手术执行器和骨科机器人。
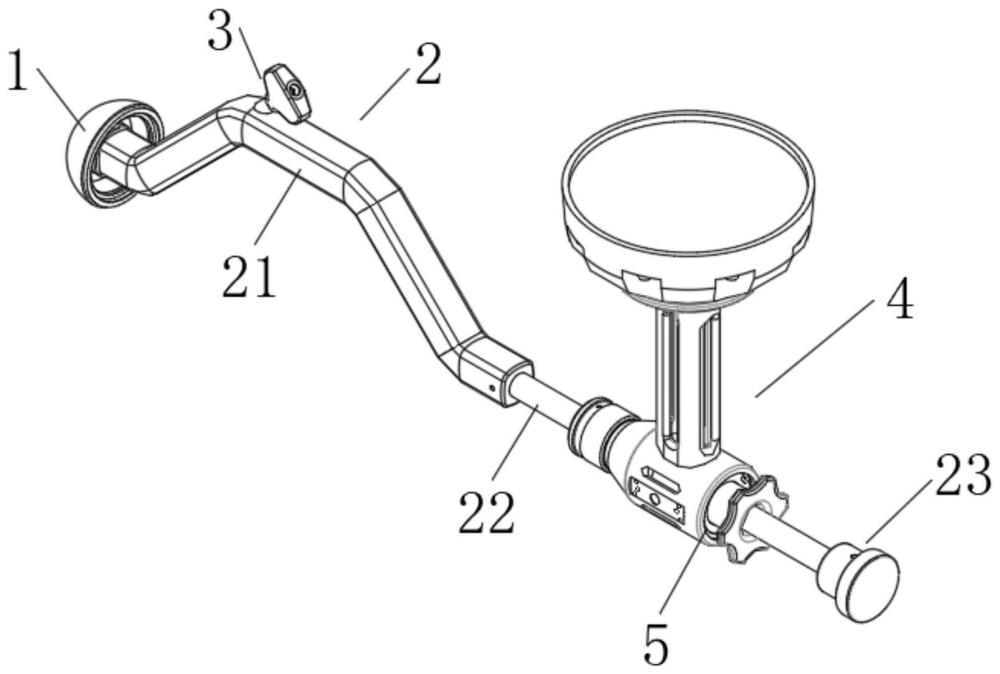
2、为了实现上述目的,本发明采用以下技术方案:一种髋关节置换手术执行器和骨科机器人,包括臼杯、安放杆、安放装置和末端连接器,末端连接器与机械臂连接,末端连接器设置在安放杆,安放杆包括弯杆和连接轴,安放装置设置在弯杆,安放装置与臼杯可拆卸连接,弯杆与连接轴可拆卸连接,连接轴设有敲击平台。
3、进一步的,所述安放装置包括安放组件和连接组件,连接组件与安放组件连接,连接组件与安放组件同步运动,连接组件和臼杯可拆卸连接。
4、进一步的,所述臼杯设有安装端,连接组件与安装端螺纹连接。
5、进一步的,所述连接组件包括连杆、联轴器和端块,连杆与安放组件连接,连杆与联轴器转动连接,端块与联轴器连接,端块贯穿安放杆并与臼杯螺纹连接。
6、进一步的,所述连杆的中心轴线与联轴器的中心轴线所成角度范围为(135±15)°。
7、进一步的,所述连接轴的中心轴线与臼杯的中心轴线共线。
8、进一步的,所述弯杆为多折弯结构,弯杆包括第一折弯杆、第二折弯杆和第三折弯杆,第一折弯杆、第二折弯杆和第三折弯杆依次连接,第一折弯杆与臼杯可拆卸连接,第三折弯杆与连接轴可拆卸连接。
9、进一步的,所述第二折弯杆与连接轴平行设置,弯杆与连接轴之间的间距范围为(128±20)mm,所述第一折弯杆与臼杯所成角度范围设为(135±15)°,第一折弯杆与第二折弯杆所成角度范围设为(135±15)°,第二折弯杆与第三折弯杆所成角度范围设为(135±15)°,第三折弯杆与连接轴所成角度范围设为(135±15)°。
10、进一步的,所述弯杆设有开口的空腔,安放装置的连接组件位于空腔。
11、一种骨科机器人,包括所述的末端执行器。
12、综上所述,本发明的有益之处在于:
13、1)本发明利用安放装置实现臼杯脱落,操作仅涉及安放装置与臼杯,可有效防止与相关结构产生干涉,且通过旋转部旋转实现臼杯脱落,需要的操作空间小,可适应不同的体位。
14、2)本发明臼杯与安放装置可拆卸连接,在臼杯打入髋臼窝并利用压配紧紧固定在该位置后,转动安放组件,并带动连接组件同步转动,解除连接组件与臼杯之间的螺纹连接,使臼杯与连接组件分离,臼杯位于髋臼窝,安放装置退出该位置,从而实现臼杯的安放,操作简单方便,可大大提高臼杯的安放效率。
15、3)本发明设置具有弯杆的安放杆,在安放杆进入过程中,通过弯杆规避肌肉组织以及内部的骨骼,因此只需要在人体上切开一个较小的创面即可使安放杆顺利进入,大大降低对人体带来的负面影响。
16、4)本发明在安放杆设置开口的空腔,不仅可以减轻安放杆的重量,便于安放杆的移动,同时方便清洗。
17、5)本发明设置连接轴的中心轴线与臼杯的中心轴线共线,便于臼杯受力。
技术特征:
1.一种髋关节置换手术执行器人,其特征在于:包括臼杯、安放杆、安放装置和末端连接器,末端连接器与机械臂连接,末端连接器设置在安放杆,安放杆包括弯杆和连接轴,安放装置设置在弯杆,安放装置与臼杯可拆卸连接,弯杆与连接轴可拆卸连接,连接轴设有敲击平台。
2.根据权利要求1所述的一种髋关节置换手术执行器人,其特征在于:所述安放装置包括安放组件和连接组件,连接组件与安放组件连接,连接组件与安放组件同步运动,连接组件和臼杯可拆卸连接。
3.根据权利要求2所述的一种髋关节置换手术执行器人,其特征在于:所述臼杯设有安装端,连接组件与安装端螺纹连接。
4.根据权利要求2所述的一种髋关节置换手术执行器人,其特征在于:所述连接组件包括连杆、联轴器和端块,连杆与安放组件连接,连杆与联轴器转动连接,端块与联轴器连接,端块贯穿安放杆并与臼杯螺纹连接。
5.根据权利要求4所述的一种髋关节置换手术执行器人,其特征在于:所述连杆的中心轴线与联轴器的中心轴线所成角度范围为(135±15)°。
6.根据权利要求1所述的一种髋关节置换手术执行器人,其特征在于:所述连接轴的中心轴线与臼杯的中心轴线共线。
7.根据权利要求1所述的一种髋关节置换手术执行器人,其特征在于:所述弯杆为多折弯结构,弯杆包括第一折弯杆、第二折弯杆和第三折弯杆,第一折弯杆、第二折弯杆和第三折弯杆依次连接,第一折弯杆与臼杯可拆卸连接,第三折弯杆与连接轴可拆卸连接。
8.根据权利要求7所述的一种髋关节置换手术执行器人,其特征在于:所述第二折弯杆与连接轴平行设置,弯杆与连接轴之间的间距范围为(128±20)mm,所述第一折弯杆与臼杯所成角度范围设为(135±15)°,第一折弯杆与第二折弯杆所成角度范围设为(135±15)°,第二折弯杆与第三折弯杆所成角度范围设为(135±15)°,第三折弯杆与连接轴所成角度范围设为(135±15)°。
9.根据权利要求1所述的一种髋关节置换手术执行器人,其特征在于:所述弯杆设有开口的空腔,安放装置的连接组件位于空腔。
10.一种骨科机器人,其特征在于:包括权利要求1-9任一项所述的末端执行器。
技术总结
本发明公开了一种髋关节置换手术执行器和骨科机器人,包括臼杯、安放杆、安放装置和末端连接器,末端连接器与机械臂连接,末端连接器设置在安放杆,安放杆包括弯杆和连接轴,安放装置设置在弯杆,安放装置与臼杯可拆卸连接,弯杆与连接轴可拆卸连接,连接轴设有敲击平台,本发明利用安放装置实现臼杯脱落,操作仅涉及安放装置与臼杯,可有效防止与相关结构产生干涉,且通过旋转部旋转实现臼杯脱落,需要的操作空间小,可适应不同的体位。
技术研发人员:蒋浩杰,童睿,王婧,徐子昂,张巍,洪洁,沈丽萍
受保护的技术使用者:杭州三坛医疗科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!