血管介入手术机器人及其注射模块的制作方法
本申请涉及医疗器械领域,具体而言,涉及一种血管介入手术机器人及其注射模块。
背景技术:
1、血管介入技术是近10年来逐渐兴起的有效的治疗方法,其创伤小,操作简便,介入部位准确,使一些不能耐受大手术及耐药患者得到了治疗,血管介入手术在恶性滋养细胞肿瘤治疗中日益增多。
2、目前血管介入手术需要小剂量注射造影剂,而注射过程是医生手动使用医用针筒注入,造影剂的注射量及注射速度无法做到较为精确地掌控,使得造影剂的注射效率较低。
技术实现思路
1、本申请的目的包括,例如,提供了一种血管介入手术机器人及其注射模块,其能够精确地掌控造影剂的注射量及注射速度,提升造影剂的注射效率。
2、本申请的实施例可以这样实现:
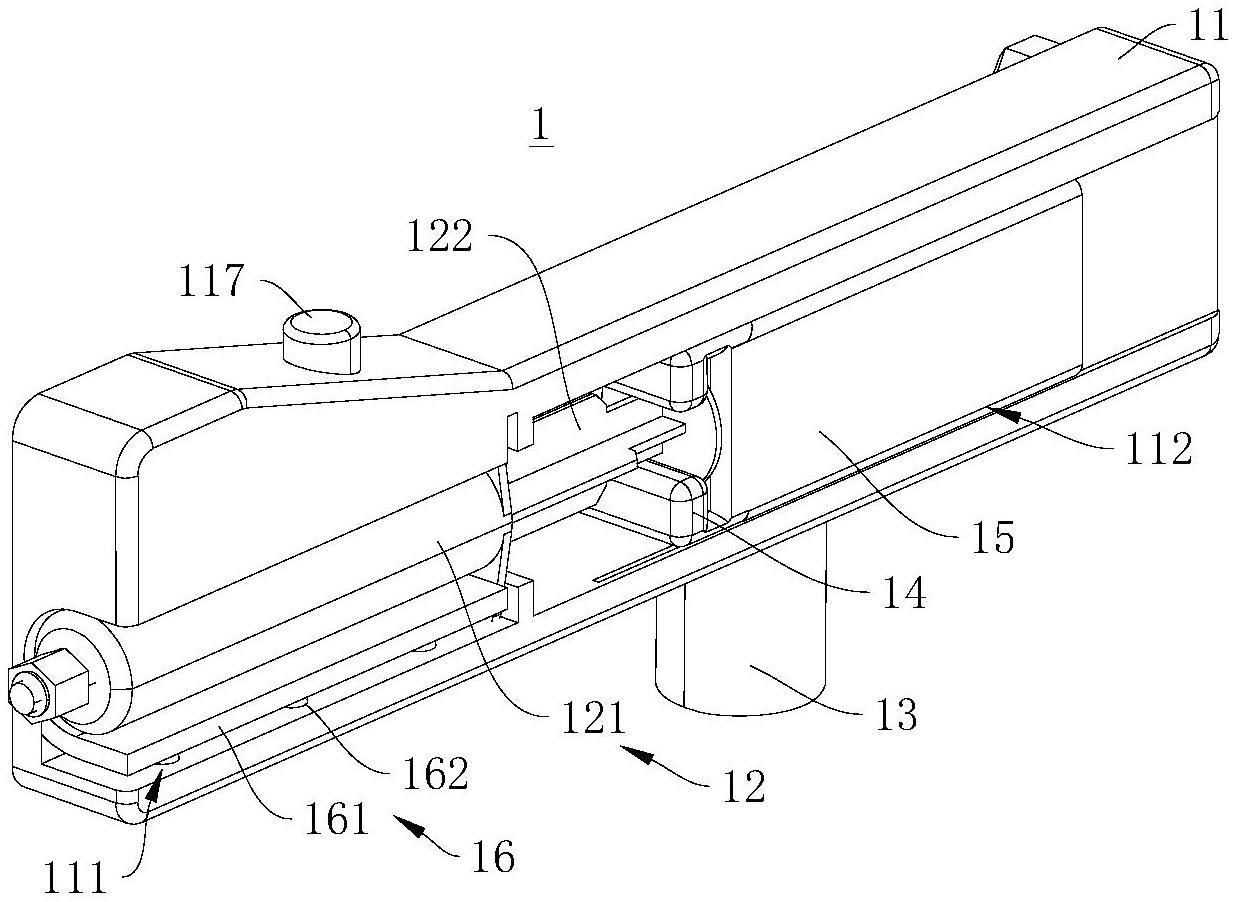
3、本申请的实施例提供了一种用于血管介入手术机器人的注射模块,其包括壳体和驱动器;所述壳体内用于设置注射器;所述驱动器至少部分设置于所述壳体内,所述驱动器用于与所述注射器的芯杆相连接,以驱使所述注射器的芯杆在所述注射器的针筒内移动。
4、可选的,所述壳体内设置有第一安装腔和第二安装腔,所述第一安装腔用于安装所述针筒,所述第二安装腔用于供所述芯杆伸入。
5、可选的,所述驱动器包括传动组件和驱动件,所述驱动件和所述传动组件传动连接,所述传动组件用于与所述芯杆相连接。
6、可选的,所述传动组件包括齿轮和齿条,所述齿条可活动地设置于所述第二安装腔内,所述齿条用于与所述芯杆相连接;所述齿轮与所述齿条相配合,所述驱动件与所述齿轮相连接,以驱动所述齿轮转动。
7、可选的,所述注射模块还包括推拉板,所述齿条的一端与所述推拉板卡接,所述芯杆与所述推拉板卡接。
8、可选的,所述齿条和所述推拉板中的一者上设置有第一卡槽,另一者上设置有卡块,所述第一卡槽与所述卡块相卡接;并且/或者,所述推拉板上设置有第二卡槽,所述芯杆与所述第二卡槽相卡接。
9、可选的,所述齿条上设置有第一滑动部件,所述第二安装腔的内壁上设置有第二滑动部件,所述第一滑动部件与所述第二滑动部件滑动配合。
10、可选的,所述第一滑动部件和所述第二滑动部件中的其中一者为第一滑块,另一者为第一滑槽。
11、可选的,所述注射模块还包括挡板,所述挡板与所述推拉板相连接,所述挡板用于遮挡所述齿条。
12、可选的,所述挡板上设置有第三滑动部件,所述第二安装腔的内壁上设置有第四滑动部件,所述第三滑动部件和所述第四滑动部件滑动配合。
13、可选的,所述第三滑动部件和所述第四滑动部件中的其中一者为第二滑块,另一者为第二滑槽。
14、可选的,所述注射模块还包括抵持件,所述抵持件可活动地设置于所述第一安装腔内,所述抵持件用于配合所述第一安装腔的内壁以对所述针筒进行抵持。
15、可选的,所述抵持件包括支撑板、活动轴和支撑弹簧;所述支撑板与所述活动轴相连接,所述活动轴可活动地设置于所述第一安装腔内,所述支撑弹簧套设于所述活动轴上,且所述支撑弹簧的两端分别连接所述支撑板以及所述第一安装腔的内壁,所述支撑板用于配合所述第一安装腔的内壁以对所述针筒进行抵持。
16、可选的,所述壳体上设置有气泡传感器,所述气泡传感器用于检测所述针筒内的气泡情况。
17、可选的,所述壳体上设置有安装槽,所述安装槽的内壁上开设有与所述第一安装腔相连通的连通口,所述气泡传感器设置于所述安装槽内,所述气泡传感器用于通过所述连通口检测所述针筒内的气泡情况。
18、可选的,所述连通口内设置有透明盖板,所述气泡传感器通过所述透明盖板检测所述针筒内的气泡情况。
19、可选的,所述壳体上设置有第一安装件,所述第一安装件用于与血管介入手术机器人的本体或手术床上的第二安装件配合以固定所述壳体。
20、可选的,所述壳体上开设有第一通孔和第二通孔,所述第一通孔与所述第二通孔相连通;所述第一安装件至少部分设置于所述第一通孔内,所述第二通孔用于供所述本体或所述手术床上的第二安装件伸入以与所述第一安装件配合以固定所述壳体。
21、可选的,所述第一通孔的内部设置有连接弹簧,所述连接弹簧的一端与所述第一通孔的内壁相连接,所述连接弹簧的另一端与所述第一安装件的底部相连接;所述第一安装件上开设有卡接孔,所述卡接孔和所述第二通孔连通,所述卡接孔内设置有凸起,所述凸起用于与所述第二安装件的凹槽相配合。
22、可选的,所述壳体上设置有定位件,所述定位件用于与外部的血管介入手术机器人的本体或手术床上的定位槽配合以对所述壳体进行定位。
23、另外,本申请的实施例还提供了一种血管介入手术机器人,包括:上述任一项实施例中所述的注射模块;主端操作台,包括控制器,所述控制器配置成能够控制所述驱动器的动作。
24、本申请实施例的血管介入手术机器人及其注射模块的有益效果包括,例如:壳体内设置注射器和驱动器后,当需要注射造影剂时,启动驱动器,驱动器便驱使注射器的芯杆在针筒内移动完成注射,相比原有医生手动注入造影剂的注射方式,该设置驱动器的注射方式能够精确地掌控造影剂的注射量及注射速度,提升造影剂的注射效率。
技术特征:
1.一种用于血管介入手术机器人的注射模块,其特征在于,包括:
2.根据权利要求1所述的注射模块,其特征在于,所述壳体(11)内设置有第一安装腔(111)和第二安装腔(112),所述第一安装腔(111)用于安装所述针筒(121),所述第二安装腔(112)用于供所述芯杆(122)伸入。
3.根据权利要求2所述的注射模块,其特征在于,所述驱动器(13)包括传动组件和驱动件(133),所述驱动件(133)和所述传动组件传动连接,所述传动组件用于与所述芯杆(122)相连接。
4.根据权利要求3所述的注射模块,其特征在于,所述传动组件包括齿轮(131)和齿条(132),所述齿条(132)可活动地设置于所述第二安装腔(112)内,所述齿条(132)用于与所述芯杆(122)相连接;所述齿轮(131)与所述齿条(132)相配合,所述驱动件(133)与所述齿轮(131)相连接,以驱动所述齿轮(131)转动。
5.根据权利要求4所述的注射模块,其特征在于,所述注射模块(1)还包括推拉板(14),所述齿条(132)的一端与所述推拉板(14)卡接,所述芯杆(122)与所述推拉板(14)卡接。
6.根据权利要求5所述的注射模块,其特征在于,所述齿条(132)和所述推拉板(14)中的一者上设置有第一卡槽(141),另一者上设置有卡块(1321),所述第一卡槽(141)与所述卡块(1321)相卡接;并且/或者,
7.根据权利要求4所述的注射模块,其特征在于,所述齿条(132)上设置有第一滑动部件,所述第二安装腔(112)的内壁上设置有第二滑动部件,所述第一滑动部件与所述第二滑动部件滑动配合。
8.根据权利要求7所述的注射模块,其特征在于,所述第一滑动部件和所述第二滑动部件中的其中一者为第一滑块(1121),另一者为第一滑槽(1322)。
9.根据权利要求5所述的注射模块,其特征在于,所述注射模块(1)还包括挡板(15),所述挡板(15)与所述推拉板(14)相连接,所述挡板(15)用于遮挡所述齿条(132)。
10.根据权利要求9所述的注射模块,其特征在于,所述挡板(15)上设置有第三滑动部件,所述第二安装腔(112)的内壁上设置有第四滑动部件,所述第三滑动部件和所述第四滑动部件滑动配合。
11.根据权利要求10所述的注射模块,其特征在于,所述第三滑动部件和所述第四滑动部件中的其中一者为第二滑块(151),另一者为第二滑槽(1122)。
12.根据权利要求2所述的注射模块,其特征在于,所述注射模块(1)还包括抵持件(16),所述抵持件可活动地设置于所述第一安装腔(111)内,所述抵持件(16)用于配合所述第一安装腔(111)的内壁以对所述针筒(121)进行抵持。
13.根据权利要求12所述的注射模块,其特征在于,所述抵持件(16)包括支撑板(161)、活动轴(162)和支撑弹簧;
14.根据权利要求2所述的注射模块,其特征在于,所述壳体(11)上设置有气泡传感器(114),所述气泡传感器(114)用于检测所述针筒(121)内的气泡情况。
15.根据权利要求14所述的注射模块,其特征在于,所述壳体(11)上设置有安装槽(113),所述安装槽(113)的内壁上开设有与所述第一安装腔(111)相连通的连通口(1131),所述气泡传感器(114)设置于所述安装槽(113)内,所述气泡传感器(114)用于通过所述连通口(1131)检测所述针筒(121)内的气泡情况。
16.根据权利要求15所述的注射模块,其特征在于,所述连通口(1131)内设置有透明盖板(1132),所述气泡传感器(114)通过所述透明盖板(1132)检测所述针筒(121)内的气泡情况。
17.根据权利要求1至16中任一项所述的注射模块,其特征在于,所述壳体(11)上设置有第一安装件(117),所述第一安装件(117)用于与血管介入手术机器人的本体(2)或手术床(3)上的第二安装件配合以固定所述壳体(11)。
18.根据权利要求17所述的注射模块,其特征在于,所述壳体(11)上开设有第一通孔(115)和第二通孔(116),所述第一通孔(115)与所述第二通孔(116)相连通;所述第一安装件(117)至少部分设置于所述第一通孔(115)内,所述第二通孔(116)用于供所述本体(2)或所述手术床(3)上的第二安装件伸入以与所述第一安装件(117)配合以固定所述壳体(11)。
19.根据权利要求18所述的注射模块,其特征在于,所述第一通孔(115)的内部设置有连接弹簧,所述连接弹簧的一端与所述第一通孔(115)的内壁相连接,所述连接弹簧的另一端与所述第一安装件(117)的底部相连接;
20.根据权利要求1至16中任一项所述的注射模块,其特征在于,所述壳体(11)上设置有定位件(118),所述定位件(118)用于与外部的血管介入手术机器人的本体(2)或手术床(3)上的定位槽配合以对所述壳体(11)进行定位。
21.一种血管介入手术机器人,其特征在于,包括:
技术总结
本申请的实施例提供了一种血管介入手术机器人及其注射模块,涉及医疗器械领域。该用于血管介入手术机器人的注射模块包括壳体和驱动器;壳体内用于设置注射器;驱动器至少部分设置于壳体内,驱动器用于与注射器的芯杆相连接,以驱使注射器的芯杆在注射器的针筒内移动,其能够精确地掌控造影剂的注射量及注射速度,提升造影剂的注射效率。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京万思医疗器械有限公司
技术研发日:20230614
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!