手足协同运动机及其控制方法与流程
1.本发明与运动器材有关;特别是指一种具有辅助上下肢运动的手足协同运动机及其控制方法。
背景技术:
2.已知为了提升使用者之上下肢肌力,通常会使用手足运动机以辅助使用者活动上下肢或是进行上下肢之术后复健,现有之手足运动机通常包括有机架、椅座、把手、脚踏板等。使用时是以手部握住把手或脚部踩踏脚踏板后,借着使用者之上肢或下肢施力于把手或脚踏板而进行周期性的绕转运动,以伸展及活动上下肢,进而达成上肢或下肢肌耐力的锻炼或是复健。
3.然而,肌耐力的锻炼或是复健治疗需往往需要长时间持续不断地进行,其过程不免艰辛乏味,且,当使用者之上肢或是下肢力量不足,以致无法靠自己的力量顺利地转动把手或是踏板时,使用者容易在肌耐力的锻炼或是复健治疗过程中产生挫折感或是感觉到不舒服,进而降低使用者操作器材的意愿,而导致有中途放弃训练的情形发生,或者,上肢与下肢的其中一者较强健,而以较快速度转动,另一者较弱而以较慢速度转动,导致上肢与下肢不协调。
4.故,现有的手足运动机存有待改善之处。
技术实现要素:
5.有鉴于此,本发明之目的在于提供一种手足协同运动机与与控制方法,能辅助使用者之弱肢以顺利地进行肌耐力的锻炼或是复健。
6.缘以达成上述目的,本发明提供的一种手足协同运动机包括有一机架、一上肢运动机构、一第一驱动模块、一下肢运动机构、一第二驱动模块、一第一转速传感器、一第二转速传感器以及一控制模块。
7.所述上肢运动机构包含一第一转动件与一第一操控件,所述第一转动件枢设于所述机架,所述第一操控件连接于所述第一转动件,且所述第一操控件受外力作用而带动所述第一转动件转动;所述第一驱动模块耦接所述第一转动件且受控制而带动所述第一转动件转动;所述下肢运动机构包含一第二转动件与一第二操控件,所述第二转动件枢设于所述机架,且所述第二转动件的位置低于所述第一转动件;所述第二操控件连接于所述第二转动件,且所述第二操控件受外力作用而带动所述第二转动件转动;所述第二驱动模块耦接所述第二转动件,且受控制而带动所述第二转动件转动;所述第一转速传感器耦接所述上肢运动机构,用以侦测所述第一转动件的转速;所述第二转速传感器,耦接所述下肢运动机构,用以侦测所述第二转动件的转速;所述控制模块电性连接所述第一驱动模块、所述第二驱动模块、所述第一转速传感器与所述第二转速传感器,所述控制模块由第一转速传感器所侦测转速得到一第一转速及由所述第二转速传感器所侦测转速得到一第二转速,并依据所述第一转速与所述第二转速控制所述第一驱动模块与所述第二驱动模块中的至少一
个,使所述第一转速与所述第二转速的一差值小于或等于一预定差值。
8.本发明另提供一种手足协同运动机的控制方法,所述手足协同运动机包含一上肢运动机构、一第一驱动模块、一下肢运动机构、一第二驱动模块、一第一转速传感器、一第二转速传感器与一控制模块,其中,所述上肢运动机构包含一第一转动件与一第一操控件,所述第一操控件连接于所述第一转动件,且所述第一操控件受外力作用而带动所述第一转动件转动;所述下肢运动机构包含一第二转动件与一第二操控件,所述第二操控件连接于所述第二转动件,且所述第二操控件受外力作用而带动所述第二转动件转动;所述第一转速传感器用以侦测所述第一转动件的转速,所述第二转速传感器用以侦测所述第二转动件的转速;所述控制方法系由所述控制模块所执行,包含下列步骤:
9.通过所述第一转速传感器与所述第二转动件分别侦测所述第一转动件与所述第二转动件的转速,以分别得到一第一转速与一第二转速;依据所述第一转速与所述第二转速控制所述第一驱动模块与所述第二驱动模块中的至少一个,使所侦测的所述第一转速与所述第二转速的一差值小于或等于一预定差值。
10.本发明之效果在于,所述控制模块依据所述第一转速与所述第二转速控制所述第一驱动模块与所述第二驱动模块中的至少一个,使所侦测的所述第一转速与所述第二转速的一差值小于或等于一预定差值,也就是说,所述手足协同运动机具有控制所述第一操控件或所述第二操控件转动,以降低所述第一操控件与所述第二操控件间的转速差异之功效。
附图说明
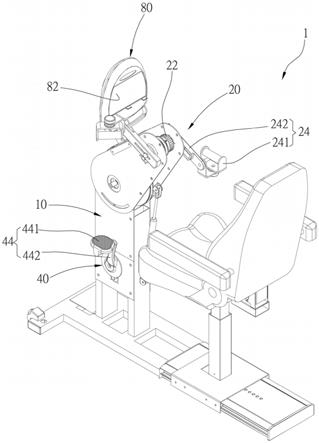
11.图1为本发明第一优选实施例之手足协同运动机的立体图。
12.图2为上述优选实施例之手足协同运动机的侧视图。
13.图3为图2的部分构件示意图。
14.图4为上述优选实施例之手足协同运动机的方块图。
15.图5为上述优选实施例之手足协同运动机的控制方法的流程图。
16.图6为本发明第二优选实施例之手足协同运动机的方块图。
具体实施方式
17.为能更清楚地说明本发明,兹举数优选实施例并配合附图详细说明如后。请参图1至图4所示,为本发明第一优选实施例之手足协同运动机1,包含一机架10、一上肢运动机构20、一第一驱动模块30、一下肢运动机构40、一第二驱动模块50、一第一转速传感器60、一第二转速传感器70及一控制面板80。
18.所述上肢运动机构20包含一第一转动件22与一第一操控件24,所述第一转动件22枢设于所述机架10,所述第一操控件24连接于所述第一转动件22,且所述第一操控件24受外力作用而带动所述第一转动件22转动。所述第一驱动模块30耦接所述第一转动件22且受控制而带动所述第一转动件22转动。在本实施例中,所述第一转动件22包含两个第一皮带轮221及一第一皮带222,所述第一操控件24包含两个握把241及两个第一曲柄242,所述第一驱动模块30包含一第一马达32,所述第一皮带222绕过所述两个第一皮带轮221,且所述两个第一皮带轮221中的一个与所述第一马达32连接,另一个之左右两侧分别连接有一个
第一曲柄242,且各所述第一曲柄242上连接有一个握把241供使用者抓握,借此,使用者能抓握各所述握把241并施予外力,以带动所述两个第一皮带轮221及所述第一皮带222转动。此外,所述第一马达32也能辅助带动所述多个第一皮带轮221及所述第一皮带222转动,以使各所述第一曲柄242及各所述握把241转动,进而使得抓握住各所述握把241的使用者的上肢随着各所述第一曲柄242及各所述握把241之转动而进行周期性的绕转运动。
19.所述下肢运动机构40包含一第二转动件42与一第二操控件44,所述第二转动件42枢设于所述机架10,所述第二操控件44连接于所述第二转动件42,且所述第二操控件44受外力作用而带动所述第二转动件42转动,所述第二驱动模块50耦接所述第二转动件42且受控制而带动所述第二转动件42转动,于本实施例中,所述第二转动件42包含两个第二皮带轮421及一第二皮带422,所述第二操控件44包含两个踏板441及两个第二曲柄442。所述第二驱动模块50包含一第二马达52,所述第二皮带422绕过所述两个第二皮带轮421,且所述两个第二皮带轮421其中的一个与所述第二马达52连接,另一个的左右两侧则分别连接有一个第二曲柄442,且各所述第二曲柄442上连接有一个踏板441供使用者踩踏,借此,使用者能踩踏各所述踏板441并施予外力,以带动所述两个第二皮带轮421及所述第二皮带422转动。而所述第二马达52也能辅助带动所述两个第二皮带轮421及所述第二皮带422转动,以使各所述第二曲柄442及各所述握把241转动,进而使得踩踏在各所述踏板441上的使用者的下肢随着各所述第二曲柄442及各所述踏板441之转动而进行周期性的绕转运动。
20.值得一提的是,所述第一操控件24能受外力作用而带动所述第一转动件22正向或反向转动,所述第二操控件44能受外力作用而带动所述第二转动件42正向或反向转动,也就是说,所述第一操控件24与所述第二操控件44皆可依据使用者施予的力的方向,而分别带动所述第一转动件22与所述第二转动件42进行正向或是反向的转动。
21.所述第一转速传感器60耦接所述上肢运动机构20,用以侦测所述第一转动件22的转速。所述第二转速传感器70耦接所述下肢运动机构40,用以侦测所述第二转动件42的转速。所述第一转速传感器60及所述第二转速传感器70可以是电磁转速传感器、光电转速传感器或是其他具有感测转速之传感器。在本实施例中,所述第一转速传感器60及所述第二转速传感器70是以电磁转速传感器为例说明,但不以此为限,亦可是霍尔感测品、光电开关、近接开关。所述第一转速传感器60设置于接近所述第一转动件22的位置,所述第二转速传感器70设置于接近所述第二转动件42的位置,以分别感测所述第一转动件22与所述第二转动件42的转速。优选地,所述第一转速传感器60能侦测所述第一转动件22的转动方向,所述第二转速传感器70能侦测所述第二转动件42的转动方向。
22.所述控制面板80设置于所述机架10上,所述控制面板80包含有一显示模块82、一控制模块84及一启动开关86,所述控制模块84电性连接所述第一驱动模块30、所述第二驱动模块50、所述第一转速传感器60、所述第二转速传感器70、所述显示模块82及所述启动开关86。在本实施例中,所述显示模块82为一显示器设置于所述机架10上,所述显示器能显示所述第一转速及所述第二转速以供使用者清楚了解目前的转速。所述启动开关86可以实体按钮,以供使用者操作,使用者可通过按压启动所述启动开关86或是关闭所述启动开关86。当使用者启动所述启动开关86时,所述控制模块84依据所述第一转速与所述第二转速控制所述第一驱动模块30与所述第二驱动模块50中的至少一个;当使用者关闭所述启动开关86时,所述控制模块84停止控制所述第一驱动模块30与所述第二驱动模块50。实务上,所述显
示模块82可为一触控显示器,所述启动开关86亦可以是显示于所述触控显示器上的虚拟按键供使用者点击,且经由所述显示模块82电性连接至控制模块84,并不以上述之实体按钮为限。
23.请配合图5,为本发明所提供之手足协同运动机1的控制方法,系由上述之控制模块84执行,所述手足协同运动机1的控制方法包含有下列步骤:
24.s201使用者启动或是关闭所述启动开关86,所述启动开关86启动时,所述控制模块84依据所述第一转速与所述第二转速控制所述第一驱动模块30与所述第二驱动模块50中的至少一个。所述启动开关86关闭时,所述控制模块84停止控制所述第一驱动模块30与所述第二驱动模块50,也就是说,当使用者需要所述手足协同运动机1提供辅助功能时,使用者需启动所述启动开关86,使所述控制模块84控制所述第一马达32与所述第二马达52中的至少一个,以辅助使用者的上肢与下肢中的至少一者进行周期性的绕转运动,当使用者不需要所述手足协同运动机1提供辅助功能时,使用者需关闭所述启动开关86,使所述控制模块84停止控制所述第一马达32与所述第二马达52,此时使用者完全靠自己的施力操控所述第一操控件24与所述第二操控件44,并依照使用者施力的程度控制所述第一转动件22及所述第二转动件42之转速。
25.s202所述控制模块84自所述第一转速传感器60所侦测转速得到第一转速及自所述第二转速传感器70所侦测转速得到第二转速;优选地,步骤s202还包含通过所述显示模块82显示所述第一转速及所述第二转速,优选地,步骤s202还包含所述第一转速传感器60侦测所述第一转动件22的转动方向,所述第二转速传感器70侦测所述第二转动件42的转动方向,其中所述第一转速传感器60侦测所述第一转动件22的转动方向为一第一方向,所述第一方向为正向或反向,所述第二转速传感器70侦测所述第二转动件42的转动方向为一第二方向,所述第二方向为正向或反向,以及通过所述显示模块82显示所述第一方向及所述第二方向,举例来说,当使用者使用上肢驱动所述第一转动件往正向转动且每分钟转动二十圈,以及使用下肢驱动所述第二转动件往反向转动且每分钟转动十五圈时,所述显示模块82显示所述第一转速为20rpm、所述第一方向定义为正向及所述第二转速为15rpm、所述第二方向定义为反向,所述正向或反向也可以使用箭头指示方向或是以+/-等符号于所述显示模块82上显示,借此,使用者能清楚了解目前所述第一转动件22与所述第二转动件42的转速及方向,以利自行调整施力的程度。
26.s203所述控制模块84依据所述第一转速与所述第二转速控制所述第一驱动模块30与所述第二驱动模块50中的至少一个,使所侦测的所述第一转速与所述第二转速的一差值δv小于或等于一预定差值δva。优选地,所述控制模块84依据所述第一转速传感器60侦测之所述第一方向及所述第二转速传感器70侦测之所述第二方向,控制所述第一驱动模块30之所述第一马达32带动所述第一转动件22沿所述第一方向同向增加转速,或者控制所述第二驱动模块50之所述第二马达52带动所述第二转动件42沿所述第二方向同向增加转速,举例来说,所述预定差值δva为5rpm,而使用者驱动所述第一转动件22之所述第一转速为20rpm且第一方向为正向以及所述第二转动件42之所述第二转速为10rpm且第二方向为反向时,所述第一转速与所述第二转速之所述差值δv为10rpm,此时,所述控制模块84控制所述第二驱动模块50,带动所述第二转动件42反向增加转速,以提升所述第二转速,使所述第一转速与所述第二转速之所述差值δv小于或等于所述预定差值δva,借此,可辅助提升使
用者比较没力的下肢进行周期性的绕转运动以接近上肢之绕转速度。在一实施例中,所述控制模块84依据所述第一转速与所述第二转速控制所述第一驱动模块30与所述第二驱动模块50中的至少一个,使所述差值δv为零,也就是所述控制模块84控制所述第一驱动模块30与所述第二驱动模块50中的至少一个,以带动所述第一转动件22或所述第二转动件42增加转速,提升所述第一转速或所述第二转速,使所述第一转速与所述第二转速之转速相等,借此提升使用者比较没力的上肢或下肢进行周期性的绕转运动,以匹配比较有力的上肢或下肢之绕转速度。
27.优选地,步骤s203中还包含,所述控制模块84系在所述第一转速与所述第二转速的所述差值δv大于一第一预定差值时,所述控制模块84控制所述第一驱动模块30与所述第二驱动模块50中的至少一个,使所述差值δv小于或等于所述预定差值δva,其中,所述控制模块84在所述第一转速小于所述第二转速时,所述控制模块84系控制所述第一驱动模块30,带动所述第一转动件22增加转速,以提升所述第一转速;所述控制模块84在所述第二转速小于所述第一转速时,系控制所述第二驱动模块50,带动所述第二转动件42增加转速,以提升所述第二转速,例如,所述第一预定差值为10rpm,使用者驱动所述第一转动件22使所述第一转速为20rpm及驱动所述第二转动件42使所述第二转速为5rpm,此时因所述差值δv为15rpm大于所述第一预定差值10rpm,且所述第二转速小于所述第一转速,故,所述控制模块84控制所述第二驱动模块50以提升所述第二转速,使所述第一转速与所述第二转速之所述差值δv小于或等于所述预定差值δva之5rpm。
28.s204经一预定时间后,所述控制模块判断所述第一转速与所述第二转速之所述差值δv与所述预定差值δva之差异。
29.s205当所述第一转速与所述第二转速之所述差值δv小于或等于所述预定差值δva,所述控制模块84停止控制所述第一驱动模块30或所述第二驱动模块50,并在步骤s205后执行步骤s204;当所述第一转速与所述第二转速之所述差值δv大于所述预定差值δva,则执行步骤s203。举例来说,所述预定差值δva为5rpm,而使用者驱动所述第一转动件22使所述第一转速为20rpm以及驱动所述第二转动件42使所述第二转速为10rpm时,所述第一转速与所述第二转速之所述差值为10rpm,此时,所述控制模块84控制所述第二驱动模块50,带动所述第二转动件42增加转速,以提升所述第二转速,使所述第一转速与所述第二转速之所述差值δv(10rpm)小于或等于所述预定差值δva(5rpm),而后经所述预定时间(例如五分钟)后,所述控制模块84依据所述差值δv与所述预定差值δva之差异判断执行步骤s204或是执行步骤s203,当所述第一转速与所述第二转速之所述差值δv小于或等于所述预定差值δva时,表示使用者之上肢与下肢之绕转速度已接近互相匹配,执行步骤s205所述控制模块84停止控制所述第二驱动模块50,此时,所述下肢运动机构40回到使用者靠自己的施力操控所述第二操控件44,并依照使用者施力的程度控制所述第二转动件42之转速的模式。而当所述第一转速与所述第二转速之所述差值δv大于所述预定差值δva(5rpm)时,例如使用者之上肢之绕转速度减慢以致所述第一转速降至10rpm时,所述第一转速与所述第二转速之所述差值δv大于所述预定差值δva之5rpm,所述控制模块84控制所述第一驱动模块30以提升所述第一转速,使所述第一转速与所述第二转速之所述差值δv小于或等于所述预定差值δva之5rpm,以辅助提升使用者之上肢进行周期性的绕转运动,并使上肢之绕转速度接近下肢之绕转速度。
30.图6所示为本发明第二优选实施例之手足协同运动机之方块图,其具有与第一优选实施例之手足协同运动机1大致相同之结构,不同的是,所述控制面板80包含一第一启动开关861及一第二启动开关862,所述第一启动开关861与所述第二启动开关862电性连接所述控制模块84。
31.本实施例的手足协同运动机同样可应用第一实施例的控制方法,差别在于,所述控制模块84系依所述第一启动开关861及所述第二启动开关862的启闭与否控制所述第一驱动模块30或所述第二驱动模块50。更详而言,当使用者启动所述第一启动开关861时,所述控制模块84依据所述第一转速与所述第二转速控制所述第一驱动模块30,当使用者启动所述第二启动开关862时,所述控制模块84依据所述第一转速与所述第二转速控制所述第二驱动模块50。当使用者关闭所述第一启动开关861时,所述控制模块84停止控制所述第一驱动模块30,当使用者关闭所述第二启动开关862时,所述控制模块84停止控制所述第二驱动模块50。所述第一启动开关861与所述第二启动开关862可以是实体按钮,以供使用者操作,亦可是显示于显示模块82的虚拟按键,且经由显示模块82电性连接至控制模块84。
32.举例来说,当使用者不需要所述手足协同运动机提供上肢辅助功能,只需所述手足协同运动机提供下肢辅助功能时,使用者能关闭所述第一启动开关861并启动所述第二启动开关862,使所述控制模块84停止控制所述第一驱动模块30即所述第一马达32,此时使用者完全靠自己的施力操控所述第一操控件24,并依照使用者施力的程度控制所述第一转动件22之转速,而所述控制模块84仍能控制所述第二驱动模块50,以使所侦测的所述第一转速与所述第二转速之所述差值δv小于或等于所述预定差值δva,即所述控制模块84能控制所述第二驱动模块50带动所述第二转动件42增加转速,以提升所述第二转速,使所述第一转速与所述第二转速之所述差值δv小于或等于所述预定差值δva,进而达到辅助下肢进行周期性的绕转运动之功效。
33.以上所述仅为本发明优选可行实施例而已,举凡应用本发明说明书及申请专利范围所为之等效变化,理应包含在本发明之专利范围内。
34.附图标记说明
35.[本发明]
[0036]
1:手足协同运动机
[0037]
10:机架
[0038]
20:上肢运动机构
[0039]
22:第一转动件
[0040]
221:第一皮带轮
[0041]
222:第一皮带
[0042]
24:第一操控件
[0043]
241:握把
[0044]
242:第一曲柄
[0045]
30:第一驱动模块
[0046]
32:第一马达
[0047]
40:下肢运动机构
[0048]
42:第二转动件
[0049]
421:第二皮带轮
[0050]
422:第二皮带
[0051]
44:第二操控件
[0052]
441:踏板
[0053]
442:第二曲柄
[0054]
50:第二驱动模块
[0055]
52:第二马达
[0056]
60:第一转速传感器
[0057]
70:第二转速传感器
[0058]
80:控制面板
[0059]
82:显示模块
[0060]
84:控制模块
[0061]
86:启动开关
[0062]
861:第一启动开关
[0063]
862:第二启动开关
[0064]
δv:差值
[0065]
δva:预定差值
[0066]
s201~s205:步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1