基于4D打印技术的仿生藤蔓食道手术辅助牵引工具及其成型方法
本发明涉及本发明涉及4d打印,特别涉及一种基于4d打印技术的仿生藤蔓食道手术辅助牵引工具及其成型方法。
背景技术:
1、食管癌(又称食道癌)是全世界范围高发并且严重威胁人类健康及生命的恶性肿瘤之一,目前针对食道癌手术较为普遍的有药物治疗、放射性治疗和手术切除治疗,对于药物治疗,普遍周期较长,患者病情具有不可控因素,且易复发等缺点,对于放射性治疗,费用较为高昂,对患者身体会造成不可逆的影响,加剧患者痛苦等缺点,目前临床上较为普遍的手段为手术切除治疗,手术治疗方法包括内镜治疗、开胸手术和胸腹腔镜手术。在食道癌的手术治疗中,胸腔镜、腹腔镜手术不仅创伤小、术后疼痛少、恢复时间短,并且可以有效减少术后肺部并发症的发生。
2、其中esd技术运用最为广泛,目前esd牵引方式主要分为以下三种:1.体位改变法(position change method):根据重力方向尝试调整患者体位,使剥离面获得理想的张力。其优点是可以提供良好的手术视野,不需要外来辅助牵引,操作简单,缺点是可供患者选择的体位有限,一定程度上限制了此方法的使用效果。2.带线钛夹法(clip-with-linemethod):在体外将线丝结扎于金属夹双侧夹臂之间,将金属夹固定夹闭在已切开边缘的病灶上,轻拉丝线用于保持适度张力,使得病灶被充分拎起,而后实施完整剥离。其优点是原理较为简单,可操作性高,材料相对较易获得。缺点为带线钛夹法的牵引方向有限,可能金属夹会脱落,对人体造成不利影响。3.体内牵引法(internal traction method)包括铅垂牵引法、夹子联合弹簧牵引法、金属夹联合橡皮环或者尼龙绳牵引法等。优点是不需要反复进镜及退镜,能够更好的暴露视野。缺点是控制较困难,剥离标本取出时容易损伤少量正常黏膜。
3、因此如何在术中取得良好手术视野,实现安全、精确切割和剥离操作的方法成为解决上述问题的关键。
4、专利号为“cn 112401950 a”提供了一种粘膜牵引装置和内窥系统,该粘膜牵引装置包括管体、第一夹子以及牵引件,第一夹子安装于管体的远端,牵引件设置有第一作用部和第二作用部,第一作用部作用于管体的远端,第二作用部用于作用于内窥镜的远端,在牵引件被牵引的情况下,管体的远端与内窥镜的远端相互靠近并保持固定,在牵引件被松开的情况下管体的远端与内窥镜的远端可各自独立活动。该内窥系统包括前述的粘膜牵引装置。该粘膜牵引装置和内窥系统可以在不增加第一夹子的前提下,保持牵引构件的牵引力,并且手术完成后,不会在人体内滞留第一夹子,减少了安全事故发生的风险。
5、专利号为“cn 109662743 a”公开了一种辅助内镜治疗的组织牵引装置,组织牵引器是两端o型圈中间连接线的哑铃型结构体;推送器包括细管前端连接前端针、后端连接握杆,从前端针后端面向内轴向开设两个管腔,管腔前端通至前端针周表面形成通孔,拉手与握杆相对移位活动连接,两根金属丝穿在前端针的管腔中,前端露出前端针周表面,组织牵引器的两端o型圈孔分别卡在金属丝前端上,金属丝后端穿过软管中空腔,穿进握杆内与拉手连接。本发明可随时根据术中需要将组织牵引器经内镜活检孔道送入内镜手术区域,无需退出内镜,联合钛夹可以实现在腔内进行精准牵引,有效降低手术操作难度,提高手术速度。
6、专利号为“cn 210009000 u”公开了一种消化内镜辅助装置,涉及医疗器械技术领域,具体为一种消化内镜辅助装置,包括套管和箱体,所述套管的表面固定连接有弹性体,所述弹性体的表面固定连接有弹性颗粒物,所述弹性体的表面开设有开口槽,所述弹性体的一端活动连接有透明环,所述箱体的底部设置有消毒水箱。该消化内镜辅助装置,通过套管套紧在结肠镜的头端,在应用结肠镜进行内镜下黏膜剥离术时,利用其自身倒刺型设计的弹性体固定了内镜头端在肠腔中的位置,并协助展平肠壁皱褶,在一定程度上减轻了结肠蠕动频繁造成的影响。同时,超出内镜头端的透明环能够为内镜下手术提供一定的操作空间,从而方便了内镜粘膜下剥离术的进行。
7、专利号为“cn 210009000 u”公开了一种牵引装置,包括夹持部和牵引部,牵引部含有封闭牵引结构,封闭牵引结构由弹性材料制成,夹持部包括夹持主体和夹臂,夹持主体能够穿过内镜的活检通道,夹臂可以夹住封闭牵引结构。不需要外力,仅依靠牵引部的弹力就能实现对切割病灶的牵引,充分暴露手术操作视野;同时可以牵拉缩小大的创面,从而方便创面进一步夹闭的牵引装置。
8、以上专利均弥补了esd牵引方式的不足,在手术过程中,起到了一个很好的辅助效果,实现了安全、精确切割和剥离操作。但是装置较为复杂,且制作使用传统的加工方法,制作过程较久,步骤较为繁琐,无法根据病患的实际情况对装置进行调整。为此本发明人使用4d打印技术,实现快速高效、定制化制作牵引装置,降低了制作成本与时间。一定程度上为患者减少等待手术时间,且制作材料采用了智能可靠、对人体温和、体积小且高度自定义的4d打印材料,对人体无毒害,保证患者安全。运用生物仿生结构,结构简单。简化手术操作,提高手术成功率的同时降低了手术成本。
技术实现思路
1、为了克服体位改变法患者选择的体位有限等缺陷,避免带线钛夹法牵引的牵引方向有限,可能金属夹会脱落,对人体造成不利影响,解决内牵引法控制较困难,剥离标本取出时容易损伤少量正常黏膜的问题,而提供一种基于4d打印技术的仿生藤蔓食道手术辅助牵引工具及其成型方法。
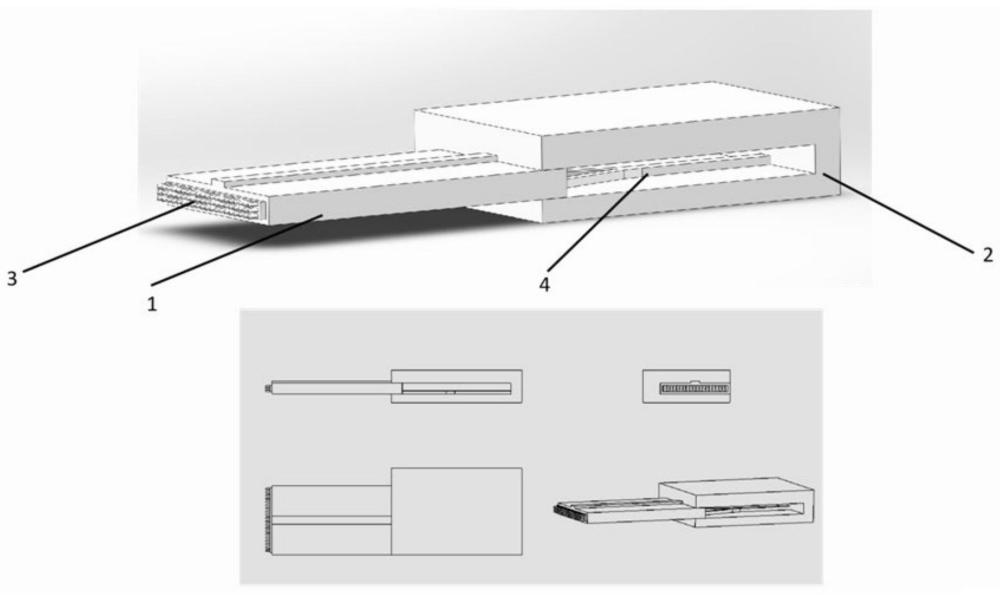
2、基于4d打印技术的仿生藤蔓食道手术辅助牵引工具,包括牵引工具前部1、牵引工具主体2、倒刺工作体3和超弹合金4,牵引工具前部1与牵引工具倒刺工作体3通过凹槽进行定位配合安装,牵引工具前部1与超弹合金4通过凹槽进行定位配合安装,牵引工具前部1和牵引工具主体2通过滑道进行定位配合安装;
3、所述牵引工具前部1包括支撑平板101、导向滑道102、倒刺存储凹槽103和超弹合金定位槽104,牵引工具前部1中导向滑道102与引工具主体2中的导向槽202进行配合定位,实现滑动装配,便于装载与卸载,牵引工具前部1中的倒刺存储凹槽103,可装载倒刺工作体3,是整个工具的工作主体,牵引工具前部1中的超弹合金定位槽104可存储超弹合金4;
4、所述牵引工具主体2包括主体件201、导向槽202和超弹合金存储槽203,牵引工具主体2中导向槽202可引导牵引工具前部1中导向滑道102进行滑动装配,超弹合金存储槽203可承载牵引工具超弹合金4;
5、所述倒刺工作体3包括倒刺体301和倒刺支撑体302,牵引工具倒刺工作体3中的倒刺支撑体302可装载入牵引工具前部1中;
6、所述超弹合金4包括仿生爪形工作体401和卡紧托402,仿生爪形工作体401可存储入牵引工具前部1,实现配合定位,卡紧托402可卡紧引工具主体2,确保合金不掉入人体内部,保证正常工作;
7、基于4d打印技术的仿生藤蔓食道手术辅助牵引工具,包括仿生杠板归倒刺层结构,所述仿生杠板归倒刺层结构为耦合仿生,所述仿生杠板归倒刺层结构包括倒刺承载体5和倒刺工作体6,倒刺承载体5与倒刺工作体6通过凹槽进行定位配合;
8、所述倒刺承载体5包括承载倒刺主体501和倒刺存储凹槽502,倒刺存储凹槽502可存储入倒刺工作体6,实现配合定位;
9、所述倒刺工作体6包括倒刺支撑板601和倒刺结构602,倒刺支撑板601可存储入倒刺承载体5中,实现简单定位配合,倒刺结构602在手术过程起关键性作用。
10、基于4d打印技术的仿生藤蔓食道手术辅助牵引工具的成型方法,用于制备仿生藤蔓食道手术辅助牵引工具,具体成型步骤为:
11、步骤一、选取超弹合金片材料镍钛合金;
12、步骤二、制备4d打印材料,打印材料配比为,聚氨酯96~97份,热致变色材料2~3份,硬脂酰氨1~2份以及聚乙酸蜡1~2份。先将以上材料颗粒按比例干燥,随后置入球磨机中进行混合,混合完成之后取出混合物,用双螺杆挤出机制备出4d打印材料丝材;
13、步骤三、通过ct扫描,根据患者食道病变位置和病变情况,设计4d打印技术的仿生藤蔓食道手术辅助牵引工具尺寸参数;
14、步骤四、在creo中根据设计的工具尺寸参数,构建辅助牵引工具模型,需在牵引工具模型中按超弹合金片尺寸预留空间;
15、步骤五、将所建模型切片并存为stl格式,输入打印系统中;
16、步骤六、钩仿藤蔓牵引结构卷曲过程吸收患者热量为q,理想卷曲角度为δ,仿藤蔓牵引结构初始温度为t1,恢复所需时间为δt,则仿藤蔓牵引结构与患者胃内外表层接触δt后,获得的能量为:
17、q=q 1
18、仿藤蔓牵引结构温度的变化量δt为:
19、
20、由1式得:
21、
22、则δt内,仿藤蔓牵引结构卷曲变形的平均速率为v,则对应的形变为:
23、δ=vδt 4
24、步骤七、模型打印完成,将打印好的实体模型冷却硬化后从平台上取下;
25、步骤八、根据手术部位以及病患实际情况,确定仿杠板归倒刺的数量、排布与尺寸,并根据所确定的倒刺数量、排布与尺寸建立其模具的三维模型;
26、步骤九、所所述的模具采用双光子聚合增材制造技术,增材制造成型;
27、步骤十、将光敏树脂灌入到模具中,待其稳定后,将其与仿藤蔓牵引工具结合,采用用紫外线对其进行照射固化,使得倒刺层与勾爪主体相结合;
28、进一步的,采用球磨机中进行混合以2500r/min的速度搅拌浆料使之充分混合,混合时间为3.5小时,直至没有气泡产生。
29、进一步的,所述激励变形温度应根据患者食道表层组织温度进行设计,激励温度参数范围为人体食道正常体温36.5~37.2℃;
30、进一步的,所述以温度为激励的材料还可选用pla、pcl,其中pcl的玻璃化转变温度为-60~65℃,均可在人体正常体温下变形。
31、进一步的,光敏树脂材料可采用simpneed uv-pure树脂、formlabs的牙科sg材料,raydent光敏树脂等生物相容性的光敏树脂。
32、进一步的,将仿杠板归倒刺层与仿藤蔓牵引结构结合的粘结剂为光敏树脂,通过紫外线固化而成;
33、进一步的,光固化打印机的打印层厚为20um,曝光能量密度为90mw/cm2,单层曝光时间为1.5s。
34、本发明的有益效果:
35、本发明公开了一种基于4d打印技术的仿生藤蔓食道手术辅助牵引工具,包括由4d打印技术制成的仿藤蔓牵引工具和通过光敏树脂固化制成的仿生杠板归倒刺层(耦合仿生),仿生杠板归倒刺层与仿藤蔓牵引工具固定连接,仿藤蔓牵引工具在常温状态下为平直状态,在人体内部温度激励下,可以自由发生弯曲,从而实现辅助牵引功能,牵引工具内部镂空,可以放入超弹合金,利用超弹合金自身的弹力将牵引工具变形,手术过程中仿杠板归倒刺层刺入食道并与其固定连接,在体温激励下仿藤蔓牵引工具变软,可自由变形,在超弹合金的作用下,仿藤蔓牵引工具和仿生杠板归倒刺层均发生卷曲并牵引病灶处的食道处。相比于传统的esd牵引工具,本发明操作易上手,牵引角度可动范围大且可承受一定牵引力,不易损伤食道粘膜组织,制作简单,无需外界供能,可根据病灶情况实现定制化,减轻病患痛苦,降低手术风险。
36、本发明结构简洁,由单独部件组合,部件形状简单,部件与部件之间由机械结构进行配合。本发明利用可变形材料与超弹合金结合,牵引力方向可为多向,且牵引力由超弹合金自身弹性势能提供,无需外界输入能量,节约能源成本,牵引力大且可控。本发明部件可进行替换,损坏时无需整体结构更换,只需更换算坏部件,更为方便,节约成本。本发明通过4d打印技术得到仿生藤蔓食道手术辅助牵引工具取代了传统esd牵引方式中的夹子,可进行回收,防止掉入人体内部,造成伤害。在手术过程,辅助胃镜进入人体中,提高了手术的成功率。基于4d打印技术的仿生藤蔓食道手术辅助牵引工具能够在患者食道温度激励下自主钩取食道组织,为柔性结构,很大程度上保护了病患食道组织。
- 还没有人留言评论。精彩留言会获得点赞!