双极手术工具及手术机器人系统的制作方法
本公开涉及医疗器械领域,尤其涉及一种双极手术工具及手术机器人系统。
背景技术:
1、微创手术具有创伤小、出血少、恢复快等优点,在临床手术中已得到越来越广泛的应用。在微创手术中,通常会使用双极手术工具直接插入或通过套管插入患者的小切口或自然孔口,然后利用双极电能手术工具端部的钳头进行夹取、电凝止血等操作,简化了切割、剥离、凝血动作的操作流程,提高了手术操作的精度。
2、双极手术工具包括两个钳头,其中一个钳头作为主动电极,另一个钳头作为返回电极,两个电极通过导线与电手术发生器连接,在抓持生物组织时,可以向组织施加高频高压交流电。组织在电流作用下产生电阻热,从而升温。在高温下组织中的蛋白质变性粘连,从而闭合血管,实现止血功能。
3、但是现有的双极手术工具在手术操作中存在热扩散和组织粘结等问题。其中热扩散会导致周围组织受热而被不可逆的破坏,从而导致不理想的手术效果(尤其是在神经手术中)。组织与电极粘结后,在分离粘连的电极和组织时通常导致出血,并且残留在电极表面的组织会影响双极手术工具在后续手术中的能量传递。
技术实现思路
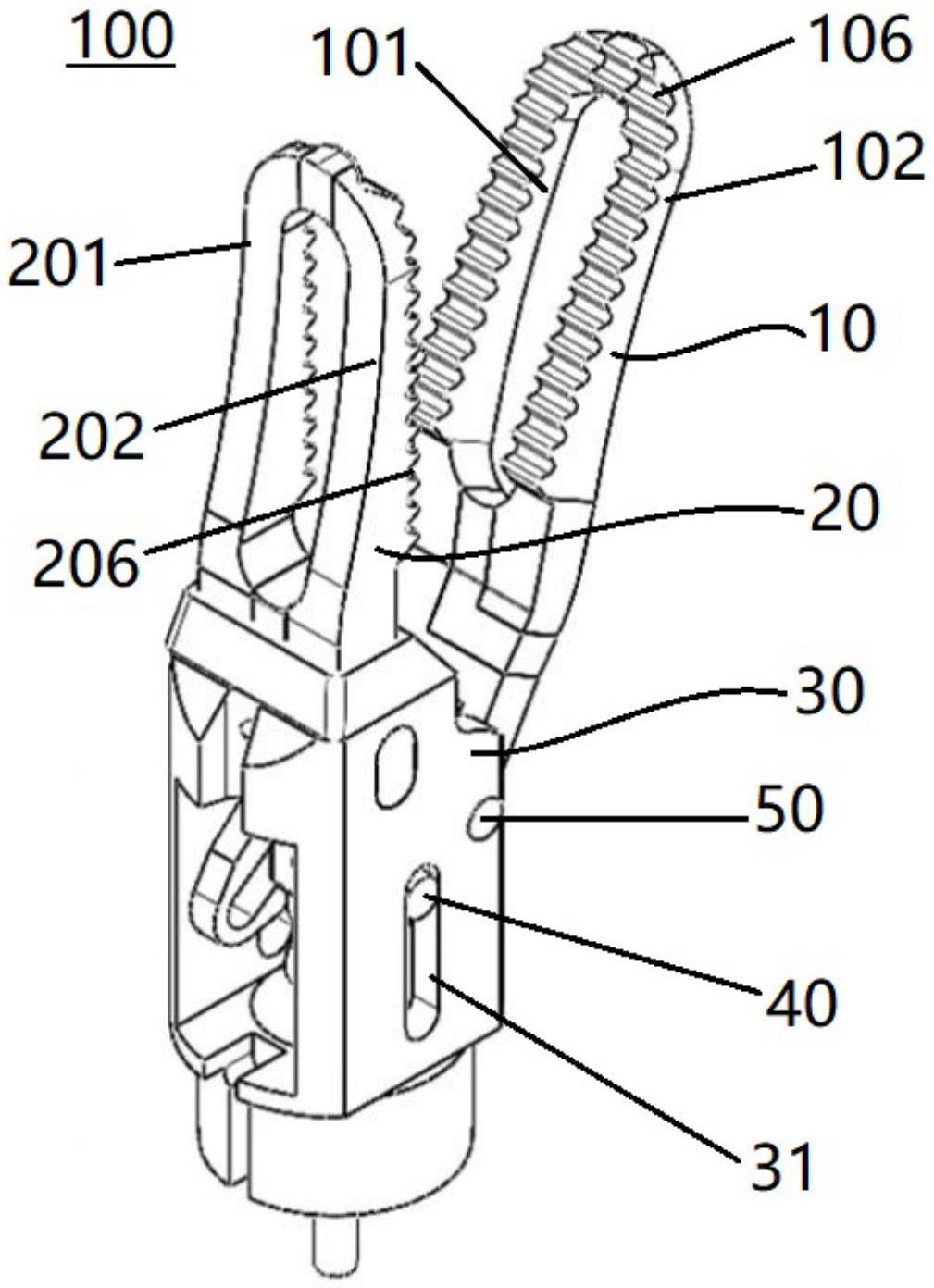
1、在一些实施例中,本公开提供了一种双极手术工具,包括:
2、第一钳头,包括沿纵向延伸的第一部分和第二部分;
3、第二钳头,所述第一钳头与所述第二钳头转动连接并且与所述第二钳头相配合,所述第二钳头包括沿纵向延伸的第三部分和第四部分,所述第三部分与所述第一部分相配合,并且所述第四部分与所述第二部分相配合;
4、所述第一钳头的第一部分形成主动电极,并且所述第一钳头的第二部分和/或所述第二钳头的第四部分形成返回电极。
5、在一些实施例中,所述第二钳头的第三部分形成主动电极,并且所述第二钳头的第四部分形成返回电极。
6、在一些实施例中,所述第一钳头的所述第一部分和所述第二部分沿横向并排设置,并且所述第二钳头的第三部分和所述第四部分沿横向并排设置。
7、在一些实施例中,所述第一钳头的所述第一部分的内侧设有倒角结构;和/或
8、所述第一钳头的所述第二部分的内侧设有倒角结构;和/或
9、所述第二钳头的所述第三部分的内侧设有倒角结构;和/或
10、所述第二钳头的所述第四部分的内侧设有倒角结构;和/或
11、所述第一钳头和所述第二钳头相对的夹持面设有波形齿纹。
12、在一些实施例中,所述第一钳头包括第一绝缘部,所述第一绝缘部用于使所述第一部分和所述第二部分之间彼此绝缘;和/或
13、所述第二钳头包括第二绝缘部,所述第二绝缘部用于以使所述第三部分和所述第四部分之间彼此绝缘。
14、在一些实施例中,所述第一绝缘部位于所述第一部分和所述第二部分之间;和/或
15、所述第二绝缘部位于所述第三部分和所述第四部分之间。
16、在一些实施例中,所述第一绝缘部包括位于所述第一钳头远端的第一钳头远端绝缘件和位于所述第一钳头近端的第一钳头近端绝缘件;和/或
17、所述第二绝缘部包括位于所述第二钳头远端的第二钳头远端绝缘件和位于所述第二钳头近端的第二钳头近端绝缘件。
18、在一些实施例中,所述第一部分形成主动电极,所述第二部分形成第一绝缘部;
19、所述第四部分形成返回电极,所述第三部分形成第二绝缘部。
20、在一些实施例中,还包括:
21、钳头座,所述第一钳头活动设置在所述钳头座远端,所述第二钳头固定设置在所述钳头座远端。
22、在一些实施例中,所述第一钳头包括活动钳爪以及连接并支撑所述活动钳爪的钳头支撑件,所述钳头支撑件通过第一连接销与驱动机构连接,所述钳头支撑件通过第二连接销枢接于所述钳头座上。
23、在一些实施例中,所述钳头座上设有一对第一滑槽,所述钳头支撑件上设有一对第二滑槽,所述第一连接销分别滑动穿设在所述一对第一滑槽和所述一对第二滑槽内,所述第二连接销穿设在所述钳头支撑件和所述钳头座上。
24、在一些实施例中,所述一对第一滑槽包括对称设置在所述钳头座上的一对竖直滑槽,所述一对第二滑槽包括对称设置在所述钳头支撑件上的一对弧形滑槽,所述第一连接销的两端分别穿设在所述弧形滑槽和所述竖直滑槽内,并可沿所述竖直滑槽和弧形滑槽往复运动。
25、在一些实施例中,本公开还提供了一种手术机器人系统,包括如上述任意实施例中所述的双极手术工具。
技术特征:
1.一种双极手术工具,其特征在于,包括:
2.根据权利要求1所述的双极手术工具,其特征在于,所述第二钳头的第三部分形成主动电极,并且所述第二钳头的第四部分形成返回电极。
3.根据权利要求1所述的双极手术工具,其特征在于,所述第一钳头的所述第一部分和所述第二部分沿横向并排设置,并且所述第二钳头的第三部分和所述第四部分沿横向并排设置。
4.根据权利要求1所述的双极手术工具,其特征在于,
5.根据权利要求1所述的双极手术工具,其特征在于,
6.根据权利要求5所述的双极手术工具,其特征在于,
7.根据权利要求5所述的双极手术工具,其特征在于,
8.根据权利要求1所述的双极手术工具,其特征在于,
9.根据权利要求1-8中任一项所述的双极手术工具,其特征在于,还包括:
10.根据权利要求9所述的双极手术工具,其特征在于,
11.根据权利要求10所述的双极手术工具,其特征在于,
12.根据权利要求11所述的双极手术工具,其特征在于,
13.一种手术机器人系统,其特征在于,包括如权利要求1-12中任一项所述的双极手术工具。
技术总结
本公开涉及医疗器械领域,公开一种双极手术工具及手术机器人系统。双极手术工具包括第一钳头和第二钳头。第一钳头包括沿纵向延伸的第一部分和第二部分。第一钳头与第二钳头转动连接并且与第二钳头相配合,第二钳头包括沿纵向延伸的第三部分和第四部分,第三部分与第一部分相配合,并且第四部分与第二部分相配合,第一钳头的第一部分形成主动电极,并且第一钳头的第二部分和/或第二钳头的第四部分形成返回电极。通过将主动电极和返回电极分别设置在两侧或者将主动电极和返回电极分别设置在斜对角,以减小通过周围组织的电流,从而降低了周围组织的发热,减小热扩散和组织粘结。
技术研发人员:徐凯,丁跃,吴百波,朱传祥
受保护的技术使用者:北京术锐机器人股份有限公司
技术研发日:20230131
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!