一种具有减重机构的步态助行训练机构的制作方法
1.本发明涉及医疗康复设备技术领域,具体涉及一种具有减重机构的步态助行训练机构。
背景技术:
2.目前脑中卒造成的下肢偏瘫病人的步态训练多采用人工辅助或设备辅助训练,由于步态助行训练系统能够通过机器进行仿步态训练,减轻治疗师的工作,传统的步态助行训练设备通过患者手扶扶手架进行腿部的运动和训练,由于病人的身体控制能力和运动机能较差,在使用时可能造成病人在步态助行训练设备摔倒或失去控制,安全性较差且容易对病人造成二次伤害,同时对于瘫痪症状较严重的患者,根本无法通过手扶借力进行训练,导致步态助行训练设备对重症患者的治疗效果不佳。
3.此外,传统的步态助行训练设备仅通过偏心轮的运动实现步态的模拟,其运动过程仅为偏心轮的回转运动,运动轨迹单一,与人类日常行走的步态有所区别,且其运动幅度较为固定且不便调节,对于瘫痪程度不同的病人不能够灵活进行使用和调节,使用局限且治疗效果较差。
4.中国专利申请“cn106176141a一种步态助行训练装置
”ꢀ
提出一种通过车轮的偏心运动,主动带动在其上的病人进行仿步态训练的机器,但其在对病人进行训练的过程中,安全防护措施较为简陋,仅通过扶手使病人借力并对病人形成保护,不适宜瘫痪程度较重或站立运动能力较差的病人进行使用,且其对步态的仿真仅通过偏心轮和左右踏板进行实现,与真实步态仿真存在差距,不利于病人更好的康复训练效果。
技术实现要素:
5.为了解决现有技术中传统步态训练机构缺乏对病人的保护和助力导致病人无法训练或训练受伤、步态模拟与人类真实步态存在区别且运动幅度不能灵活调节以适应病人不同患病程度的问题。本发明提出一种具有减重机构的步态助行训练机构。
6.一种具有减重机构的步态助行训练机构,包括底架、设置在底架上相连接的动力装置和驱动装置、设置在在驱动装置上的左踏板和右踏板、设置在底架一端上方的扶手架以及设置在底架另一端上方的座椅,所述扶手架上方架设有减重架,所述减重架末端悬空于底架中部上方且减重架末端下方通过绳索悬吊有助行马甲;所述左踏板和右踏板上方均通过步态装置连接有脚踏槽,所述脚踏槽侧面设置有脚部固定装置;所述动力装置包括依次设置的电机、电磁离合器、传动链轮以及磁控轮,所述传动链轮通过链条与驱动装置连接。
7.进一步地,还包括蓄电池和控制面板,所述蓄电池设置于座椅,下方,所述控制面板架设于扶手架上,蓄电池通过连接线与动力装置、减重架以及控制面板连接,控制面板通过通信线与动力装置以及减重架连接。
8.进一步地,所述驱动装置包括左驱动单元和右驱动单元,所述左驱动单元和右驱
动单元均包括两组具有偏心轴的轮对,左驱动单元和右驱动单元的同轴轮对间通过转轴连接,所述传动链轮通过链条与其中一个转轴传动,所述偏心轴上套合有与其铰接的套筒,所述左踏板和右踏板两端下方与套筒固定连接。
9.进一步地,所述左驱动单元和右驱动单元中的偏心轴相对于轮对的中心轴错位设置。
10.进一步地,所述减重架包括与扶手架固定连接的竖向伸缩杆以及与伸缩杆的活动端相连接的横向“y”字形吊架,所述绳索的两端分别与吊架末端的分叉连接,助行马甲固定在绳索中部。
11.进一步地,所述伸缩杆侧面设置有直线运动件,所述直线运动件的固定端与伸缩杆的固定端连接,直线运动件的活动端与伸缩杆的活动端连接。
12.进一步地,所述助行马甲为由绑带构成的马甲状悬吊固定装置。
13.进一步地,所述步态装置包括设置在左踏板或右踏板中部上方的滑轨、设置在滑轨上的滑块、设置在滑块两侧的侧板、连接在两侧板间且位于左踏板或右踏板下方的悬浮块以及与悬浮块连接的阻尼调节装置,所述悬浮块与左踏板或右踏板下表面间存在间距,所述阻尼调节装置一端固定在左踏板或右踏板下表面,另一端与悬浮块连接。
14.进一步地,所述动力装置通过支架固定在底架上,所述电机的转轴与传动链轮的轴通过电磁离合器连接,电机的转轴通过键连接与电磁离合器连接,传动链轮的轴通过连接座与电磁离合器连接,所述磁控轮通过法兰与传动链轮的轴与连接。
15.进一步地,所述底架外侧设置有外壳且底架底部四角处设置有高度可调节的支脚,且底架底部其中一端的两角处设置有滚轮。
16.与现有技术相比,本发明的有益效果是:本发明提出一种具有减重机构的步态助行训练机构,通过减重架以及通过绳索悬吊在减重架上的助行马甲的设置,在使用步态助行训练机构进行训练时,若病人肌力较小则可通过助行马甲对病人进行助力和保护,方便病人进行小幅度的有效训练,若病人肌力正常则通过助行马甲对病人进行安全保护,防止病人在训练时突然失力而受伤;通过动力装置的设置,为驱动装置以及提供动力以通过脚踏槽带动病人进行腿部训练,其中电机提供动力,电磁离合器控制电机动力的是否接通,用以控制步态助行训练机构进行主动或被动训练,通过磁控轮的设置,对被动训练的动力进行调节,进而控制被动训练时病人的腿部运动频率;通过步态装置的设置,保证了步态模拟的真实性,通过滑轨、滑块、侧板、悬浮块以及阻尼调节装置的设置,使病人在进行主动训练时,脚部在脚踏槽内具有滑移的步态而更接近人类真实步态,通过对阻尼调节装置进行调节,可以增加病人的训练效果,循序渐进而使病人达到良好的训练效果。
附图说明
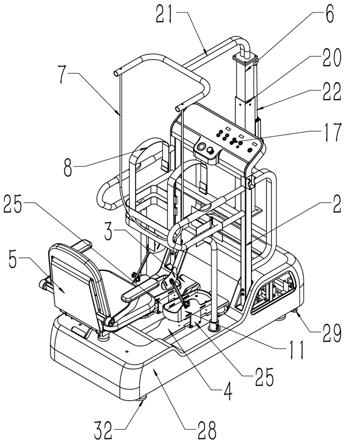
17.图1是本发明一种具有减重机构的步态助行训练机构的整体结构示意图。
18.图2是本发明一种具有减重机构的步态助行训练机构的无外壳整体结构示意图。
19.图3是本发明一种具有减重机构的步态助行训练机构的底架处结构示意图。
20.图4是本发明一种具有减重机构的步态助行训练机构的扶手架和减重架结构示意
图。
21.图5是本发明一种具有减重机构的步态助行训练机构的绳索和助行马甲结构示意图。
22.图6是本发明一种具有减重机构的步态助行训练机构的步态装置和右踏板连接结构示意图一。
23.图7是本发明一种具有减重机构的步态助行训练机构的步态装置和右踏板连接结构示意图二。
24.图8是本发明一种具有减重机构的步态助行训练机构的动力装置整体结构示意图一。
25.图9是本发明一种具有减重机构的步态助行训练机构的动力装置整体结构示意图二。
26.附图标号为1为底架,2为扶手架,3为左踏板,4为右踏板,5为座椅,6为减重架,7为绳索,8为助行马甲,11为脚踏槽,12为电机,13为电磁离合器,14为传动链轮,15为磁控轮,16为蓄电池,17为控制面板,18为轮对,19为套筒,20为伸缩杆,21为吊架,22为直线运动件,23为滑轨,24为滑块,25为侧板,26为悬浮块,27为阻尼调节装置,28为外壳,29为滚轮,30为连接座,31为法兰,32为支脚,33为支架。
具体实施方式
27.下面结合附图和具体实施例对本发明作进一步解释说明:如图 1~9所示,一种具有减重机构的步态助行训练机构,包括底架1、设置在底架1上相连接的动力装置和驱动装置、设置在在驱动装置上的左踏板3和右踏板4、设置在底架1一端上方的扶手架2以及设置在底架1另一端上方的座椅5,所述扶手架2上方架设有减重架6,所述减重架6末端悬空于底架1中部上方且减重架6末端下方通过绳索7悬吊有助行马甲8;所述左踏板3和右踏板4上方均通过步态装置连接有脚踏槽11,所述脚踏槽11侧面设置有脚部固定装置;所述动力装置包括依次设置的电机12、电磁离合器13、传动链轮14以及磁控轮15,所述传动链轮14通过链条与驱动装置连接。
28.通过底架1、动力装置、驱动装置、左踏板3、右踏板4、扶手架2、减重架6、助行马甲8、脚踏槽11以及步态装置的设置,构成一种具有减重保护功能的、主被动训练模式可切换且运动频率可调节的、步态模拟仿真接近真实状态的步态助行训练机构,对不同患病程度的病人进行灵活、安全且可靠的康复训练。
29.作为一种可实施方式,所述步态助行训练机构还包括蓄电池16和控制面板17,所述蓄电池16设置于座椅5,下方,所述控制面板17架设于扶手架2上,蓄电池16通过连接线与动力装置、减重架6以及控制面板17连接,控制面板17通过通信线与动力装置以及减重架6连接。
30.可以理解的是,步态训练机构在对病人进行被动训练时需要进行供电,供电方式可选用直接连接电源或通过蓄电池进行供电,本实施例采用蓄电池的供电方式为步态训练机构进行供电,增加了步态训练机构的灵活性,使其对病人的训练不受电源接口的影响,可在远离电源接口的场合对病人进行训练。
31.作为一种可实施方式,所述驱动装置包括左驱动单元和右驱动单元,所述左驱动
单元和右驱动单元均包括两组具有偏心轴的轮对18,左驱动单元和右驱动单元的同轴轮对间通过转轴连接,所述传动链轮14通过链条与其中一个转轴传动,所述偏心轴上套合有与其铰接的套筒19,所述左踏板3和右踏板4两端下方与套筒19固定连接。
32.具体的,所述左驱动单元和右驱动单元中的偏心轴相对于轮对18的中心轴错位设置。
33.可以理解的是,驱动装置将动力装置的旋转运动转化为周期性的回转运动,所述回转运动模拟人类行走的步态,其中左驱动单元和右驱动单元中的偏心轴相对于轮对18的中心轴错位设置使左腿和右腿的训练存在交错,模拟人类行走的前后交替动作,使左踏板3和右踏板4的运动轨迹与人类行走轨迹相契合。
34.作为一种可实施方式,所述减重架6包括与扶手架2固定连接的竖向伸缩杆20以及与伸缩杆20的活动端相连接的横向“y”字形吊架21,所述绳索7的两端分别与吊架21末端的分叉连接,助行马甲8固定在绳索7中部。
35.具体的,所述伸缩杆20侧面设置有直线运动件22,所述直线运动件22的固定端与伸缩杆的固定端连接,直线运动件的活动端与伸缩杆的活动端连接;所述助行马甲8为由绑带构成的马甲状悬吊固定装置。
36.通过减重架6以及通过绳索7悬吊在减重架6上的助行马甲8的设置,在使用步态助行训练机构进行训练时,若病人肌力较小则可通过助行马甲8对病人进行助力和保护,方便病人进行小幅度的有效训练,若病人肌力正常则通过助行马甲8对病人进行安全保护,防止病人在训练时突然失力而受伤。
37.可以理解的是,伸缩杆20以及直线运动件22的设置,使减重架6具有高度调节的功能,适用于对不同身高病人的减重和助力工作,同时也方便了病人穿戴助行马甲8的过程,病人穿戴时可将吊架21高度降低,使病人能够在座椅5上完成对助行马甲8的穿戴,再通过提升吊架21的高度使病人站立进行训练。
38.作为一种可实施方式,所述步态装置包括设置在左踏板3或右踏板4中部上方的滑轨23、设置在滑轨23上的滑块24、设置在滑块24两侧的侧板25、连接在两侧板25间且位于左踏板3或右踏板4下方的悬浮块26以及与悬浮块26连接的阻尼调节装置27,所述悬浮块26与左踏板3或右踏板4下表面间存在间距,所述阻尼调节装置27一端固定在左踏板3或右踏板4下表面,另一端与悬浮块26连接。
39.通过步态装置的设置,保证了步态模拟的真实性,通过滑轨23、滑块24、侧板25、悬浮块26以及阻尼调节装置27的设置,使病人在进行主动训练时,脚部在脚踏槽11内实现滑移的步态而更接近人类真实步态,通过对阻尼调节装置27对步态装置的阻尼进行调节,可以增加病人的训练效果,循序渐进增加阻尼而使病人达到良好的训练效果。
40.进一步地,所述动力装置通过支架33固定在底架1上,所述电机12的转轴与传动链轮14的轴通过电磁离合器13连接,电机12的转轴通过键连接与电磁离合器13连接,传动链轮14的轴通过连接座30与电磁离合器13连接,所述磁控轮15通过法兰31与传动链轮14的轴与连接。
41.通过动力装置的设置,为驱动装置以及提供动力以通过脚踏槽11带动病人进行腿部训练,其中电机12提供动力,电磁离合器13控制电机12的动力与传动链轮14是否接通,用以控制步态助行训练机构进行主动或被动训练,通过磁控轮15的设置,对被动训练的动力
进行调节,进而控制被动训练时病人的腿部运动频率。
42.进一步地,所述底架1外侧设置有外壳28且底架1底部四角处设置有高度可调节的支脚32,且底架1底部其中一端的两角处设置有滚轮29。
43.在具体使用时,首先将吊架21通过伸缩杆20和直线运动件22降低,将病人转移至座椅5上并在座椅上对病人进行助行马甲8的穿戴和固定,病人的脚放置在脚踏槽11内后通过脚部固定装置将病人的脚部固定,使病人的脚不脱离脚踏槽11,可以理解的是,可采用绑带将病人的腿部与的腿部固定装置固定。
44.随后通过在控制面板17上选则主动训练或被动训练模式,若选择主动训练模式则对步态装置的阻尼进行调节,使其适应病人的训练程度,所述阻尼调节通过阻尼调节装置实现,若选择被动训练模式则除对步态装置的阻尼进行调节之外,还需要对病人行走的运动频率进行调节,可以理解的是,运动频率的调节由磁控轮15调控传动链轮14的转速来实现。
45.模式选择及设定完成后,通过伸缩杆20和直线运动件22将吊架21提升,病人跟随吊架21的提升而站立,通过控制吊架21提升的高度来适应病人的身高以及控制对病人减重助力的程度,通常情况下,若吊架21提升越高,则助行马甲8对病人的减重助力程度越高,适合行动能力较差和瘫痪症状严重的病人使用,若吊架21提升越低,则助行马甲8对病人的减重助力程度越低,适合行动能力较好、瘫痪症状轻微的病人使用。
46.在病人的被动训练过程中,动力装置带动驱动装置动作,进而将动作通过左踏板3和右踏板4传递至病人脚部,其具体工作过程为:被动训练过程中电磁离合器13控制电机12的转轴与传动链轮14的轴连接,电机12转动带动传动链轮14转动,同时磁控轮15对传动链轮14的转动速度进行调控,传动链轮14通过链条与轮对18间的转轴传动而将动力传动至左驱动单元和右驱动单元,轮对18旋转使偏心轴转动,左驱动单元中的两组轮对18同步转动,且两组轮对18上的偏心轴在相同相位同步转动,由于左踏板3两端通过套筒19与偏心轴铰接,轮对18转动的同时,偏心轴带动左踏板3做周期性的回转动作,与之同理的,右驱动单元与左驱动单元具有相同的运动过程,其区别仅在于右驱动单元中偏心轴相对于轮对18中心轴的相位与左驱动单元中偏心轴相对于轮对18中心轴的相位不同,由于偏心轴相位的不同而使左驱动单元和右驱动单元具有错开的运动轨迹,模仿人类行走时左右腿的交替动作。
47.左踏板3和右踏板4均通过步态装置与脚踏槽11连接,步态装置在工作时,依靠滑块24在滑轨23上的滑动实现脚踏槽11一定程度的滑移,滑块24和滑轨23的滑动阻力通过阻尼调节装置27进行实现,步态装置的直线滑移结合左踏板3和右踏板4的周期性回转,使病人训练时的步态更加接近真实情况下的步态仿真,有利于病人的康复训练。
48.在病人的主动训练过程中,由病人的自主运动带动驱动装置动作,驱动装置带动左踏板3和右踏板4回转动作,步态装置实现脚踏槽11与左踏板3和右踏板4的滑移动作,共同实现病人步态轨迹的仿真,使病人按照既定步态轨迹进行康复训练,其驱动装置、左踏板3、右踏板4以及步态装置间的传动与被动训练时传动原理相同,这里不再赘述。
49.以上所述之实施例,只是本发明的较佳实施例而已,并非限制本发明的实施范围,故凡依本发明专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本发明申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1