一种夹持体和夹持变形玩具的制作方法
[0001]
本实用新型涉及玩具车技术领域,尤其涉及一种夹持体和夹持变形玩具。
背景技术:
[0002]
变形玩具,其能够从一个形态通过转动或拆装的方式变形成另一个形态,一般是在汽车、机器人和动物之间转变。为提高变形玩具的趣味性和可玩性,部分变形玩具增加了夹持功能,即通过夹持夹持体等物体,触发变形玩具从一种形态变形为另一种形态,其增加了变形玩具的趣味性。
[0003]
目前的夹持变形玩具,夹持体的作用仅仅是触发变形体变形,变形后夹持体则被夹持在变形体上,夹持体不会随着变形体的变形一起变换形态,影响变形体变形后的整体造型。因此,需要提供一种夹持体和变形体同步变形的夹持变形玩具,改善变形玩具的造型,提高其趣味性。
技术实现要素:
[0004]
本实用新型的目的在于克服现有技术的不足,提供一种可变形的夹持体及夹持体和变形体同步变形的夹持变形玩具
[0005]
本实用新型的技术方案提供一种夹持体,包括锁止件和至少一个弹性展开件;
[0006]
在第一状态时,所述锁止件将所述弹性展开件锁止于缩回状态,触发所述锁止件可解锁所述弹性展开件展开至第二状态。
[0007]
进一步的,所述夹持体还包括用于安装所述锁止件和所述弹性展开件的壳体;
[0008]
所述锁止件可伸缩地安装在所述壳体中,所述锁止件缩回时锁止所述弹性展开件,所述锁止件伸出时解锁所述弹性展开件。
[0009]
进一步的,所述锁止件上还设置有可被吸附从而带动所述锁止件伸出的第一吸附件。
[0010]
进一步的,所述锁止件在伸缩方向上设置有至少一个锁止卡块,所述弹性展开件上对应设置有锁止卡槽;
[0011]
所述锁止件缩回时,所述锁止卡块插入所述锁止卡槽中锁止所述弹性展开件,所述锁止件伸出时,所述锁止卡块伸出所述锁止卡槽解锁所述弹性展开件。
[0012]
进一步的,所述夹持体包括第一弹性展开件、第二弹性展开件和第三弹性展开件,三者均可转动地安装在所述壳体上;
[0013]
所述第一弹性展开件、所述第二弹性展开件对称设置在所述壳体的两侧,在第一状态时,所述第一弹性展开件和所述第二弹性展开件紧贴在所述壳体的两侧,所述锁止件被触发时,所述第一弹性展开件和所述第二弹性展开件分别向所述壳体的两侧转动;
[0014]
在第一状态时,所述第三弹性展开件紧贴在所述壳体的外表面,所述锁止件被触发时,所述第三弹性展开件翻转180
°
,伸出所述壳体外。
[0015]
进一步的,所述第一弹性展开件内设置有第一锁止卡槽,所述第二弹性展开件内
设置有第二锁止卡槽,所述第三弹性展开件上设置有第三锁止卡槽;
[0016]
所述锁止件上对应设置有第一锁止卡块、第二锁止卡块和第三锁止卡块;
[0017]
所述第一锁止卡块和所述第二锁止卡块位于所述锁止件的一端,在第一状态时分别插入所述第一锁止卡槽和所述第二锁止卡槽;
[0018]
所述锁止件上开设有通孔,所述第三锁止卡块设置在所述通孔内,在第一状态时,所述第三锁止卡块插入所述第三锁止卡槽中。
[0019]
本实用新型还提供一种夹持变形玩具,包括变形体和如前所述的夹持体;
[0020]
所述变形体上设置有用于吸附并夹持所述夹持体的夹持部,
[0021]
当所述夹持部吸附所述夹持体时,所述变形体夹持所述夹持体并变形,同时所述夹持部触发所述夹持体变形为第二状态。
[0022]
进一步的,所述夹持部上设置有用于吸附并触发所述锁止件的第二吸附件。
[0023]
进一步的,所述变形体还包括支撑本体、翻转机构和至少两个展开臂,所述翻转机构和所述展开臂可转动地安装在所述支撑本体上;
[0024]
所述夹持部吸附所述夹持体时,触发所述翻转机构,所述翻转机构向远离所述支撑本体的方向转动并带动所述变形体翻转,同时解锁所述展开臂向远离所述支撑本体的方向转动。
[0025]
进一步的,所述夹持部设置于所述支撑本体的前端,所述夹持部包括可伸缩的触发件,并且所述触发件上设置有限位块;
[0026]
所述翻转机构包括转动轴和至少两个翻转臂,所述翻转臂的一端与所述转动轴连接;所述触发件伸出时,所述限位块将所述翻转臂的另一端锁止在所述支撑本体的一侧,所述触发件缩回时,带动所述限位块解锁所述翻转臂,所述翻转臂以所述转动轴为轴向远离所述支撑本体的方向转动。
[0027]
进一步的,所述支撑本体上还可转动地连接有翻转盔,所述翻转盔和所述触发件上分别设置有第一锁止钩和第二锁止钩;
[0028]
所述触发件伸出时,所述第一锁止钩与所述第二锁止钩配合锁止所述翻转盔,所述触发件缩回时,所述第一锁止钩与所述第二锁止钩脱离解锁所述翻转盔,所述翻转盔翻转。
[0029]
进一步的,所述变形体包括第一展开臂,所述第一展开臂包括连接部和转动部,所述连接部通过第五扭转件与所述支撑本体连接,并且所述连接部还设置有锁止凸块,所述转动部设置有所述夹持部;
[0030]
所述支撑本体上还设置有可伸缩的锁止滑杆,所述锁止滑杆伸出时遮挡在所述锁止凸块的转动方向上锁止所述转动部,所述锁止滑杆缩回时所述转动部解锁,所述第一展开臂带动所述夹持体同步转动。
[0031]
进一步的,所述变形体还包括用于解锁所述第一展开臂的解锁部,所述解锁部包括触地推块、旋转件和所述锁止滑杆;
[0032]
所述触地推块的一端伸出所述支撑本体外,所述旋转件的中部通过销轴安装在所述支撑本体上,所述旋转件的一端与所述触地推块接触,另一端与所述锁止滑杆接触;
[0033]
所述翻转机构带动所述变形体翻转后,所述触地推块与变形体所在的平面接触并被推向所述支撑本体,从而推动所述旋转件转动,所述旋转件靠近所述锁止滑杆的一端压
缩所述锁止滑杆,所述第一展开臂解锁。
[0034]
进一步的,所述变形体包括第二展开臂,所述第二展开臂通过第五扭转件安装在所述支撑本体上,其中一个所述翻转臂将所述第二展开臂锁止在所述支撑本体的一侧,当所述翻转臂转动时,解锁所述第二展开臂向远离所述支撑本体的方向转动。
[0035]
进一步的,所述夹持体为前述本实用新型所提供的夹持体。
[0036]
采用上述技术方案后,具有如下有益效果:
[0037]
本实用新型中的夹持体,具备两种状态,在第一状态时通过触发锁止件,可触发弹性展开件展开变形至第二状态。
[0038]
本实用新型中的夹持变形玩具,由夹持部吸附夹持体触发变形体变形,并且同时触发夹持体展开变形,实现了夹持体和变形体同步变形,趣味性更强,更能吸引小朋友的喜爱。
附图说明
[0039]
参见附图,本实用新型的公开内容将变得更易理解。应当理解:这些附图仅仅用于说明的目的,而并非意在对本实用新型的保护范围构成限制。图中:
[0040]
图1是本实用新型一实施例中夹持变形玩具的第一状态立体图;
[0041]
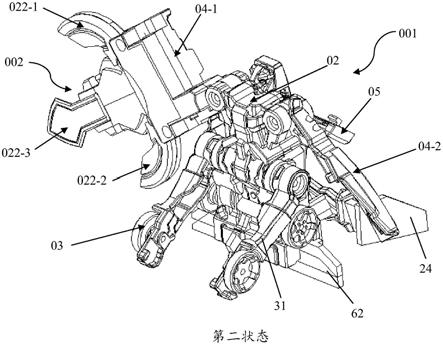
图2是本实用新型一实施例中夹持变形玩具的第二状态立体图;
[0042]
图3是图2的的背面示图;
[0043]
图4是本实用新型一实施例中夹持体的展开状态图;
[0044]
图5是本实用新型一实施例中夹持体的部分分解图;
[0045]
图6是本实用新型一实施例中变形体的部分分解图;
[0046]
图7是本实用新型一实施例中变形体的内部结构图;
[0047]
图8是本实用新型一实施例中变形体的局部示意图。
[0048]
附图标记对照表:
[0049]
变形体001、夹持部01、第二吸附件11、触发件12、限位块121、第二弹性件122、第二锁止钩123、支撑本体02、上壳21、下壳22、装饰件 23、转轴231、第三扭转件232、支撑翼24、翻转机构03、翻转臂31、限位槽311、凸块312、转动轴32、第二扭转件321、展开臂04、第一展开臂 04-1、第二展开臂04-2、连接部41、上臂壳041、下臂壳042、锁止凸块411、转动部42、第四扭转件43、第五扭转件44、翻转盔05、第一锁止钩51、解锁部06、锁止滑杆61、第三弹性件611、下压部612、触地推块62、触地端621、推动端622、旋转件63、销轴631;
[0050]
夹持体002、锁止件021、第一吸附件0211、锁止卡块0212、第一锁止卡块0212-1、第二锁止卡块0212-2、第三锁止卡块0212-3、弹性展开件 022、第一弹性展开件022-1、第二弹性展开件022-2、第三弹性展开件 022-3、锁止卡槽0221、第一锁止卡槽0221-1、第二锁止卡槽0221-2、第三锁止卡槽0221-3、壳体023、第一扭转件024、第一弹性件025。
具体实施方式
[0051]
下面结合附图来进一步说明本实用新型的具体实施方式。
[0052]
容易理解,根据本实用新型的技术方案,在不变更本实用新型实质精神下,本领域的一般技术人员可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及
附图仅是对本实用新型的技术方案的示例性说明,而不应当视为本实用新型的全部或视为对实用新型技术方案的限定或限制。
[0053]
在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。
[0054]
实施例一:
[0055]
本实施例中的夹持体002,如图1-5所示,包括锁止件021和至少一个弹性展开件022;
[0056]
在第一状态时,锁止件021将弹性展开件022锁止于缩回状态,触发锁止件021可解锁弹性展开件022展开至第二状态。
[0057]
在本实施例中,图1所示为第一状态,锁止件021将弹性展开件022 锁止在缩回状态,此时的夹持体002为圆形薄片状。当触发锁止件021 时,解锁弹性展开件022变形至图2-4所示的第二状态。
[0058]
可选地,夹持体002还可以为其他形状,例如:矩形、或椭圆形等。
[0059]
其中,锁止件021可设置为电动机构、机械联锁机构等。
[0060]
进一步的如图4、5所示,夹持体002还包括用于安装锁止件021和弹性展开件022的壳体023;
[0061]
锁止件021可伸缩地安装在壳体023中,锁止件021缩回时锁止弹性展开件022,锁止件021伸出时解锁弹性展开件022。
[0062]
在本实施例中,设置有三个弹性展开件022,分别为第一弹性展开件 022-1、第二弹性展开件022-2和第三弹性展开件022-3,三者均通过第一扭转件024可转动地安装在壳体023上,第一扭转件024可采用扭簧。
[0063]
其中,第一弹性展开件022-1、第二弹性展开件022-2对称设置在壳体023的两侧,如图1所示,在第一状态时,第一弹性展开件022-1和第二弹性展开件022-2紧贴在壳体023的两侧,与壳体023构成一个圆形的薄片,当锁止件021被触发时,第一弹性展开件022-1和第二弹性展开件 022-2分别以与其连接的第一扭转件024为轴转动,第一弹性展开件022-1 和第二弹性展开件022-2分别向壳体023的两侧转动变形为图2-4所示的第二状态。
[0064]
如图1所示,在第一状态时,第三弹性展开件022-3紧贴在壳体023 的外表面,锁止件021被触发时,第三弹性展开件022-3翻转180
°
,伸出壳体023外,变形为图2-4所示的第二状态。
[0065]
参见图1,夹持体002在第一状态时为圆形薄片,再参见图2-4,夹持体002变形为第二状态时整体为武器形状,第一弹性展开件022-1和第二弹性展开件022-2展开在两侧作为剑翼,第三弹性展开件022-3伸出作为剑头。
[0066]
可选的,弹性展开件022可设置一个、两个或三个以上,并且,弹性展开件022还可通过弹性件与壳体023连接。
[0067]
进一步的,如图5所示,锁止件021上还设置有可被吸附从而带动所述锁止件021伸出的第一吸附件0211。
[0068]
具体的,第一吸附件0211设置为磁体,当受到外部的磁力吸引时,第一吸附件0211
带动锁止件021伸出。
[0069]
可选的,可不在锁止件021上设置第一吸附件0211,直接采用铁片或磁体片制作锁止件021。
[0070]
更进一步的,如图5所示,锁止件021在伸缩方向上设置有三个锁止卡块0212,弹性展开件022上对应设置有锁止卡槽0221;
[0071]
锁止件021缩回时,锁止卡块0212插入锁止卡槽0221中锁止弹性展开件022,锁止件021伸出时,锁止卡块0212伸出锁止卡槽0221解锁弹性展开件022。
[0072]
具体的,锁止件021通过第一弹性件025与壳体023连接,实现锁止件021的伸缩。
[0073]
第一弹性展开件022-1内设置有第一锁止卡槽0221-1,第二弹性展开件022-2内设置有第二锁止卡槽0221-2,第三弹性展开件022-3上设置有第三锁止卡槽0221-3;
[0074]
锁止件021上对应设置有第一锁止卡块0212-1、第二锁止卡块0212-2 和第三锁止卡块0212-3。
[0075]
第一锁止卡块0212-1和第二锁止卡块0212-2位于锁止件021的一端,在第一状态时分别插入第一锁止卡槽0221-1和第二锁止卡槽0221-2。
[0076]
其中,第一弹性展开件022-1由上件和下件盖合构成,第一锁止卡槽 0221-1设置在上件和下件之间,锁止时,第一锁止卡块0212-1位于上件和下件之间,在图5中上件被分解在壳体023两侧,下件仍安装在壳体 023上。第二弹性展开件022-2的结构与第一弹性展开件022-1的结构相同。
[0077]
第三弹性展开件022-3在第一状态时朝向锁止件021的一侧设置有凸起部,凸起部与第三弹性展开件022-3之间形成第三锁止卡槽0221-3,锁止件021上对应开设有通孔,第三锁止卡块0212-3设置在通孔内,在第一状态时,第三锁止卡块0212-3插入第三锁止卡槽0221-3中。
[0078]
可选的,弹性展开件022和锁止件021上的锁止卡槽0221和锁止卡块0212可交换设置,弹性展开件022和锁止件021之间还可通过其他机械锁止机构锁止。
[0079]
本实施例中,夹持体002在第一状态时,其整体为圆形,当第一吸附件0211被吸附时,带动锁止件021整体向所述壳体023外的方向伸出,锁止件021上的第一锁止卡块0212-1、第二锁止卡块0212-2和第三锁止卡块0212-3分别脱离第一锁止卡槽0221-1、第二锁止卡槽0221-2和第三锁止卡槽0221-3,从而解锁第一弹性展开件022-1、第二弹性展开件022-2 和第三弹性展开件022-3展开,进入第二状态,此时夹持体002为武器形状。
[0080]
实施例二:
[0081]
夹持变形玩具,如图1所示,包括前述的实施例一的夹持体002和变形体001,变形体001上设置有用于吸附并夹持夹持体002的夹持部 01;
[0082]
当夹持部01吸附夹持体002时,变形体001夹持夹持体002并变形,同时夹持部01触发夹持体002变形至第二状态。
[0083]
具体的,图1所示,夹持变形玩具在第一状态时,变形体001的外形为汽车,夹持部01设置在变形体001的车头位置,夹持体002为圆形薄片状,此时变形体001和夹持体002二者是分离的状态。当夹持体002 进入夹持部01被夹持部01吸附时,夹持体002和变形体001均变形,夹持变形玩具变形为图2、3所示的第二状态,此时变形体001翻转变形为机器人形状,夹持体002被变形体001夹持同时变形为机器人手持的武器,变形体001和夹持体002为
一体状态。
[0084]
可选的,夹持体002可设置两个或两个以上,变形体001可变形为动物等其他形状,夹持体002也可设置为方形或其他不规则形状,其也可变形为武器之外的其他的形状。
[0085]
进一步的,如图7所示,夹持部01上设置有用于吸附并触发锁止件 021的第二吸附件11。
[0086]
具体的,夹持部01设置为槽口状,第二吸附件11设置在槽口内,在本实施例中,第二吸附件11为磁体,用于吸附锁止件021上的第一吸附件0211,利用磁体异极相吸的原理,当夹持体002上第一吸附件0211 与夹持部01中的第二吸附件11之间的距离足够近时,在磁力的作用下,第一吸附件0211被第二吸附件11吸附,带动锁止件021向朝向壳体023 外的方向伸出,使锁止件021解锁弹性展开件022,同时,也将夹持体 002整体吸附在夹持部01中。
[0087]
进一步的,如图1-3所示,变形体001还包括支撑本体02、翻转机构03和两个展开臂04,分别为第一展开臂04-1和第二展开臂04-2,翻转机构03和展开臂04可转动地安装在支撑本体02上;
[0088]
夹持部01吸附夹持体002时,触发翻转机构03,翻转机构03向远离支撑本体02的方向转动并带动变形体001翻转,同时解锁展开臂04 向远离支撑本体02的方向转动。
[0089]
在本实施例中,如图1所示,在第一状态时,翻转机构03作为车轮结构连接在支撑本体02的底面两侧,其中第一展开臂04-1作为车头连接在支撑本体02的前端,另第二展开臂04-2作为车身的一部分,连接在支撑本体02的顶面一侧,支撑本体02的顶面后端还设置有支撑翼24。
[0090]
当夹持部01吸附并夹持夹持体002时,翻转机构03向车底一侧弹出,推动变形体001整体向上翻转,由翻转机构03和支撑翼24共同支撑在变形体001所在的平面上,同时第一展开臂04-1和第二展开臂04-2 向支撑本体02的两侧展开,第一展开臂04-1还夹持夹持体002同步转动至支撑本体02的一侧,夹持体002在这个过程中也同步展开。经过上述变形过程,夹持变形玩具变形至图2、3所示的第二状态。
[0091]
可选的,还可设置两个以上的展开臂04。
[0092]
进一步的,如图7所示底部视角的变形体001的内部结构图,在第一状态时,夹持部01设置于支撑本体02的前端,夹持部01还包括可伸缩的触发件12,并且触发件12上设置有限位块121;
[0093]
翻转机构03包括转动轴32和至少两个翻转臂31,翻转臂31的一端与转动轴32连接;触发件12伸出时,限位块121将翻转臂31的另一端锁止在支撑本体02的一侧,触发件12缩回时,带动限位块121解锁翻转臂31,翻转臂31以转动轴32为轴向远离支撑本体02的方向转动。
[0094]
具体的,触发件12连接第二弹性件122实现其伸缩,触发件12安装在夹持部01的槽口前端,第二吸附件11位于夹持部01的中部。对应两个翻转臂31,触发件12设置有两个限位块121,两个限位块121设置在触发件12的两端,朝向车身的两侧。
[0095]
两个翻转臂31对称设置在车身的两侧,转动轴32通过第二扭转件 321安装在支撑本体02上,两个翻转臂31的一端与转动轴32连接,另一端位于限位块121的外侧,并且,翻转臂31上设置有与限位块121配合的限位槽311。
[0096]
在第一状态时,第二弹性件122处于自然状态,两个限位槽311与两个限位块121配
合,两个翻转臂31被锁止在车身的两侧。当夹持体002 被第二吸附件11吸附时,触发件12先于第二吸附件11与夹持体002接触,在第二吸附件11的磁力作用下,夹持体002压缩触发件12后与第二吸附件11连接。此时,触发件12向支撑本体02内缩进,两个限位块 121与两个限位槽311脱离,两个翻转臂31在第二扭转件321的扭转力作用下以转动轴32为轴转动,即向远离车底的一侧转动。
[0097]
进一步的,如图1、6所示,支撑本体02上还可转动地连接有翻转盔05,翻转盔05和触发件12上对应设置有第一锁止钩51和第二锁止钩 123;
[0098]
触发件12伸出时,第一锁止钩51和第二锁止钩123配合锁止翻转盔05,触发件12缩回时,第一锁止钩51与第二锁止钩123脱离解锁翻转盔05,翻转盔05翻转。
[0099]
具体的,如6所示,支撑本体02包括上壳21、下壳22和装饰件23,上壳21和下壳22相嵌合,在第一状态时分别作为车顶和车底,装饰件 23安装在上壳21上,在第二状态时作为机器人的背部和头部。装饰件 23上设置有转轴231,转轴231通过第三扭转件232安装在装饰件23上,翻转盔05的一端连接在转轴231上。
[0100]
如图1所示,在第一状态时,触发件12处于伸出状态,第一锁止钩 51和第二锁止钩123相配合,将翻转盔05锁止,构成车顶的一部分。当触发件12被压缩时,第二锁止钩123脱离第一锁止钩51,翻转盔05解锁,在第三扭转件232的扭转力作用下翻转至第二状态,参见图2、3,翻转盔05翻转后成为机器人的盔甲。
[0101]
在本实施例中,如图6、8所示,其中第一展开臂04-1包括连接部 41和转动部42,连接部41通过第四扭转件43与支撑本体02连接,并且连接部41还设置有锁止凸块411,转动部42设置有夹持部01;
[0102]
支撑本体02上还设置有可伸缩的锁止滑杆61,锁止滑杆61伸出时遮挡在锁止凸块411的转动方向上锁止转动部42,锁止滑杆61缩回时转动部42解锁,第一展开臂04-1带动夹持体002同步转动。
[0103]
具体的,如图6所示,第一展开臂04-1包括上臂壳041和下臂壳042,其中连接部41设置在上臂壳041上,下臂壳042与上臂壳041相盖合,形成转动部42,夹持部01则设置在上臂壳041和下臂壳042之间。
[0104]
如图8所示,锁止凸块411凸出连接部41外,在第四扭转件43的扭转力作用下,其具备顺时针旋转的趋势。锁止滑杆61的一端通过第三弹性件611安装在支撑本体02上实现其伸缩,在第一状态时,第三弹性件611处于自然状态,锁止滑杆61的另一端遮挡在锁止凸块411转动方向的一侧,图8所示为左侧,以限制锁止凸块411的转动,将第一展开臂04-1锁止在第一状态。当第三弹性件611被压缩时,锁止滑杆61向远离连接部41的方向移动,不再限制锁止凸块411的转动,从而解锁第一展开臂04-1转动展开。
[0105]
可选的,夹持部01也可设置在翻转机构03或支撑本体02上,其展开后可作为机器人的头部或盔甲等其他结构。
[0106]
进一步的,如图8所示,变形体001还包括用于解锁第一展开臂04-1 的解锁部06,解锁部06包括触地推块62、旋转件63和锁止滑杆61;
[0107]
触地推块62的一端伸出支撑本体02外,旋转件63的中部通过销轴 631安装在支撑本体02上,旋转件63的一端与触地推块62接触,另一端与锁止滑杆61接触;
[0108]
翻转机构03带动变形体001翻转后,触地推块62与变形体001所在的平面接触并被
推进支撑本体02,从而推动旋转件63转动,旋转件 63靠近锁止滑杆61的一端压缩锁止滑杆61,第一展开臂04-1解锁。
[0109]
具体的,触地推块62包括触地端621和推动端622,触地端621为沿车身宽度方向设置长条状结构,推动端622垂直于触地端621,朝向支撑本体02内部设置,触地端621的端部位于旋转件63的一端的一侧。锁止滑杆61连接有第三弹性件611的一端设置有下压部612,下压部612 位于旋转件63的另一端的一侧,并且,触地端621和下压部612位于旋转件63的同侧。
[0110]
在翻转机构03带动变形体001翻转后,触地推块62的触地端621 与变形体001所在的平面接触,在转动里和重力的作用下,触地推块62 被推进支撑本体02,推动端622推动旋转件63的一端,使得旋转件63 的另一端压缩锁止滑杆61的下压部612,第一展开臂04-1解锁。
[0111]
在本实施例中,如图8所示,第二展开臂04-2通过第五扭转件44 安装在支撑本体02上,其中一个翻转臂31将第二展开臂04-2锁止在支撑本体02的一侧,如图6所示,位于第二展开臂04-2一侧的翻转臂31 上设置有凸起的凸块312,在第一状态时,凸块312与第二展开臂04-2 紧密贴合,从而限制第二展开臂04-2的展开;当该翻转臂31转动时,凸块312脱离第二展开臂04-2,第二展开臂04-2解锁向远离支撑本体02 的方向转动。
[0112]
可选的,第二展开臂04-2也可由触发件12或第一展开臂04-1锁止。
[0113]
下面,结合上述结构对本实施例的夹持变形玩具的变形过程进行说明:
[0114]
在图1所示的第一状态时,夹持体002为圆形薄片,变形体001为汽车形状,当夹持体002靠近夹持部01时,夹持体002中的第一吸附件0211被夹持部01中的第二吸附件11吸附,夹持体002中的锁止件021 解锁夹持体002中的三个弹性展开件022,夹持体002变形为武器形状。
[0115]
在夹持体002与夹持部01连接的同时,夹持体002推动夹持部01 中的触发件12,触发件12向支撑本体02内缩进,同时解锁翻转盔05 和两个翻转臂31,翻转盔05翻转为机器人的盔甲,两个翻转臂31带动变形体001整体翻转,并以两个翻转臂31和支撑翼24为支撑站立在平面上;上述过程中,当翻转臂31翻转时,解锁第二展开臂04-2向远离支撑本体02的方向展开;当变形体001站立在平面上时,触地推块62被向支撑本体02内推进,触地推块62推动旋转件63压缩锁止滑杆61,锁止滑杆61解锁第一展开臂04-1,第一展开臂04-1带动夹持在夹持部01 中的变形为武器的夹持体002展开,于是,夹持变形玩具变形为图2、3 所示的第二状态。
[0116]
以上所述的仅是本实用新型的原理和较佳的实施例。应当指出,对于本领域的普通技术人员来说,在本实用新型原理的基础上,还可以做出若干其它变型,也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1