玩具车的制作方法
1.本实用新型涉及玩具的技术领域,尤其涉及一种玩具车。
背景技术:
2.现有的玩具车中,存在许多模拟各种动物形态的玩具车,通过外形设计和结构设计去模拟动物的外形、神态、各种动作和声音,使得玩具车具备模拟动物在不同场景或不同情境下做出不同反应的功能。但在目前的市场上缺乏一种能够模仿动物遇到障碍能够自动后退并调整移动路线的玩具车。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种能够仿动物遇到障碍能够自动后退并调整移动路线的玩具车。
4.本实用新型的技术方案提供一种玩具车,包括壳体以及设置在所述壳体底部的轮组,所述轮组包括驱动轮单元和摆动轮单元,所述壳体内设有用于驱动所述驱动轮单元的驱动机构;
5.所述玩具车正常前进时,所述驱动机构驱动所述驱动轮单元正向转动,所述摆动轮单元的摆动轮轴与所述驱动轮单元的驱动轮轴相互平行;
6.当玩具车前进过程中遇到障碍物时,所述驱动机构驱动所述驱动轮单元反向转动,所述摆动轮轴相对于所述驱动轮轴摆动并改变角度,使得所述玩具车以不同于前进路线的路径后退移动。
7.进一步地,所述摆动轮单元还包括安装座和摆动车轮,其中所述安装座上设置有一个摆动孔,所述摆动孔的横截面为梯形,所述摆动轮轴安装在所述摆动孔内,所述摆动车轮安装在所述摆动轮轴的两端;
8.当所述玩具车前进时,所述摆动轮轴摆动至所述摆动孔的后侧,并与所述驱动轮轴相互平行,所述玩具车按直线轨迹行进;
9.当所述玩具车后退时,所述摆动轮轴摆动至所述摆动孔的前侧,相对于所述驱动轮轴摆动并改变角度,所述玩具车按弧线轨迹后退移动。
10.进一步地,还包括第一触发件,所述第一触发件安装在所述壳体的前侧,当所述玩具车前进过程中遇到障碍物时,触发所述第一触发件,所述第一触发件控制所述驱动机构反向转动。
11.进一步地,所述第一触发件包括轻触开关,所述轻触开关与控制电路连接,所述控制电路用于控制所述驱动机构。
12.进一步地,所述驱动机构包括第一电机和第一传动组件,所述第一电机通过所述第一传动组件驱动所述驱动轮单元。
13.进一步地,还包括变形件和第二触发件,所述变形件安装在所述壳体上,所述第二触发件安装在所述壳体上;
14.当触发所述第二触发件时,所述变形件变形。
15.进一步地,所述第二触发件为红外传感器,设置在所述壳体的顶部。
16.进一步地,所述第二触发件被触发前,所述变形件覆盖在所述壳体的顶部;
17.所述第二触发件被触发时,所述变形件向后向下翻转,使所述玩具车离地并停止行驶。
18.进一步地,还包括翻转机构,所述翻转机构包括第二电机、第二传动组件和翻转件,所述第二电机通过所述第二传动组件带动所述翻转件前后翻转,所述翻转件伸出所述壳体并与所述变形件固定连接。
19.进一步地,所述壳体上安装有限位件,所述翻转件包括转动部、第一摆臂和第二摆臂,所述转动部与所述第二传动组件连接,并且穿出所述壳体,所述第一摆臂和所述第二摆臂分别连接在所述转动部的相对两侧;
20.所述变形件向前翻转时,所述第一摆臂与所述限位件触碰限位;
21.所述变形件向后翻转时,所述第二摆臂与所述限位件触碰限位。
22.采用上述技术方案后,具有如下有益效果:
23.本实用新型中当玩具车前进过程中遇到障碍物时,所述驱动机构驱动所述驱动轮单元反向转动,所述摆动轮轴相对于所述驱动轮轴摆动并改变角度,使得所述玩具车以不同于前进路线的路径后退移动,模仿动物遇到障碍能够自动后退并调整移动路线。
附图说明
24.参见附图,本实用新型的公开内容将变得更易理解。应当理解:这些附图仅仅用于说明的目的,而并非意在对本实用新型的保护范围构成限制。图中:
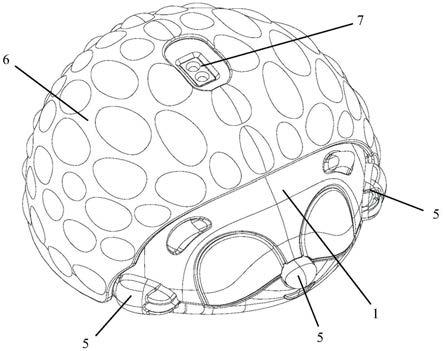
25.图1是本实用新型一实施例中玩具车的变形前的立体图;
26.图2是本实用新型一实施例中玩具车的变形后的立体图;
27.图3是本实用新型一实施例中玩具车的底部示意图;
28.图4是本实用新型一实施例中玩具车的安装座的一侧面的示意图;
29.图5是本实用新型一实施例中玩具车的安装座的另一侧面的示意图;
30.图6是本实用新型一实施例中玩具车的摆动轮单元在前进时的状态图;
31.图7是本实用新型一实施例中玩具车的摆动轮单元在后进时的状态图;
32.图8是本实用新型一实施例中玩具车的驱动机构的示意图;
33.图9是本实用新型一实施例中玩具车的翻转机构的示意图;
34.图10是本实用新型一实施例中玩具车的翻转机构翻转前的示意图;
35.图11是本实用新型一实施例中玩具车的翻转机构向后翻转时的示意图。
36.附图标记对照表:
37.壳体1;
38.驱动轮单元2:驱动轮轴21、驱动车轮22;
39.摆动轮单元3:摆动轮轴31、安装座32、摆动车轮33、摆动孔321、纵向管柱322、横向管柱323;
40.驱动机构4:第一电机41、第一传动组件42;
41.第一触发件5、第二触发件7、限位件9;
42.变形件6:通孔61;
43.翻转机构8:第二电机81、第二传动组件82、翻转件83、转动部831、第一摆臂832、第二摆臂833。
具体实施方式
44.下面结合附图来进一步说明本实用新型的具体实施方式。
45.容易理解,根据本实用新型的技术方案,在不变更本实用新型实质精神下,本领域的一般技术人员可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本实用新型的技术方案的示例性说明,而不应当视为本实用新型的全部或视为对实用新型技术方案的限定或限制。
46.在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。
47.本实用新型一实施例中,如图1
‑
3所示,玩具车,包括壳体1以及设置在壳体1底部的轮组,轮组包括驱动轮单元2和摆动轮单元3,壳体1内设有用于驱动驱动轮单元2的驱动机构4;
48.玩具车正常前进时,驱动机构4驱动驱动轮单元2正向转动,摆动轮单元3的摆动轮轴31与驱动轮单元2的驱动轮轴21相互平行;
49.当玩具车前进过程中遇到障碍物时,驱动机构4驱动驱动轮单元2反向转动,摆动轮轴31相对于驱动轮轴21摆动并改变角度,使得玩具车以不同于前进路线的路径后退移动。
50.具体为,如图3所示,驱动轮单元2和摆动轮单元3安装在壳体1的底部,驱动轮单元2和摆动轮单元3转动时,能够带动玩具车行驶。
51.驱动机构4安装在壳体1的内部,用于驱动驱动轮单元2正向或反向转动。
52.当驱动机构4驱动驱动轮单元2的驱动车轮22正向转动时,摆动轮单元3的摆动轮轴31(参见图6)与驱动轮单元2的驱动轮轴21(参见图8)相互平行,驱动轮轴21的位置始终不变。如图6所示,此时摆动轮轴31与驱动轮轴21是平行的,均沿玩具车的左右方向延伸,此时玩具车能够向前沿直线方向行驶。
53.当玩具车前进过程中遇到障碍物时,驱动机构4驱动驱动轮单元2反向转动,如图7所示,摆动轮轴31相对于驱动轮轴21摆动并改变角度,此时玩具车后退同时转向,从而绕开了障碍物。
54.当玩具车绕开障碍物时,驱动机构4再次驱动驱动轮单元2正向转动,使玩具车再次向前行驶。
55.本实施例中的驱动轮单元2位于玩具车的前侧,驱动车轮22为前轮,摆动轮单元3位于玩具车的后侧,摆动车轮33为后轮。
56.可选地,驱动轮单元2还可以位于玩具车的后侧,摆动轮单元3还可以位于玩具车的前侧。
57.进一步地,如图4
‑
7所示,摆动轮单元3还包括安装座32和摆动车轮33,其中安装座
32上设置有一个摆动孔321,摆动孔321的横截面为梯形,摆动轮轴31安装在摆动孔321内,摆动车轮33安装在摆动轮轴31的两端;
58.当玩具车前进时,摆动轮轴31摆动至摆动孔321的后侧,并与驱动轮轴21相平行,玩具车按直线轨迹行进;
59.当玩具车后退时,摆动轮轴31摆动至摆动孔321的前侧,相对于驱动轮轴21摆动并改变角度,玩具车按弧线轨迹后退移动。
60.具体为,如图4
‑
5所示,安装座32安装在壳体1的后侧底部,安装座32包括纵向管柱322和横向管柱323,纵向管柱322插入到壳体1的内部,摆动孔321开设在横向管柱323中。
61.摆动孔321的横截面为梯形,图4一侧的开口较大,图5一侧的开口较小,使得摆动轮轴31能够在摆动孔321中前后摆动。
62.如图6所示,摆动轮轴31插入到摆动孔321中后,当玩具车前进时,摆动轮轴31在惯性的作用下摆动至摆动孔321的后侧,摆动孔321的后侧所在的直线与驱动轮轴21所在的轴线相互平行,使得摆动轮轴31与驱动轮轴21相互平行,玩具车按直线轨迹行进;
63.如图7所示,当玩具车后退时,摆动轮轴31在惯性的作用下摆动至摆动孔321的前侧,摆动孔321的前侧所在的直线相对于驱动轮轴21的轴线呈一定角度,使得摆动轮轴31相对于驱动轮轴21摆动并改变角度,玩具车按弧线轨迹后退移动。
64.本实施例中,由于摆动轮单元3位于玩具车的后侧,因此当玩具车前进时,摆动轮轴31在惯性的作用下向后侧摆动;后退时,摆动轮轴31在惯性的作用下向前侧摆动。
65.可选地,当摆动轮单元3安装在玩具车的前侧,驱动轮单元2安装在玩具车的后侧。当玩具车前进时,摆动轮轴31在惯性的作用下向前侧摆动;当玩具车后退时,摆动轮轴31在惯性的作用下向后侧摆动。
66.可选地,驱动轮单元2还可以安装在玩具车的底部中心,或前侧、后侧均安装有。
67.可选地,摆动轮单元3的摆动也可以通过单独设置一套电机和传动单元来实现摆动车轮33的摆动,从而实现玩具车的转向。
68.进一步地,如图1所示,还包括第一触发件5,第一触发件5安装在壳体1的前侧,当玩具车前进过程中遇到障碍物时,触发第一触发件5,第一触发件5控制驱动机构4反向转动。
69.当玩具车在前进过程中遇到障碍物时,第一触发件5与障碍物触碰,第一触发件5发出信号,控制电路控制驱动机构4反向转动,驱动机构4带动驱动轮单元2反向转动,使得玩具车向后同时转向,从而绕开障碍物。
70.本实施例中,如图1所示,壳体1为刺猬造型,第一触发件5为鼻子和手部造型,第一触发件5包括轻触开关,轻触开关与控制电路连接,控制电路用于控制驱动机构4。
71.本实施例中第一触发件5有三个,分别设置在刺猬的鼻子和两个手部。鼻子和手部相对于壳体1可以活动,内部安装有轻触开关,轻触开关与控制电路连接。
72.当其中任意一个第一触发件5被触发时,轻触开关被接通,控制电路控制驱动机构4先停止转动,然后反向转动。使得玩具车触碰到障碍物时,先停止前进,然后再向后移动并转向。
73.可选地,第一触发件5还可以是红外传感器,当前方设定范围内出现障碍物时,玩具车能够向后移动并转向。不需要直接触碰到障碍物,防止碰撞时损坏玩具车。
74.进一步地,如图8所示,驱动机构4包括第一电机41和第一传动组件42,第一电机41通过第一传动组件42驱动驱动轮单元2。
75.第一电机41和第一传动组件42安装在壳体1的内部,第一传动组件42与驱动轮轴21上的齿轮传动。第一电机41转动时,能够驱动驱动轮轴21带动两个驱动车轮22转动。
76.进一步地,如图1
‑
2所示,还包括变形件6和第二触发件7,变形件6安装在壳体1上,第二触发件7安装在壳体1上;
77.当触发第二触发件7时,变形件6变形。
78.本实施例中,第二触发件7为红外传感器,设置在壳体1的顶部。
79.壳体1为刺猬造型,变形件6为刺猬刺造型;
80.第二触发件7被触发前,变形件6覆盖在壳体1的顶部;
81.第二触发件7被触发时,变形件6向后向下翻转,使玩具车离地并停止行驶。
82.具体为,如图1所示,为第二触发件7触发前的状态。变形件6大致为半圆形壳,变形件6覆盖在壳体1的顶部,模拟刺猬身上的刺的造型。变形件6上开设有通孔61,第二触发件7从通孔61露出。
83.当玩家的手部作用在第二触发件7上方时,模拟抓住刺猬的动作。如图2所示,变形件6向后向下翻转,模拟刺猬的刺遇到危险时,向后缩起的状态。此时,变形件6翻转到壳体1的底部,使玩具车的轮组离地悬空,玩具车停止行驶。
84.当玩具的手部从第二触发件7上方移开时,变形件6向前向上翻转到图1的状态。此时,玩具车可以继续行驶。
85.可选地,玩具车还可以为其他的造型,变形件6也可以为其他的身体部位的造型。例如:玩具车还可以为小兔子造型,变形件6可以为兔子的耳朵造型,当第二触发件7被触发时,变形件6可以向上翻转,模拟小兔子受惊时,耳朵竖起的状态。
86.进一步地,如图9所示,还包括翻转机构8,翻转机构8包括第二电机81、第二传动组件82和翻转件83,第二电机81通过第二传动组件82带动翻转件83前后翻转,翻转件83伸出壳体1并与变形件6固定连接。
87.当第二触发件7被触发时,控制电路控制第二电机81转动,第二电机81通过第二传动组件82带动翻转件83向后转动。
88.如图3所示,翻转件83安装在变形件6的底部内侧。
89.如图10所示,翻转件83插入到壳体1内部,翻转件83向后翻转时,带动变形件6向后翻转。
90.进一步地,如图10
‑
11所示,壳体1上安装有限位件9,翻转件83包括转动部831、第一摆臂832和第二摆臂833,转动部831与第二传动组件82连接,并且穿出壳体1,第一摆臂832和第二摆臂833分别连接在转动部831的相对两侧;
91.变形件6向前翻转时,第一摆臂832与限位件9触碰限位;
92.变形件6向后翻转时,第二摆臂833与限位件9触碰限位。
93.其中,第一摆臂832和第二摆臂833与变形件6连接,限位件9位于壳体1的前侧。
94.如图10所示,当第二触发件7被触发前,变形件6覆盖在壳体1的顶部时,第一摆臂832与限位件9接触。
95.如图11所示,当第二触发件7被触发时,翻转件83向后翻转,直到第二摆臂833与限
位件9触碰时,第二电机81停止转动,将变形件6保持在向后翻转的位置。
96.当第二触发件7的检测范围内没有物体时,第二电机81反向转动,翻转件83向前翻转,直到第一摆臂832与限位件9触碰,第二电机81停止转动。
97.本实用新型的一优选实施例中,玩具车底部设置有一组前轮和一组后轮,其中前轮为驱动轮单元2,后轮为摆动轮单元3。玩具车的壳体1顶部设置有变形件6和红外传感器(第二触发件7),壳体1设计为模拟刺猬造型的外形,变形件6设计为模拟刺猬覆盖在身上的刺;壳体1前端设置了三个第一触发件5,分别布置于刺猬的鼻子和手部。
98.玩具车前进过程中,刺猬鼻子或者手部碰撞到障碍物,触发第一触发件5,轻触开关产生电信号传输至电路板,进而控制驱动机构4反转,反转后退的同时,摆动车轮33在惯性作用下与前轮形成角度差,使得玩具车能够以弧线路径后退形式,改变其前进的方向,从而在再次前进行驶时避开障碍物。
99.当玩具车顶部出现物体,比如人手扫过玩具车上方(模拟捕捉刺猬的动作),被红外传感器检测该运动,则玩具车的立马停止移动,并且驱动机构驱动变形件6向后翻转,模拟刺猬在遇到危险时,将身体卷起的状态。该状态持续数秒钟之后,变形件6恢复至原位置,玩具车重新前进行驶。
100.玩具车的电池仓、开关和扬声器均设置在玩具车的底部,扬声器能够发出模拟刺猬的音效和音乐,发出模拟刺猬在各种场景下的叫声和欢快的音乐,增加玩具车的趣味性和可玩性。
101.以上所述的仅是本实用新型的原理和较佳的实施例。应当指出,对于本领域的普通技术人员来说,在本实用新型原理的基础上,还可以做出若干其它变型,也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1