自主移动体、信息处理方法、程序和信息处理设备与流程
1.本技术涉及自主移动体、信息处理方法、程序和信息处理设备,并且具体地涉及使得用户能够体验对自主移动体进行规定的自主移动体、信息处理方法、程序和信息处理设备。
背景技术:
2.传统上已经尝试使动物型自主移动体的动作更接近实际动物的动作。例如,已经设计出执行用于指示地域的标记行为的动物型自主移动体(例如,参见专利文献1)。
3.引用列表
4.专利文献
5.专利文献1:wo 2019/138618 a
技术实现要素:
6.本发明要解决的问题
7.顺便提及,饲养宠物的乐趣之一是对宠物进行规定,使其能够执行所期望的动作。因此,通过使得可以对类似于实际宠物的自主移动体进行规定,可以期望将改善自主移动体的用户体验。
8.本技术是鉴于这种情况而做出的,并且使得用户能够体验对自主移动体的规定。
9.问题的解决方案
10.本技术的一方面的自主移动体包括:识别单元,其识别给出的指令;动作计划单元,其基于所识别的指令来计划动作;以及操作控制单元,其控制所计划的动作的执行,其中,动作计划单元随着作为预定动作的指令的动作指令被重复改变所述预定动作的内容。
11.本技术的一方面的信息处理方法:识别给出自主移动体的指令;基于识别的指令来计划自主移动体的动作,并且随着作为针对预定动作的指令的动作指令被重复,改变预定动作的内容;以及控制计划的自主移动体的动作的执行。
12.本技术的一方面的程序使计算机执行以下处理:识别给出自主移动体的指令;基于识别的指令来计划自主移动体的动作,并且随着作为针对预定动作的指令的动作指令被重复,改变预定动作的内容;以及控制计划的自主移动体的动作的执行。
13.本技术的一方面的信息处理设备包括:识别单元,其识别给出自主移动体的指令;动作计划单元,其基于识别的指令计划自主移动体的动作;以及操作控制单元,其控制计划的自主移动体的动作的执行,其中,动作计划单元随着作为针对预定动作的指令的动作指令被重复改变自主移动体的预定动作的内容。
14.根据本技术的一方面,识别给出自主移动体的指令,基于识别的指令计划自主移动体的动作,并且随着作为针对预定动作的指令的动作指令被重复改变预定动作的内容,并且执行计划的自主移动体的动作。
附图说明
15.图1是示出应用本技术的信息处理系统的实施方式的框图。
16.图2是示出自主移动体的硬件配置示例的图。
17.图3是包括在自主移动体中的致动器的配置示例。
18.图4是用于说明包括在自主移动体中的显示器的功能的图。
19.图5是示出自主移动体的操作示例的图。
20.图6是示出自主移动体的功能配置示例的框图。
21.图7是示出自主移动体的期望值计算单元的配置示例的框图。
22.图8是示出信息处理终端的功能配置示例的框图。
23.图9是示出信息处理服务器的功能配置示例的框图。
24.图10是示出基于教学的模式识别学习的概要的图。
25.图11是示出基于教学的运动识别学习的概要的图。
26.图12是示出基于教学的空间区域识别学习的概要的图。
27.图13是用于说明使用标记的教学的图。
28.图14是用于说明使用无线通信的教学的图。
29.图15是用于说明使用听不见的声音的教学的图。
30.图16是用于说明由自主移动体执行的模式识别学习处理的流程图。
31.图17是用于说明由自主移动体执行的动作控制处理的第一实施方式的流程图。
32.图18是示出促进期望值、抑制期望值和习惯期望值的时间序列转换的示例的图。
33.图19是示出总期望值随时间的时间序列转换的示例的图。
34.图20是用于说明计算习惯期望值的方法的图。
35.图21是用于说明由自主移动体执行的动作控制处理的第二实施方式的流程图。
36.图22是用于说明动作地点学习处理的细节的流程图。
37.图23是示出所指示的地点的聚类的示例的图。
38.图24是示出尿意系数随时间的时间序列转换的示例的图。
39.图25是用于说明由自主移动体执行的动作控制处理的第三实施方式的流程图。
40.图26是示出信息处理终端的用户界面的示例的图。
41.图27是示出信息处理终端的用户界面的示例的图。
42.图28是示出信息处理终端的用户界面的示例的图。
43.图29是示出信息处理终端的用户界面的示例的图。
44.图30是示出信息处理终端的用户界面的示例的图。
45.图31是示出信息处理终端的用户界面的示例的图。
46.图32是示出信息处理终端的用户界面的示例的图。
47.图33是示出信息处理终端的用户界面的示例的图。
48.图34是示出信息处理终端的用户界面的示例的图。
49.图35是示出信息处理终端的用户界面的示例的图。
50.图36是示出计算机的配置示例的图。
具体实施方式
51.以下是用于执行本技术的实施方式的描述。将按照以下顺序给出描述。
52.1.实施方式
53.2.修改
54.3.其他
55.《《1.实施方式》》
56.首先,将参照图1至图35描述本技术的实施方式。
57.《信息处理系统1的配置示例》
58.图1是示出应用本技术的信息处理系统1的实施方式的框图。
59.信息处理系统1包括自主移动体11-1至自主移动体11-n、信息处理终端12-1至信息处理终端12-n、以及信息处理服务器13。
60.注意,在下文中,在不需要将自主移动体11-1至自主移动体11-n彼此单独区分的情况下,将其简称为自主移动体11。在下文中,在不必将信息处理终端12-1至信息处理终端12-n彼此单独区分的情况下,将其简称为信息处理终端12。
61.在每个自主移动体11与信息处理服务器13之间、在每个信息处理终端12与信息处理服务器13之间、在每个自主移动体11与每个信息处理终端12之间、在自主移动体11之间、以及在信息处理终端12之间,可以经由网络21进行通信。此外,还可以在不通过网络21的情况下,在每个自主移动体11与每个信息处理终端12之间、自主移动体11之间以及信息处理终端12之间直接通信。
62.自主移动体11是基于所收集的传感器数据等识别自主移动体11及其周围的状况并根据状况自主地选择和执行各种操作的信息处理设备。自主移动体11的特征之一是其根据状况自主地执行适当的操作,这与仅根据用户的指令执行操作的机器人不同。
63.例如,自主移动体11可以基于捕获的图像执行用户识别、对象识别等,并且可以根据识别的用户、对象等执行各种自主动作。此外,自主移动体11还可以基于用户的话语执行例如语音识别,并且基于用户的指令等执行动作。
64.此外,自主移动体11执行模式识别学习以获取用户识别和对象识别的能力。此时,自主移动体11不仅可以基于给出的学习数据执行监督学习,而且可以通过基于用户等的教学动态地收集学习数据来执行与对象等相关的模式识别学习。
65.此外,自主移动体11可以由用户规定。此处,用于自主移动体11的规定比其中例如教授规则和禁止并使其被记住的一般规则更宽,并且意味着由于用户与自主移动体11交互而在自主移动体11中出现可以由用户感觉到的改变。
66.自主移动体11的形状、能力和期望水平等可以根据目的和角色适当地设计。例如,自主移动体11由在空间中自主移动并执行各种操作的自主移动机器人配置。具体地,例如,自主移动体11由具有模仿诸如人或狗的动物的形状和操作能力的自主移动机器人配置。此外,例如,自主移动体11由具有与用户通信的能力的车辆或另一设备配置。
67.信息处理终端12包括例如智能电话、平板终端、个人计算机(pc)等,并且由自主移动体11的用户使用。信息处理终端12通过执行预定的应用程序(以下简称为应用)来实现各种功能。例如,信息处理终端12经由网络21与信息处理服务器13通信或直接与自主移动体11通信,以收集关于自主移动体11的各种数据并将该数据呈现给用户,或向自主移动体11
给出指令。
68.例如,信息处理服务器13从每个自主移动体11和每个信息处理终端12收集各种数据,向每个自主移动体11和每个信息处理终端12提供各种数据,或者控制自主移动体11的操作。此外,例如,信息处理服务器13还可以基于从每个自主移动体11和每个信息处理终端12收集的数据,与自主移动体11类似地执行模式识别学习和对应于用户的规定的处理。此外,例如,信息处理服务器13将关于上述应用和每个自主移动体11的各种数据提供给每个信息处理终端12。
69.网络21包括例如诸如因特网、电话线网络和卫星通信网络的公共线路网络,包括以太网(注册商标)的各种局域网(lan)、广域网(wan)等中的一些。此外,网络21可以包括专用线路网络,例如互联网协议-虚拟专用网络(ip-vpn)。此外,网络21可以包括无线通信网络,例如wi-fi(注册商标)或蓝牙(注册商标)。
70.注意,信息处理系统1的配置可以根据规范、操作等而灵活地改变。例如,除了信息处理终端12和信息处理服务器13之外,自主移动体11还可以与各种外部设备执行信息通信。外部设备可以包括例如发送天气、新闻和其他服务信息的服务器,以及用户拥有的各种家用电器。
71.此外,例如,自主移动体11和信息处理终端12不一定必须具有一对一的关系,并且可以具有例如多对多、多对一或一对多的关系。例如,一个用户可以通过使用一个信息处理终端12确认关于多个自主移动体11的数据,或者通过使用多个信息处理终端确认关于一个自主移动体11的数据。
72.《自主移动体11的硬件配置示例》
73.接下来,将描述自主移动体11的硬件配置示例。注意,在下文中,将以自主移动体11是狗形四足步行机器人的情况为例进行描述。
74.图2是示出自主移动体11的硬件配置示例的图。自主移动体11是包括头部、主体、四条腿和尾巴的狗形四足步行机器人。
75.自主移动体11在头部包括两个显示器、显示器51l和显示器51r。注意,在下文中,在不必单独区分显示器51l和显示器51r的情况下,将其简称为显示器51。
76.此外,自主移动体11包括各种传感器。自主移动体11包括例如麦克风52、相机53、飞行时间(tof)传感器525、运动传感器55、距离测量传感器56、触摸传感器57、照度传感器58、唯一按钮59和惯性传感器60。
77.自主移动体11包括例如头部上的四个麦克风52。每个麦克风52收集环境声音,包括例如用户的话语和周围环境声音。此外,通过包括多个麦克风52,可以以高灵敏度收集周围环境中产生的声音并定位声源。
78.自主移动体11包括例如位于鼻尖和腰部处的两个广角摄像头53,并且捕获自主移动体11周围的图像。例如,布置在鼻尖处的相机53捕获自主移动主体11的前视场(即,狗的视场)中的图像。布置在腰部上的相机53捕获以自主移动体11的上部为中心的周围环境的图像。例如,自主移动体11可以基于由设置在腰部上的相机53捕获的图像,通过提取天花板上的特征点等来实现同时定位和映射(slam)。
79.tof传感器54例如设置在鼻尖处,并且检测到存在于头部前面的对象的距离。自主移动体11可以通过tof传感器54以高精度检测到各种对象的距离,并且可以根据与包括用
户、障碍物等的目标对象的相对位置来实现操作。
80.运动传感器55布置在例如胸部上,并且检测用户或由用户饲养的宠物的位置。自主移动体11可以通过由运动传感器55检测存在于前方的移动体来实现关于移动体的各种操作,例如与诸如兴趣、恐惧和惊喜的情绪相对应的操作。
81.距离测量传感器56例如布置在胸部上,并且检测自主移动体11前方的地板表面的状况。自主移动体11可以通过距离测量传感器56高精度地检测到与底板表面上存在的对象的距离,并且可以根据与对象的相对位置来实现操作。
82.触摸传感器57布置在用户很可能触摸自主移动体11的部分(例如,头顶、下巴下方、背部等),并且检测用户的接触。触摸传感器57例如由电容型或压敏型触摸传感器配置。自主移动体11可以通过触摸传感器57检测用户的诸如触摸、抚摸、击打或推动的接触动作,并且可以根据接触动作执行操作。
83.照度传感器58例如布置在头部后方表面上的尾巴的基部处,并且检测自主移动体11所在的空间中的照度。自主移动体11可以通过照度传感器58检测环境亮度并且根据亮度执行操作。
84.单独按钮59例如分别布置在与四条腿的爪对应的部分处,并且检测自主移动体11的腿的底部表面是否与地板接触。自主移动体11可以通过唯一按钮59检测与地板表面的接触或非接触,并且可以例如掌握自主移动体11被用户抬起。
85.惯性传感器60例如分别布置在头部和身体上,并且检测诸如头部和主体的速度、加速度和旋转的物理量。例如,每个惯性传感器60由检测x轴、y轴和z轴上的加速度和角速度的6轴传感器配置。自主移动体11可以通过惯性传感器60以高精度检测头部和主体的运动,并且可以根据状况实现操作控制。
86.注意,包括在自主移动体11中的传感器的配置可以根据规范、操作等而灵活地改变。例如,除了上述配置之外,自主移动体11还可以包括例如温度传感器、地磁传感器,包括全球导航卫星系统(gnss)信号接收器的各种通信设备等。
87.接下来,参照图3将描述自主移动体11的关节单元的配置示例。图3示出了包括在自主移动体11中的致动器71的配置示例。自主移动体11具有总共22个旋转自由度,这些旋转自由度是图3中所示的旋转点并且另外两个在耳朵和尾巴中并且一个在嘴中。
88.例如,自主移动体11在头部中具有三个自由度,使得其可以实现颈部的俯冲和倾斜两者。此外,通过由设置在腰部中的致动器71再现腰部的摆动运动,自主移动体11可以实现更接近真实狗的自然和灵活的运动。
89.注意,自主移动体11可以通过组合例如1轴致动器和2轴致动器来实现上述22个旋转自由度。例如,1轴致动器可以用于腿的肘部和膝部,而2轴致动器可以用于肩部和大腿的基部。
90.接下来,参照图4将描述包括在自主移动体11中的显示器51的功能。
91.自主移动体11包括分别与右眼和左眼相对应的两个显示器51r和51l。每个显示器51具有可视地表达自主移动体11的眼睛运动和情绪的功能。例如,显示器51可以根据情绪和运动来表达眼球、瞳孔和眼睑的运动,以产生类似于真实动物(例如狗)的自然运动,并且以高精度和灵活性来表达自主移动体11的视线和情绪。此外,用户可以从显示在显示器51上的眼球的运动直观地掌握自主移动体11的状态。
92.此外,显示器51由例如两个独立的有机发光二极管(oled)实现。通过使用oled,可以再现眼球的曲面。因此,与使用一个平面显示器来表达一对眼球的情况和使用两个独立的平面显示器来表达两个眼球的情况相比,可以实现更自然的外观。
93.利用上述配置,自主移动体11通过以高精度和高灵活性控制关节单元和眼球的运动来再现更接近真实生物体的运动和情感表达,如图5所示。
94.另外,图5是示出自主移动体11的操作示例的图;然而,在图5中,由于将通过集中于自主移动体11的关节单元和眼球的运动来给出描述,所以以简化的方式示出了自主移动体11的外部结构。
95.《自主移动体11的功能配置示例》
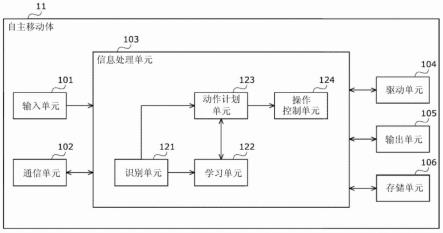
96.接下来,参照图6将描述自主移动体11的功能配置示例。自主移动体11包括输入单元101、通信单元102、信息处理单元103、驱动单元104、输出单元105和存储单元106。
97.输入单元101包括图2所示的各种传感器等,并且具有收集关于用户和周围环境的各种传感器数据的功能。此外,输入单元101包括例如诸如开关和按钮的输入设备。输入单元101将收集的传感器数据和经由输入装置输入的输入数据提供给信息处理单元103。
98.通信单元102经由网络21或不经由网络21与另一自主移动体11、信息处理终端12和信息处理服务器13通信,并且发送和接收各种数据。通信单元102将接收到的数据提供给信息处理单元103,并且获取要从信息处理单元103发送的数据。
99.注意,通信单元102的通信方法没有特别限制,并且可以根据规范和操作灵活地改变。
100.信息处理单元103例如包括诸如中央处理单元(cpu)的处理器,执行各种类型的信息处理,并且控制自主移动体11的每个单元。信息处理单元103包括识别单元121、学习单元122、动作计划单元123和操作控制单元124。
101.识别单元121基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来识别自主移动体11被放置的状况。自主移动体11被放置的状况包括例如自主移动体11和周围环境的状况。自主移动体11的状况例如包括自主移动体11的状态和运动。周围环境的状况包括例如诸如用户的周围人的状态、运动和指令;诸如宠物的周围生物的状态和运动;周围对象的状态和运动、时间,地点、周围环境等。周围对象包括例如另一自主移动体。此外,为了识别状况,识别单元121执行例如人物识别、面部表情或视线的识别、情绪识别、对象识别、运动识别、空间区域识别、颜色识别、形状识别、标记识别、障碍识别、步调识别、亮度识别、温度识别、语音识别、单词理解、位置估计、姿势估计等。
102.此外,识别单元121具有基于各种类型的识别信息估计和理解状况的功能。此时,识别单元121可以通过使用预先存储的知识来全面地估计状况。
103.识别单元121将指示状况的识别结果或估计结果的数据(以下称为状况数据)提供给学习单元122和动作计划单元123。此外,识别单元121将指示识别结果或状况估计结果的数据登记在存储在存储单元106中的动作历史数据中。
104.动作历史数据是指示自主移动体11的动作的历史的数据。动作历史数据包括例如以下各项:动作开始时的日期和时间、动作完成时的日期和时间、用于执行动作的触发、给出用于动作的指令的地点(然而,在指示地点的情况下)、执行动作时的状况,以及动作是否完成(动作是否执行到结束)。
105.作为用于执行动作的触发,例如,在由用户的指令触发执行动作的情况下,登记指令的细节。此外,例如,在由预定状况触发执行动作的情况下,登记状况的细节。此外,例如,在由用户指示的对象或识别的对象触发执行动作的情况下,登记对象的类型。
106.学习单元122基于从输入单元101提供的传感器数据和输入数据、从通信单元102提供的接收数据、从识别单元121提供的状况数据、从动作计划单元123提供的关于自主移动体11的动作的数据以及存储在存储单元106中的动作历史数据来学习状况和动作以及动作对环境的影响。例如,学习单元122执行上述模式识别学习,或者执行对应于用户的规定的动作模式的学习。
107.例如,学习单元122通过使用诸如深度学习的机器学习算法来实现上述学习。注意,学习单元122采用的学习算法不限于上述示例,并且可以适当地设计。
108.学习单元122将指示学习结果的数据(以下称为学习结果数据)提供给动作计划单元123,或者将该数据存储在存储单元106中。
109.动作计划单元123基于所识别或估计的状况和学习结果数据来计划要由自主移动体11执行的动作。动作计划单元123将指示所计划的动作的数据(以下称为动作计划数据)提供给操作控制单元124。此外,动作计划单元123将关于自主移动体11的动作的数据提供给学习单元122,或者将该数据登记在存储单元106中存储的动作历史数据中。
110.操作控制单元124通过基于动作计划数据控制驱动单元104和输出单元105来控制自主移动体11的操作以执行所计划的动作。操作控制单元124基于行动计划执行例如致动器71的旋转控制、显示器51的显示控制、利用扬声器的声音输出控制等。
111.基于操作控制单元124的控制,驱动单元104弯曲和伸展自主移动体11的多个关节单元。更具体地,驱动单元104基于操作控制单元124的控制来驱动包括在各个关节单元中的致动器71。
112.输出单元105包括例如显示器51、扬声器、触觉设备等,并且基于操作控制单元124的控制输出视觉信息、听觉信息、触觉信息等。
113.存储单元106包括例如非易失性存储器和易失性存储器,并且存储各种程序和数据。
114.《期望值计算单元151的配置示例》
115.图7示出了期望值计算单元151的配置示例,期望值计算单元151是由学习单元122和动作计划单元123实现的功能的一部分。
116.期望值计算单元151计算指示用户对自主移动体11执行预定动作的期望程度的期望值。期望值计算单元151包括促进期望值计算单元161、抑制期望值计算单元162、习惯期望值计算单元163和总期望值计算单元164。
117.促进期望值计算单元161基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来计算促进期望值。该促进期望值指示用户对自主移动体11执行预定动作的短期期望值。例如,当用户给出促进预定动作的指令时,促进期望值改变。促进期望值计算单元161将指示所计算的促进期望值的数据提供给总期望值计算单元164。
118.抑制期望值计算单元162基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来计算抑制期望值。抑制期望值指示自主移动体11抑制预
定动作的用户的短期期望值。例如,当用户给出抑制预定动作的指令时,抑制期望值改变。抑制期望值计算单元162将指示计算出的抑制期望值的数据提供给总期望值计算单元164。
119.习惯期望值计算单元163基于存储在存储单元106中的动作历史数据来计算习惯期望值。习惯期望值指示用户对于自主移动体11的预定动作的习惯期望值。习惯期望值计算单元163将指示所计算的习惯期望值的数据提供给总期望值计算单元164。
120.总期望值计算单元164基于促进期望值、抑制期望值和习惯期望值来计算作为最终期望值的总期望值。总期望值计算单元164将计算的总期望值提供给动作计算单元123。
121.动作计划单元123基于例如总期望值来计划自主移动体11的动作。
122.《信息处理终端12的功能配置示例》
123.接下来,参照图8将描述信息处理终端12的功能配置示例。信息处理终端12包括输入单元201、通信单元202、信息处理单元203、输出单元204和存储单元205。
124.输入单元201包括例如诸如开关和按钮的输入设备。此外,输入单元201包括各种传感器,例如相机、麦克风、惯性传感器等。输入单元201将经由输入设备输入的输入数据和从各种传感器输出的传感器数据提供给信息处理单元203。
125.通信单元202经由网络21或不经由网络21与自主移动体11、另一信息处理终端12和信息处理服务器13通信,并且发送和接收各种数据。通信单元202将接收到的数据提供给信息处理单元203,并且获取要从信息处理单元203发送的数据。
126.注意,通信单元202的通信方法没有特别限制,并且可以根据规范和操作灵活地改变。
127.信息处理单元203例如包括诸如cpu的处理器,执行各种类型的信息处理,并且控制信息处理终端12的每个单元。
128.输出单元204包括例如显示器、扬声器、触觉设备等,并且基于信息处理单元203的控制输出视觉信息、听觉信息、触觉信息等。
129.存储单元205例如包括非易失性存储器和易失性存储器,并且存储各种程序和数据。
130.注意,可以根据规范和操作灵活地改变信息处理终端12的功能配置。
131.《信息处理服务器13的功能配置示例》
132.随后,参照图9将描述信息处理服务器13的功能配置示例。信息处理服务器13包括通信单元301、信息处理单元302和存储单元303。
133.通信单元301经由网络21与每个自主移动体11和每个信息处理终端12通信,并且发送和接收各种数据。通信单元301将接收到的数据提供给信息处理单元302,并且获取要从信息处理单元302发送的数据。
134.注意,通信单元301的通信方法没有特别限制,并且可以根据规范和操作灵活地改变。
135.信息处理单元302例如包括诸如cpu的处理器,执行各种类型的信息处理,并且控制信息处理终端12的每个单元。信息处理单元302包括自主移动体控制单元321和应用控制单元322。
136.自主移动体控制单元321具有与自主移动体11的信息处理单元103类似的配置。具体地,信息处理单元103包括识别单元331、学习单元332、动作计划单元333和操作控制单元
334。
137.然后,自主移动体控制单元321具有与自主移动体11的信息处理单元103类似的功能。例如,自主移动体控制单元321从自主移动体11接收传感器数据、输入数据等以及动作历史数据等,并且识别自主移动体11及其周围环境的状况。例如,自主移动体控制单元321基于自主移动体11的状况和周围环境生成用于控制自主移动体11的操作的控制数据,并且将控制数据发送到自主移动体11以控制自主移动体11的操作。例如,与自主移动体11类似,自主移动体控制单元321执行模式识别学习和对应于用户的规定的动作模式的学习。
138.注意,自主移动体控制单元321的学习单元332还可以通过基于从多个自主移动体11收集的数据执行模式识别学习和对应于用户的规定的动作模式的学习来执行多个自主移动体11共有的集体知识的学习。
139.应用控制单元322经由通信单元301与自主移动体11和信息处理终端12通信,并且控制由信息处理终端12执行的应用。
140.例如,应用控制单元322经由通信单元301从自主移动体11收集关于自主移动体11的各种数据。然后,应用控制单元322经由通信单元301将收集的数据发送到信息处理终端12,从而使由信息处理终端12执行的应用显示关于自主移动体11的数据。
141.例如,应用控制单元322经由通信单元301从信息处理终端12接收指示经由应用输入到自主移动体11的指令的数据。然后,应用控制单元322通过经由通信单元301向自主移动体11发送所接收的数据来向自主移动体11给出来自用户的指令。
142.存储单元303包括例如非易失性存储器和易失性存储器,并且存储各种程序和数据。
143.注意,可以根据规范和操作灵活地改变信息处理服务器13的功能配置。
144.《信息处理系统1的处理》
145.接下来,参照图10至图25将描述信息处理系统1的处理。
146.《模式识别学习处理》
147.首先,参照图10至图16将描述由信息处理系统1执行的模式识别学习处理。
148.在下文中,将描述由自主移动体11的学习单元122执行模式识别学习的情况作为主要示例。注意,模式识别学习可以由例如信息处理服务器13的学习单元323执行,或者可以由学习单元122和学习单元323独立地或协作地执行。
149.首先,将参照图10描述基于教学的模式识别学习的概要。注意,图10示出了由用户执行教学的示例。
150.例如,如图10的a所示,通过诸如由用户指示的姿势或话语来执行该教学。在该示例的情况下,用户通过手指uh指示对象o1是“真空吸尘器”,并且通过话语uo向自主移动体11教学对象o1是“真空吸尘器”。
151.此时,识别单元121首先基于诸如“记住”的用户话语,指示通过教学学习的开始的用户姿势,或诸如用户手指突然折断的声音来检测教学的开始。此外,此时,操作控制单元124可以使自主移动体11执行指示开始基于教学的学习的操作。例如,操作控制单元124可以使自主移动体11吠叫、抬起耳朵或尾巴,或者改变由显示器51表示的虹膜的颜色。此外,在自主移动体11通过使用语言与用户通信的情况下,还可以使输出单元105输出语音以达到公开学习的效果。
等,如图11的b所示。
168.此外,模式识别学习可以包括例如空间区域识别学习。即,学习目标可以是任何空间区域。此处,空间区域可以是空间中的任何预定区域(地点)。注意,空间区域不一定必须是与其他空间区域物理分离的封闭空间。空间区域可以是例如“房屋”或“房屋”的“第一楼层”。此外,空间区域可以是“第一楼层”上的“起居室”或“起居室”中的“沙发附近”。
169.图12是示出基于教学的空间区域识别学习的概要的图。在图12所示的示例中,示出了用户向自主移动体11教学作为“入口”的空间区域d1的情况。
170.具体地,如图12的a所示,用户执行话语uo,该话语uo教学自主移动体11所位于的空间区域d1是“入口”。
171.此时,识别单元121可以通过识别uo中包括的短语“此处”来检测正在执行与空间区域d1相关的教学。此外,识别单元121可以基于由用户发出的诸如“记住地点”的话语来检测与空间区域识别相关的教学。
172.随后,识别单元121基于用户的话语uo指定自主移动体11当前所处的空间区域d1作为学习目标。此外,操作控制单元124使输入单元101捕获由识别单元121指定为学习目标的空间区域的图像。
173.此外,识别单元121通过对用户的话语uo执行形态分析来提取用作标签的名词短语“入口”。
174.随后,学习单元122将如上所述提取的标签与学习目标的捕获图像相关联以获得学习数据,并执行与“入口”相关的空间区域识别学习。
175.如上所述,根据自主移动体11,除了对象和运动之外,还可以自动收集与各种空间区域相关的学习数据,并且基于学习数据执行空间区域识别学习。
176.注意,在上文中,作为示例描述了将空间区域的图像用作学习数据的情况;然而,作为要学习的空间区域的特征,学习单元122可以使用例如在空间区域d1中被跟踪的用户经常消失(即外出)的事实,或者诸如“我在家”和“再见”的话语经常在空间区域d1中被检测到的事实。
177.根据自主移动体11的上述功能,通过重复执行基于教学的学习,或者使用信息处理服务器13所学习的集体知识,可以将与空间区域d1的喜好不同的空间区域d2识别为“入口”,如图12的b所示。
178.此处,如上所述,操作控制单元124具有使输入单元101捕获由识别单元121指定的学习目标的图像的功能。
179.此时,操作控制单元124可以控制输入单元101和驱动单元104,使得以高精度和高效率执行模式识别。例如,操作控制单元124可以改变自主移动体11的位置和姿势,使得通过控制驱动单元104来正确地捕获整个指定对象的图像。
180.因此,可以基于在距学习目标适当距离处捕获的图像来执行有效的模式识别学习。
181.此外,操作控制单元124可以控制驱动单元104和输入单元101,使得从多个角度捕获由识别单元121指定的学习目标的图像。
182.因此,与基于学习目标的一个方面的图像执行学习的情况相比,可以从各种角度提取学习目标的特征,并且可以获得具有高通用性的学习效果。
183.此外,例如,可以通过诸如附加到学习目标的qr码(注册商标)的标记来实现该教学。图13是用于说明使用标记的教学的图。
184.例如,图13的a示出了如下示例,其中与对象识别学习相关的教学利用附着到作为“真空吸尘器”的对象o1的标记m1来实现。在这种情况下,识别单元121可以基于由输入单元101捕获的标记m1的图像来获取标签“真空吸尘器”。
185.此外,图13的b示出了如下示例,其中与空间区域识别学习相关的教学是利用附着到安装在作为“入口”的空间区域d1中的门上的标记m2来实现的。同样在这种情况下,识别单元121可以基于由输入单元101捕获的标记m2的图像来获取标签“入口”。
186.如上所述,通过使用标记,可以实现与对象、空间区域等相关的教学,而不是用户的明确教学,并且可以自动增强自主移动体11的识别能力
187.此外,例如,可以基于通过无线通信从学习目标发送的信息来执行教学。图14是用于说明使用无线通信的教学的图。
188.在图14所示的示例的情况下,作为“真空吸尘器”的对象o1通过无线通信将标签“真空吸尘器”以及对象o1的图像i3a和图像i3b发送到自主移动体11。此时,学习单元122可以基于接收到的标签“真空吸尘器”、图像i3a和图像i3b来执行与对象o1相关的对象识别学习。
189.根据如上所述的使用无线通信的教学,例如,如图所示,即使作为学习目标的对象o3被存储在壁橱中并且对象o3的图像不能被捕获,通过将预先准备的图像与标签一起发送到自主移动体11,自主移动体11也可以执行与对象o3相关的对象识别学习。
190.对于无线通信,例如,使用近场通信(nfc)、蓝牙(注册商标)、射频识别(rfid)、信标等。
191.此外,例如,可以通过诸如由学习目标发射的超声波的听不见的声音来实现该教学。图15是用于说明使用听不见的声音的教学的图。
192.在图15所示的示例中,示出了作为“洗衣机”的对象o5在操作期间发出预定的听不见的声音的示例,由此实现了该教学。例如,图15的a示出了基于由对象o5“在脱水期间”发出的听不见的声音nas1识别单元121检测到对象o5是“洗衣机”并且对象o5是“在脱水期间”的情况的示例。
193.例如,图15的b示出了基于由对象o5“在干燥期间”发出的听不见的声音nas2识别单元121检测到对象o5是“洗衣机”并且对象o5是“在干燥期间”的情况的示例。
194.如上所述,根据使用听不见的声音的教学,不仅可以教学对象的名称,而且可以教学操作状态等。此外,根据使用听不见的声音的教学,例如,学习单元122还可以与对象o5的操作状态一起学习听得见的声音as1和听得见的声音as2,听得见的声音as1是由对象o5“在脱水期间”发出的操作声音,听得见的声音as2是由对象o5“在干燥期间”发出的操作声音。通过重复执行如上所述的学习,自主移动体11即使对于不发出听不见的声音的对象也可以逐渐获得识别能力。
195.接下来,将描述标签与学习目标之间的关联的校正。如上所述,自主移动体11可以基于各种类型的教学执行模式识别学习。
196.然而,例如,当基于用户的教学执行学习时,假设错误地获取学习目标或标签的情况。为此,信息处理服务器13的应用控制单元322可以向信息处理终端12提供用于用户(或
开发者或服务提供者)校正标签与学习目标之间的关联的用户界面。
197.此外,学习结果的校正可以由自主移动体11自动执行。例如,通过将信息处理服务器13中累积的学习结果与自主移动体11的学习结果进行比较,学习单元122还可以检测自主移动体11的集体知识与学习知识之间的差异,并且自动校正标签和学习目标。
198.此外,例如,操作控制单元124可以使自主移动体11执行引导操作,用于引导用户的教学以更有效地收集学习数据。
199.例如,在识别单元121检测到在自主移动体11的自主动作期间不能识别的未知对象的情况下,操作控制单元124可以使自主移动体11执行用于引导用户对未知对象的教学的引导操作。例如,操作控制单元124使自主移动体11执行对未知对象的吠叫操作作为引导操作。
200.如上所述,通过引导操作,可以增加用户针对自主移动体11的动作对未知对象执行教学的可能性,并且可以期望更有效地收集学习数据的效果。
201.注意,引导操作的示例包括各种操作,诸如吠叫、嗅闻、吓人、倾斜头部、交替地看着用户和目标、以及恐惧。
202.接下来,将参照图16的流程图描述上述自主移动体11的模式识别学习处理的流程。
203.在步骤s1中,识别单元121检测教学的开始。识别单元121基于例如用户的话语、qr码(注册商标)的检测,通过无线通信的信息接收、听不见的声音的检测等来检测教学的开始。
204.在步骤s2中,操作控制单元124执行学习开始的通知。例如,操作控制单元124使自主移动体11执行指示模式识别学习开始的操作。例如,操作控制单元124使自主移动体11执行诸如吠叫、移动耳朵和尾巴以及改变虹膜颜色的操作。
205.在步骤s3中,识别单元121指定学习目标。识别单元121可以基于例如由用户指示的姿势来指定学习目标,或者可以基于从学习目标获取的信息来指定学习目标。
206.在步骤s4中,识别单元121获取标签。例如,识别单元121可以从用户的话语中提取标签,或者可以从从学习目标获取的信息中获取标签。
207.在步骤s5中,操作控制单元124控制驱动单元104,使得获得能够捕获在步骤s3中指定的整个学习目标的图像的位置和姿势。
208.在步骤s6中,操作控制单元124控制驱动单元104和输入单元101,使得从多个角度捕获学习目标的图像。
209.在步骤s7中,学习单元122基于在步骤s4的处理中获取的标签和在步骤s6的处理中捕获的图像来执行模式识别学习。
210.在步骤s8中,操作控制单元124执行学习完成的通知。例如,操作控制单元124使自主移动体11执行指示模式识别学习完成的操作。该操作可以是例如吠叫、移动耳朵或尾巴、改变虹膜的颜色等。
211.此后,模式识别学习处理结束。
212.如上所述,自主移动体11可以通过执行模式识别学习来提高识别对象、运动、空间区域等的识别能力。
213.《对自主移动体11的规定响应处理》
214.接下来,参照图17至图25将描述由信息处理系统执行的规定响应处理。
215.规定响应处理是自主移动体11响应于用户的规定而改变其动作的处理。
216.此处,作为在规定响应处理中要由自主移动体11识别或存储的目标,例如,假设上述其中放置自主移动体11的状况。注意,将由自主移动体11识别或存储的人假设为例如自主移动体11的用户、另一自主移动体11的用户、陌生人等。自主移动体11的用户包括例如自主移动体11的所有者、所有者的家人、亲属等。此外,诸如要由自主移动体11识别或存储的目标的自主移动体不仅包括与自主移动体11相同类型的自主移动体,还包括其他类型的自主移动体。
217.关于如何对自主移动体11进行规定,例如,假设如下方法,其中用户通过语音或姿势给出指令;通过使用信息处理终端12上的应用给出指令,触摸自主移动体11;或给出食物。此外,例如,假设如下方法,其中使用图像、语音等使自主移动体11从包括在自主移动体11的输入单元101中的各种传感器识别上述目标、用户指令等。
218.作为自主移动体11按照规定改变的处理,例如,假设其中自主移动体11的改变由一个规定完成的处理,自主移动体11通过类似规定的重复而逐渐改变,或者自主移动体11按照根据预定过程执行的规定逐步改变。
219.作为自主移动体11的改变模式,假设:例如行为改变;获取预定动作;改进预定动作(在预定动作中提高熟练度)或停止预定动作。
220.作为表达自主移动体11的改变的方法,除了其中自主移动体改变动作的方法之外,例如,假设在信息处理终端12上的应用中显示指示自主移动体11的改变的信息的方法。
221.注意,在下文中,将描述由自主移动体11的学习单元122执行规定响应处理的情况作为主要示例。注意,可以由例如信息处理服务器13的学习单元323执行规定响应处理,或者可以由学习单元122和学习单元323独立地或协作地执行。
222.此外,虽然省略了详细的描述,但是在规定响应处理中根据需要适当地执行上述模式识别学习。
223.《对自主移动体11进行规定的第一方法》
224.首先,参照图17至图20将描述对自主移动体11进行规定的第一方法。
225.在第一方法中,用户给出促进或抑制预定动作的指令,由此使自主移动体11有规律。
226.注意,只要自主移动体11能够识别用户的指令,则不特别限制用户给出指令的方法。在下文中,将主要利用用户通过语音向自主移动体11给出指令的示例进行描述。
227.此外,在下文中,作为具体示例,将描述当用户希望自主移动体11安静时自主移动体11被规律为安静地表现的情况。
228.《动作控制处理的第一实施方式》
229.此处,将参照图17的流程图描述由自主移动体11执行的动作控制处理的第一实施方式。
230.该处理例如在自主移动体11的电源接通时开始,在自主移动体11的电源断开时结束。
231.在步骤s101中,识别单元121确定是否从用户给出了指令。具体地,识别单元121基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来执
行识别用户指令的处理。在识别单元121没有识别用户的指令的情况下,识别单元121确定没有给出来自用户的指令,并且处理进行到步骤s102。
232.在步骤s102中,识别单元121确定是否为开始动作的状况。例如,识别单元121基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来识别当前状况。
233.此外,识别单元121从存储单元106读取通过学习在稍后描述的步骤s110的处理中的每个动作与每个状况之间的相关性而获得的动作状况相关性数据。
234.动作状况相关数据是学习结果数据之一,并且是指示每个动作与应当执行每个动作的状况(以下称为动作触发状况)之间的相关性的数据。例如,动作状况相关性数据指示用户给出指令的状况与给出指令的动作之间的相关性。
235.可以任意设置动作触发状况的内容。例如,动作触发状况包括应当采取动作的时间、时区、星期几、地点、用户状态、自主移动体11的状态、自主移动体11周围的状况等的若干项。
236.此外,包括在动作触发状况中的项目的类型可以根据相应动作的细节而不同。例如,在动作内容是“安静”的情况下的动作触发状况由自主移动体11周围的状况表示,而在动作内容是“睡眠”的情况下的动作触发状况由时间表示。
237.在动作状况相关数据中没有类似于当前状况的动作触发状况的情况下,识别单元121确定不是开始动作的状况,并且处理返回到步骤s101。
238.此后,重复执行步骤s101和步骤s102的处理,直到在步骤s101中确定从用户给出了指令,或者在步骤s102中确定是开始动作的状况。
239.另一方面,在步骤s101中,在识别单元121识别用户的指令的情况下,识别单元121确定该指令是从用户给出的,并且处理进行到步骤s103。
240.例如,在识别单元121识别出提示自主移动体11要安静的用户的语音(例如“安静”、“关机”或“嘈杂的”)的情况下,识别单元121确定该指令是从用户给出的,并且处理进行到步骤s103。
241.在步骤s103中,识别单元121基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来识别当前状况。即,识别单元121识别当从用户给出指令时的状况。要识别的状况的内容包括例如当给出指令时的时间、时区、星期几、地点、用户的状态、自主移动体11的状态、自主移动体11周围的状况等中的一些。
242.识别单元121向动作计划单元123提供指示用户的指令内容的数据。此外,识别单元121向学习单元122提供指示用户的指令的内容和给出指令时的状况的数据。
243.在步骤s104中,动作计划单元123根据用户的指令基于过去采取的动作的次数来设置动作内容。
244.具体地,动作计划单元123基于存储在存储单元106中的动作历史数据,根据类似内容的指令指定过去采取的动作次数(在下文中,称为指令动作次数)。注意,指令动作的次数例如是给出指令的动作被执行到结束并且完成的次数,并且不包括给出指令的动作在中间停止并且未完成的次数。
245.动作计划单元123基于指令动作的指定次数来设置动作内容。例如,动作计划单元123设置动作内容,使得当指令动作的次数增加时,可以表示对给出指令的动作熟练的状
态。
246.具体地,在指令动作的次数是0次的情况下,例如,在过去没有指示自主移动体11安静并且这次第一次指示自主移动体11安静的情况下,动作内容被设置为以不安静的状态坐1分钟的模式。
247.例如,在指令动作的次数为1次至10次的情况下,将动作内容设置为以指令动作的次数
×
1分钟坐并且然后以不安静的状态坐1分钟的模式。
248.例如,在指令动作的次数是11次至20次的情况下,动作内容被设置为:坐10分钟、躺下(指令动作的次数-10)
×
1分钟并且然后以不安静的状态坐1分钟的模式。
249.例如,在指令动作的次数是21次至30次的情况下,动作内容被设置为:坐10分钟、躺下10分钟、睡(指令动作的次数-20)
×
1分钟并且然后以不安静的状态坐1分钟的模式。
250.例如,在指令动作的次数是31次或更多的情况下,动作内容被设置为:坐10分钟、躺10分钟、睡10分钟并且然后以不安静的状态坐1分钟的模式。
251.当预定动作的指令以这种方式被重复时,预定动作的内容改变。在该示例的情况下,随着指令动作次数的增加,自主移动体11的安静动作(以下称为无声动作)的熟练程度提高。即,自主移动体11能够安静地站立的时间变得更长。因此,用户可以感觉到自主移动体11的成长。
252.动作计划单元123将指示所设置的动作内容的数据提供给操作控制单元124。
253.此后,处理进行到步骤s106。
254.另一方面,在步骤s102中,在动作状况相关数据中存在与当前状况类似的动作触发状况的情况下,识别单元121确定是开始动作的状况,并且处理进行到步骤s105。
255.例如,在过去当用户坐在桌子前时重复地向自主移动体11给出要安静的指令的情况下,用户坐在在桌子前的状况与无声动作相关联,作为动作触发状况。在这种情况下,在用户当前坐在桌子前的情况下,确定是开始动作的状况,并且处理进行到步骤s105。
256.例如,在过去在相同的时区向自主移动主体11重复地给出要安静的指令的情况下,该时区与该无声动作相关联,作为动作触发状况。在这种情况下,在当前时间包括在该时区中的情况下,确定是开始动作的状况,并且处理进行到步骤s105。
257.在步骤s105中,自主移动体11基于当前状况设置动作内容。
258.具体地,识别单元121将被确定为与当前状况类似的动作触发状况通知给动作计划单元123。此外,识别单元121将指示所识别的当前状况的数据提供给学习单元122。
259.动作计划单元123基于执行通知的动作触发状况和存储在存储单元106中的动作状况相关数据来设置动作内容。即,与在动作状况相关数据中执行通知的动作触发状况相关联的动作内容被设置为要由自主移动体11执行的动作内容。动作计划单元123将指示所设置的动作内容的数据提供给操作控制单元124。
260.此后,处理进行到步骤s106。
261.在步骤s106中,自主移动体11开始动作。具体地,动作控制单元124开始控制驱动单元104和输出单元105以执行所设置的动作内容的处理。
262.在步骤s107中,操作控制单元124确定动作是否完成。在步骤s104或步骤s105的处理中设置的动作仍在执行的情况下,操作控制单元124确定动作尚未完成,并且处理进行到步骤s108。
263.在步骤s108中,动作计划单元123确定是否停止动作。例如,识别单元121基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据,执行识别用户的指令的处理。然后,在识别单元121没有识别出触发停止当前正在执行的动作的指令的情况下,动作计划单元123确定不停止动作,并且处理返回到步骤s107。
264.此后,重复执行步骤s107和步骤s108的处理,直到在步骤s107中确定动作完成,或者在步骤s108中确定停止动作。
265.另一方面,在步骤s107中确定动作完成的情况下,处理进行到步骤s110。
266.此外,在步骤s108中,例如,在识别出触发以停止当前正在执行的动作的指令的情况下,识别单元121通知动作计划单元123识别出触发以停止当前正在执行的动作的指令。然后,动作计划单元123确定停止动作,并且处理进行到步骤s110。
267.作为触发以停止动作的指令,例如,假设用于抑制正在执行的动作的指令、用于与正在执行的动作不同的另一动作的指令等。
268.例如,在自动移动体11正在执行无声动作的情况下,在用户呼叫自动移动体11的名称或给出诸如“来这里”或“你可以移动”的指令的情况下,确定停止该动作,并且处理进行到步骤s110。
269.在步骤s110中,自主移动体11停止动作。具体地,识别单元121将指示触发停止动作的指令的内容的数据提供给动作计划单元123。动作计划单元123指示操作控制单元124停止动作。操作控制单元124控制驱动单元104和输出单元105,以使自主移动体11停止当前正在执行的动作。
270.此后,该处理进行到步骤s110。
271.在步骤s110中,学习单元122学习动作与状况之间的相关性。
272.具体地,动作计划单元123将执行的动作内容和指示动作是否完成的数据提供给学习单元122。
273.学习单元122将该时间的动作结果添加到存储在存储单元106中的动作历史数据。
274.此外,学习单元122通过基于动作历史数据学习每个动作与状况之间的相关性来更新动作状况相关性数据。例如,学习单元122计算每个动作与每个状况之间的相关度(例如,相关系数)。
275.注意,例如,在某个动作完成的情况下,使动作与执行动作时的状况之间的相关度较大。另一方面,例如,在某个动作在中间停止的情况下,使动作与执行动作时的状况之间的相关度较小。
276.然后,学习单元122将相关度大于或等于预定阈值的状况与每个动作相关联,作为动作触发状况。
277.因此,例如,在用户过去在类似状况下重复给出类似指令的情况下,该状况与对应于该指令的动作相关联,作为动作触发状况。
278.例如,在用户坐在桌子前的状况下,在用户重复地向自主移动体11给出指令“安静”的情况下,用户坐在桌子前的状况与无声动作相关联,作为触发状况。
279.例如,在用户在类似的时区中重复地向自主移动体11给出指令“安静”的情况下,该时区与该无声动作相关联,作为触发状况。
280.另一方面,动作触发状况不与不存在相关度大于或等于阈值的状况的动作相关
联。
281.学习单元122将更新的动作状况相关数据存储在存储单元106中。
282.此后,处理返回到步骤s101,并且执行步骤s101之后的处理。
283.如上所述,用户可以体验对自主移动体11的规定(discipline)。因此,例如,用户可以感觉到自主移动体11由于用户的规定而成长,并且改善了用户体验。
284.此外,自主移动体11能够通过学习从用户给出指令时的状况而在没有用户的指令的适当状况下自主地执行适当动作。
285.注意,例如,自主移动体11可以基于从用户给出指令的时间分布等来估计给出指令的动作的用户的期望值的时间序列转换,并且可以基于所估计的期望值来改变动作。
286.此处,参照图18至图20,将描述基于用户的期望值改变自主移动体11的动作的处理的具体示例。
287.注意,在下文中,将描述自主移动体11根据用户的指令执行无声动作的情况的示例。此外,下面描述的期望值计算处理由图7的期望值计算单元151执行。
288.图18示出了自主移动体11的无声动作、促进期望值、抑制期望值和习惯期望值的时间序列变化的示例。
289.在时刻t1处,用户给出无声动作的指令。例如,用户呼叫自主移动体11“安静”。因此,自主移动体11开始无声动作。此外,促进预期值从0上升到1.0并保持直到时间t3。
290.在时刻t2处,自主移动体11结束无声动作。另外,如上所述,时刻t1与时刻t2之间的无声动作期间的长度根据过去的无声动作的指令动作的次数而变化。
291.在时刻t3处,促进期望值开始降低。促进期望值线性降低。
292.另外,时刻t1与时刻t3之间的长度(即,将促进期望值保持为1.0的期间的时间段的长度)可以是恒定的,也可以根据过去的无声动作的指令行动的次数而变化。在后一种情况下,当用于无声动作的指令动作的次数增加时,周期变得更长。
293.在时刻t4处,促进期望值达到0.5,并且然后降低到0。
294.在时刻t5处,用户给出如在时刻t1处的无声动作的指令。因此,自主移动体11开始无声动作,促进期望值从0上升到1.0,并且保持到时刻t7。
295.在时刻t6处,自主移动体11如在时刻t2处一样结束无声动作。
296.在时刻t7处,促进期望值如时刻t3处一样开始降低。
297.在时刻t8处,用户给出抑制无声动作的指令。例如,用户呼叫自主移动体11的名称。因此,抑制期望值从0上升到1.0,并且然后开始下降。抑制期望值线性减小。
298.在时刻t9处,促进期望值达到0.5,并且然后在时刻t4处降低到0。
299.在时刻t10处,抑制期望值达到0.5,并且然后降低到0。
300.注意,习惯期望值基于通过后面描述的方法计算的结果而改变。
301.图19是用于说明在如图18所示促进期望值、抑制期望值和习惯期望值变化的情况下计算总期望值的方法的图。
302.在时刻t1处,从用户给出的无声动作的指令用作促进触发,并且总期望值1是有效的。注意,总期望值1被设置为促进期望值和习惯期望值中的较大值。
303.在时刻t5处,从用户给出的无声动作的指令用作促进触发。然而,由于总期望值1已经在时刻t1有效,所以总期望值1保持有效。
304.在时刻t7处,用于抑制从用户给出的无声动作的指令用作抑制触发,总期望值1无效,而总期望值2有效。总期望值2被设置为(1.0-抑制期望值)和习惯期望值中的较小值。
305.因此,在从时刻t1到时刻t7的期间,自主移动体11基于总期望值1而行动。例如,在总期望值1大于或等于预定阈值的情况下,自主移动体11执行类似于无声动作的动作,并且除了执行无声动作的时段(从时刻t1到时刻t2的时段,以及从时刻t5到时刻t6的时段)之外尽可能安静地操作。例如,自主移动体11限制行走速度,并且安静地行走。此外,例如,自主移动体11优先执行安静操作,并且尽量不执行噪声操作。安静操作例如是仅操作前腿和颈部而不移动的操作。噪声操作例如是四处走动或歌唱。另一方面,在总期望值1小于预定阈值的情况下,自主移动体11执行正常操作。
306.因此,例如,即使在完成无声动作之后,自主移动体11也可以安静地操作一段时间,并且用户可以感觉到无声动作的余辉。
307.此外,在时刻t7之后的时段中,自主移动体11基于总期望值2而行动。例如,在总预期值2大于或等于预定阈值的情况下,自主移动体11优先执行安静操作。另一方面,在总预期值2小于预定阈值的情况下,自主移动体11执行正常操作。
308.注意,关于促进触发和抑制触发,最新的触发总是有效的。然后,如上所述,在促进触发有效期间,总期望值1有效,并且在抑制触发有效期间,总期望值2有效。
309.此处,将参照图20描述计算习惯期望值的方法的示例。
310.图20的顶部图示出了在前一预定时段(例如,三个月)内每个预定时区的无声动作的激活次数的直方图。在每个时区中甚至每天激活一次无声动作的情况下,添加一个直方图值。即,在无声动作在同一天的同一时区中被激活即使一次的情况下,不管激活的次数如何都添加一个直方图值。因此,例如,在直方图值为5的情况下,它指示在预定时段内的5天内,在时区中激活无声动作。
311.注意,不管用户指令的存在与否,某个动作的激活意味着自主移动体11开始动作,并且动作是否完成无关紧要。
312.图20的第二图示出了在与顶部图相同的时段内每个预定时区的所有动作(包括无声动作)的激活次数的直方图。例如,在每个时区中甚至每天一次激活任何动作的情况下,添加一个直方图值。即,在任何动作在同一天的同一时区中被激活甚至一次的情况下,不管被激活的动作的次数和类型如何,都添加一个直方图值。因此,例如,在直方图值为65的情况下,它指示在预定时段内的65天内,某个动作在时区中被激活。
313.然后,通过下面的等式(1)计算每个时区t中的无声动作激活率v(t)。
314.v(t)=s(t)/a(t)
ꢀꢀꢀꢀ
(1)
315.在时区t中无声动作激活的次数由s(t)表示,并且在时区t中所有动作激活的次数由a(t)表示。
316.然后,通过下面的等式(2)计算通过归一化无声动作激活率v(t)获得的归一化无声动作激活率vn(t)。
317.vn(t)=k
×
(((v(t)-μ)/σ)/2+0.5)
ꢀꢀꢀꢀ
(2)
318.所有时区中的无声动作激活次数s(t)的平均值由μ表示,并且所有时区中的无声动作激活次数s(t)的方差由σ表示。
319.例如,k表示系数,并且设置如下。注意,在下文中,无声动作激活的总次数s(t)被
定义为σs(t),并且所有动作激活a(t)的总次数被定义为σa(t)。
320.例如,在σa(t)小于预定阈值min_count的情况下,即,在自主移动体11的动作的激活次数非常小的情况下,系数k被设置为0。
321.另一方面,在σa(t)大于或等于阈值min_count的情况下,当比率(=σs(t)/σa(t))大于或等于预定阈值max_ratio时,k被设置为1。另一方面,在比率小于阈值max_ratio的情况下,k被设置为比率/max_ratio。即,系数k随着无声动作的激活次数与所有动作的激活次数的比率增加而增加。
322.图20的底部图示出了归一化无声动作激活率的图。
323.然后,将在归一化无声动作激活率小于0的情况下校正为0之后的归一化无声动作激活率,或者在归一化无声动作激活率大于或等于1的情况下校正为1之后的归一化无声动作激活率用作习惯期望值。
324.通过使用习惯期望值,即使用户没有给出指令,当用户的期望在日常基础上很高时,自主移动体11也可以执行用户期望的动作(例如,安静地行动)。
325.注意,通过上述处理,可以规定自主移动体11执行除无声动作之外的各种动作。
326.例如,用户重复(例如,每天)说(给出指令)“晚安”,由此自主移动体11对睡眠动作熟练。此处,睡眠动作例如是其中自主移动体11移动到充电支架并在充电支架上转换到待机模式的动作。
327.例如,即使用户一开始说“晚安”,自主移动体11也不易于开始睡眠动作,而是在每天重复讲话之后立即开始睡眠动作。此外,自主移动体11安静地移动(例如,悄悄地行走)到充电支架。
328.此外,用户在相同的时区中重复说“晚安”,由此自主移动体11开始记住该时区并在该时区中自动开始睡眠动作。
329.此外,例如,用户重复说“晚安直到早上”,由此自主移动体11根据用户的指令继续待机模式直到早上。
330.此外,例如,用户重复地(例如,每天)说(给出指令)“早上好”,由此自主移动体11对唤醒动作熟练。此处,唤醒动作是例如其中自主移动体11从其中自主移动体11在充电支架上处于待机模式的状态被激活并开始移动的动作。
331.例如,在开始时,自主移动体11即使用户说“早上好”也不容易起床,而是在每天重复说话之后立即起床。
332.此外,用户在相同的时区中重复说“早上好”,自主移动体11开始记住时区并在时区中自动醒来。
333.此外,例如,用户在回家时重复说(给出指令)“我回家了”,由此自主移动体11对欢迎用户的动作熟练。此处,欢迎动作例如是自主移动体11移动到入口并欢迎用户的动作。
334.例如,在开始时,即使用户打开入口并说“我回家了”,自主移动体11也不会非常频繁地移动到入口,而是在每天重复讲话之后,当用户打开入口并讲话“我回家了”时,自主移动体11移动到入口并欢迎用户。此外,例如,自主移动体11开始记住用户的返回时间,并且当用户的返回时间到来时自动移动到入口并等待用户返回家。
335.此外,例如,在自主移动体11将要开始进食的操作的情况下,用户重复地给出“等待”的指令,由此自主移动体11能够在不进食的情况下等待。此外,例如,当自主移动主体11
对食物执行“等待”时,用户重复地给出“你可以吃”的指示,由此自主移动主体11能够对食物执行“等待”,直到用户给出许可。
336.通过类似的方法,例如,自主移动体11可以被规定为“坐”等。
337.此外,通过类似的方法,例如,用户可以通过重复地向自主移动体11给出抑制预定动作的指令来规定自主移动体11以抑制预定动作。例如,在上述示例中,用户可以通过给出诸如“不能吵闹”而不是“安静”的否定指令来规定自主移动体11的无声动作。
338.《规定自主移动体11的第二方法》
339.接下来,将参照图21至图24描述规定自主移动体11的第二方法。
340.在第二方法中,在自主移动体11执行预定动作的地点执行规定。
341.在下文中,作为具体示例,将描述对自主移动体11排尿的地点执行规定的示例。
342.《动作控制处理的第二实施方式》
343.此处,将参照图21的流程图描述由自主移动体11执行的动作控制处理的第二实施方式。
344.该处理例如在自主移动体11的电源接通时开始,在自主移动体11的电源断开时结束。
345.在步骤s201中,自主移动体11基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来确定是否满足用于执行动作的条件。重复执行该确定处理直到确定满足用于执行动作的条件,并且在确定满足用于执行动作的条件的情况下,处理进行到步骤s202。
346.例如,在识别单元121识别出用户的诸如“小便”的指令的情况下,识别单元121确定满足动作(排尿)的条件,并且处理进行到步骤s202。此外,例如,在稍后描述的排尿意图系数大于或等于预定阈值的情况下,动作计划单元123确定满足动作(排尿)条件,并且处理进行到步骤s202。
347.在步骤s202中,识别单元121基于从输入单元101提供的传感器数据和输入数据以及从通信单元102提供的接收数据来确定是否指示了行动地点。在确定指示了行动地点的情况下,处理进行到步骤s203。
348.注意,指示行动地点的方法没有特别限制。例如,用户可以通过将自主移动体11移动到排尿地点然后说出单词以指示排尿地点来指示排尿地点,例如“卫生间在这里”。例如,用户可以通过说出单词来指示排尿的地点以指示排尿和排尿的地点,例如“在房间的角落小便”。例如,用户可以通过使用信息处理终端12在地图上指示预定位置来指示排尿的地点。
349.此外,例如,用户可以指示动作方向(例如,“右方向”、“进入方向”等)而不是特定地点。此外,例如,用户可以指示动作的方向和特定位置。此外,例如,用户可以通过呼叫自主移动体11到用户所在的地点来指示行动的地点。
350.在步骤s203中,自主移动体11执行动作地点学习处理。
351.此处,将参照图22的流程图描述动作地点学习处理的细节。
352.在步骤s221中,自主移动体11对所指示的动作地点执行聚类。具体地,识别单元121将指示动作内容和所指示的动作地点(以下称为指示地点)的数据提供给学习单元122。
353.学习单元122将包括动作内容和该时间的指示地点的数据添加到存储在存储单元
106中的动作历史数据。
354.此外,学习单元122从动作历史数据中读取与该时间的动作内容相似的动作内容的数据中的最近n个数据(包括该时间的数据)。
355.然后,学习单元122通过使用例如诸如k-means方法的聚类方法来执行对所读取的数据中指示的指示地点的聚类。
356.图23示出了对指示地点的聚类的具体示例。在该示例中,将指示地点pa1至指示地点pa3分类为簇pb1,将指示地点pa4至指示地点pa8分类为簇pb2。这样,指示地点pa1到指示地点pa3被分组为一个动作地点pb1,并且指示地点pa4到指示地点pa8被分组为一个动作地点pb2。
357.在步骤s222中,学习单元122计算每个动作地点的确定程度。例如,学习单元122基于每个动作地点中包括的指示地点的数目来计算每个动作地点的确定程度。例如,在图22的示例中,由于动作地点pb2包含比动作地点pba更多的指示地点,所以将确定程度设置得较高。
358.学习单元122基于此时的学习结果更新作为学习结果数据之一并存储在存储单元106中的动作地点数据。
359.注意,动作地点数据包括例如每个动作内容以及与每个动作内容相对应的动作地点和确定程度。
360.如上所述,执行预定动作的动作地点和每个动作地点的确定程度是基于过去的指示地点的分布来设置的。
361.此后,动作地点学习处理结束。
362.返回图21,另一方面,在步骤s202中确定未指示行动地点的情况下,跳过步骤s203的处理,并且处理进行到步骤s204。
363.在步骤s204中,动作计划单元123设置动作地点。
364.例如,在由用户指示要行动的地点的情况下,动作计划单元123将指示地点确定为动作地点。
365.另一方面,在用户没有指示行动地点的情况下,动作计划单元123基于自主移动体11的当前位置和存储在存储单元106中的动作地点数据来确定动作地点。
366.具体地,例如,在没有学习到与该时间的动作内容相对应的动作地点并且没有设置动作地点的情况下,动作计划单元123将自主移动体11的当前位置确定为动作地点。
367.另一方面,在学习到与该时刻的动作内容相对应的动作地点并且设置了一个或更多个动作地点的情况下,动作计划单元123基于每个动作地点的确定程度和距每个动作地点的距离来确定动作地点。例如,在将动作地点设置在预定距离的范围内的情况下,动作计划单元123从预定距离的范围内的动作地点中选择确定程度最高的动作地点。注意,在预定距离的范围内只有一个动作地点的情况下,选择该一个动作地点。另一方面,例如,在动作地点没有被设置在预定距离的范围内的情况下,动作计划单元123将自主移动体11的当前位置确定为动作地点。
368.动作计划单元123将指示动作内容和动作地点的数据提供给操作控制单元124。
369.在步骤s205中,自主移动体11移动到所确定的动作地点。具体地,操作控制单元124控制驱动单元104以将自主移动体11移动到所确定的动作地点。
370.在步骤s206中,自主移动体11执行动作。具体地,操作控制单元124控制驱动单元104和输出单元105以使得自主移动体11执行由动作计划单元123设置的动作。
371.此后,处理返回到步骤s201,并且执行步骤s201之后的处理。
372.此后,将参照图24描述图21的动作控制处理的具体示例。
373.图24是示出定义自主移动体11的排尿时刻的尿意系数的时间序列变化的图。
374.在时刻t0处,当自主移动体11的电源接通并且自主移动体11被激活时,例如,尿意系数被设置为0.6。
375.注意,尿意系数以预定速率(例如,在1小时内+0.1)线性增加,直到自主移动体11执行预定动作(例如,排尿、进食、转换到待机模式等)或者尿意系数达到1.0。
376.在时刻t1处,当自主移动体11执行进食的操作时,尿意系数增加到0.9。当尿意意图系数大于或等于0.9时,自主移动体11开始指示其期望排尿的操作。例如,在尿意系数从0.9到0.95的范围内,自主移动体11执行不安静的运动。此外,例如,在尿意系数从0.95至1.0的范围内,自主移动体11的不安静的运动变大。
377.当尿意系数在时刻t2处达到1.0时,自主移动体11确定满足排尿条件,并且在时刻t3处自发排尿。此时,通过上述图21的步骤s205的处理来确定排尿的地点。此外,当执行排尿时,尿意系数下降到0。
378.在时刻t4处,当自主移动体11执行进食的操作时,尿意系数增加到0.9。
379.在时刻t5处,例如,在用户向自主移动体11指示“小便”的情况下,自主移动体11根据该指示排尿。此时,通过上述图21的步骤s205的处理来确定排尿的地点。此外,当执行排尿时,尿意系数下降到0。
380.当自主移动体11在时刻t6处转换到待机模式时,尿意系数的变化停止,并且在待机模式期间保持尿意系数不增加或减少。
381.在时刻t7处,当自主移动体11从待机模式返回时,尿意系数开始再次上升。
382.如上所述,用户可以对自主移动体11执行预定动作的地点执行规定。
383.注意,通过上述处理,可以对自主移动体11执行除排尿之外的任何动作的地点执行规定。
384.例如,当用户回家时,可以对自主移动体11欢迎用户的地点(例如,入口等)执行规定。
385.此外,通过类似的处理,可以针对禁止预定动作的地点对自主移动体11进行规定。
386.例如,可以针对自主移动体11被禁止接近或进入的地点来规定自主移动体11。
387.具体地,例如,在自主移动体11重复地撞击同一椅子的情况下,当自主移动体11撞击椅子时,用户重复诸如“此处不好,因为你撞了椅子”,“此处不好,因为危险”等的指令,由此自主移动体11将椅子的附近学习为危险地点。因此,自主移动体11逐渐移动而避开椅子的附近。
388.此外,例如,厨房是用户不希望自主移动体11进入的地点,因为用户进行烹饪或洗涤,地板是湿的,并且是危险的。因此,例如,每当自主移动主体11接近或进入厨房时,用户给出诸如“不能来到厨房”的指令。因此,自主移动体11学习到厨房是自主移动体11不应该进入的地点,并且逐渐开始避免进入厨房。
389.注意,例如,也可以通过组合上述第一方法和第二方法来规定自主移动体11。
390.例如,作为家庭主妇的用户对于自主移动体11将入口指示为欢迎用户主人的地点,并且在类似的时区重复地给出“在入口处欢迎主人”的指令。因此,当时区是上述时区时,自主移动体11逐渐能够在入口处欢迎主人。
391.例如,当用户希望自主移动体11安静时或者当用户不希望自主移动体11靠近时,用户指示自主移动体11等待的地点,并且重复地给出“在通常的地方等待”的指令。因此,自主移动体11逐渐能够在指示地点处待机。此外,通过学习给出指令的状况,当用户希望自主移动体11安静时或者当用户不希望自主移动体11靠近时,自主移动体11能够自发地移动到指示地点并待机。
392.例如,在自主移动体11总是停止在相同地点的情况下,每次自主移动体11停止在该地点时,用户给出诸如“这里没有东西,可以行走”的指令。因此,自主移动体11可以将该地点学习为安全地点,并且逐渐地能够继续行走而不在该地点处停止。
393.《规定自主移动体11的第三方法》
394.接下来,将参照图25描述规定自主移动体11的第三方法。
395.在第三方法中,当自主移动体11记住触发动作执行的对象(即,触发动作的对象(下文中称为动作触发对象))并且找到该对象等时,对自主移动体11进行规定以执行与该对象相对应的动作。
396.《动作控制处理的第三实施方式》
397.此处,将参照图25的流程图描述由自主移动体11执行的动作控制处理的第三实施方式。
398.该处理在自主移动体11的电源接通时开始,并且在自主移动体11的电源断开时结束。
399.在步骤s301中,识别单元121基于从输入单元101提供的传感器数据确定是否指示了对象。在确定未指示对象的情况下,处理进行到步骤s302。
400.在步骤s302中,识别单元121基于从输入单元101提供的传感器数据确定是否识别出触发动作的对象。在未识别出新对象的情况下,识别单元121确定未识别出触发动作的对象,并且处理返回到步骤s301。
401.另一方面,在识别出新对象的情况下,识别单元121识别对象的类型。此外,在稍后描述的步骤s313的处理中,识别单元121从存储单元106中读取通过学习每个动作与每个对象之间的相关性而获得的动作对象相关性数据。
402.动作对象相关性数据是学习结果数据之一,并且是指示每个动作与触发每个动作的执行的动作触发对象之间的相关性的数据。例如,动作对象相关性数据指示由用户指示的对象与和对象的指示一起给出指令的动作之间的相关性。
403.在动作对象相关性数据中不存在与所识别的对象的类型相匹配的动作触发对象的情况下,识别单元121确定未识别出触发动作的对象,并且处理返回到步骤s301。
404.此后,重复执行步骤s301和步骤s302的处理,直到在步骤s301中确定指示了对象,或者在步骤s302中确定识别出触发动作的对象。
405.另一方面,在步骤s301中,例如,在识别出用户指向要由自主移动体11记得的对象或在自主移动体11的前方呈现该对象的情况下,识别单元121确定指示了该对象,并且处理进行到步骤s303。
406.在步骤s303中,与图17的步骤s103的处理类似地确定是否从用户给出指令。在确定从用户给出指令的情况下,处理进行到步骤s304。
407.在步骤s304中,动作计划单元123基于用户的指令设置动作内容。具体地,识别单元121将指示所指示的对象的类型和所识别的用户指令的内容的数据提供给动作计划单元123。动作计划单元123基于指示对象的类型和给出指令的内容以及对象的指示来设置动作内容。动作计划单元123将指示所设置的动作内容的数据提供给操作控制单元124。此外,识别单元121将指示所指示对象的类型的数据提供给学习单元122。
408.此后,处理进行到步骤s309。
409.另一方面,在步骤s303中确定没有从用户给出指令的情况下,处理进行到步骤s305。
410.在步骤s305中,识别单元121确定是否指示了触发动作的对象。具体地,在动作对象相关性数据中存在与指示对象的类型相匹配的动作触发对象的情况下,识别单元121确定指示了触发动作的对象,并且处理进行到步骤s306。
411.在步骤s306中,动作计划单元123基于指示对象来设置动作内容。具体地,识别单元121将指示所指示的动作触发对象的类型的数据提供给学习单元122和动作计划单元123。
412.动作计划单元123基于所指示的动作触发对象的类型和存储在存储单元106中的动作对象相关性数据来设置动作内容。即,与动作状况相关性数据中的指示对象(动作触发对象)相关联的动作内容被设置为要由自主移动体11执行的动作内容。动作计划单元123将指示所设置的动作内容的数据提供给操作控制单元124。
413.此后,该处理进行到步骤s309。
414.另一方面,在步骤s305中,在动作对象相关性数据中不存在与指示对象的类型相匹配的动作触发对象的情况下,识别单元121确定未指示触发动作的对象,并且处理进行到步骤s307。
415.在步骤s307中,动作计划单元123设置预定的动作内容。具体地,识别单元121将指示与动作触发对象不同的对象(下文中称为非动作触发对象)以及非动作触发对象的类型的数据提供给动作计划单元123。此外,识别单元121将指示非动作触发对象的类型的数据提供给学习单元122。
416.此处,例如,预先设置指示非动作触发对象的情况下的动作内容。动作计划单元123将指示动作内容的数据提供给操作控制单元124。
417.此后,处理进行到步骤s309。
418.另一方面,在步骤s302中,在动作对象相关数据中存在与所识别的对象的类型匹配的动作触发对象的情况下,识别单元121确定识别出触发动作的对象,并且处理进行到步骤s308。
419.在步骤s308中,通过类似于步骤s306的处理,基于识别的对象设置动作内容。此外,识别单元121将指示所识别的动作触发对象的类型的数据提供给学习单元122。
420.此后,处理进行到步骤s309。
421.在步骤s309中,与图17的步骤s106的处理类似地开始动作。
422.在步骤s310中,与图17的步骤s107的处理类似地,确定动作是否完成。在确定动作
未完成的情况下,处理进行到步骤s311。
423.在步骤s311中,与图17的步骤s108的处理类似地,确定是否停止动作。在确定不停止动作的情况下,处理返回到步骤s310。
424.此后,重复执行步骤s310和步骤s311的处理,直到在步骤s310中确定动作完成,或者在步骤s311中确定停止动作。
425.另一方面,在步骤s310中确定动作完成的情况下,处理进行到步骤s313。
426.此外,在步骤s311中确定停止动作的情况下,处理进行到步骤s312。
427.在步骤s312中,与图17的步骤s110的处理类似地,停止动作。
428.此后,处理进行到步骤s313。
429.在步骤s313中,学习单元122学习动作与对象之间的相关性。
430.具体地,动作计划单元123将执行的动作内容和指示动作是否完成的数据提供给学习单元122。
431.学习单元122将该时间的动作结果添加到存储在存储单元106中的动作历史数据。
432.此外,学习单元122通过基于动作历史数据学习每个动作与对象之间的相关性来更新动作对象相关性数据。例如,学习单元122计算每个动作与每个对象之间的相关度(例如,相关系数)。
433.注意,例如,在某个动作完成的情况下,使动作与触发该动作的对象之间的相关度较大。另一方面,例如,在某个动作在中间停止的情况下,使动作与触发该动作的对象之间的相关度较小。
434.然后,学习单元122针对每个动作将具有大于或等于预定阈值的相关度的对象关联为动作触发对象。
435.因此,例如,在用户重复呈现相同类型的对象并在过去给出类似指令的情况下,该对象与对应于该指令的动作相关联,作为动作触发对象。
436.此后,处理返回到步骤s301,并且执行步骤s301之后的处理。
437.如上所述,可以使用对象针对动作来规定自主移动体11。
438.例如,用户重复地向自主移动体11呈现用户喜爱的对象并且向自主移动体11讲话,由此自主移动体11逐渐能够执行对该对象感兴趣的动作。例如,儿童重复地将儿童喜爱的玩具呈现给自主移动体11并说出“我们玩吧”,由此自主移动体11逐渐开始玩玩具。此外,例如,在自主移动体11发现该玩具的情况下,自主移动体11自发地玩玩具。
439.例如,用户重复地向自主移动体11呈现食物玩具并且给出诸如“吃”、“食物”和“记住食物”的指令,由此自主移动体11逐渐将玩具识别为食物。然后,例如,在呈现玩具的情况下,自主移动体11逐渐执行吃玩具的动作。此外,例如,在自主移动体11发现玩具的情况下,自主移动体11开始自发地执行吃玩具的动作。
440.相反,例如,用户重复地向自主移动体11呈现不是食物的玩具并且给出诸如“你不能吃它”和“不是食物”的指令,由此自主移动体11逐渐地识别出玩具不是食物。然后,例如,自主移动体11逐渐停止执行吃玩具的动作。
441.注意,例如,还可以通过组合上述第二方法和第三方法来规定自主移动体11。
442.例如,用户重复地将自主移动体11移动到玩具要被收起来的地点、呈现玩具并且给出诸如“在这里收起来”的指令。因此,自主移动体11逐渐记住将玩具收起来的地点和动
作。例如,在开始时,即使用户给出了指令“将玩具收起来”,自主移动体11有时不收起玩具或者将玩具放在错误的地点。然而,最后,如果用户给出指令“将玩具收起来”,则自主移动体11能够将玩具放在适当的地点。此外,例如,当发现玩具时,自主移动体11能够自发地将玩具放在适当的地点。
443.《信息处理终端12的用户界面的示例》
444.接下来,将参照图26至图35描述关于用于自主移动体11的规定的信息处理终端12的用户界面的示例。
445.图26至图28示出了在自主移动体11正在执行无声动作的情况下信息处理终端12的显示器501的显示示例。
446.图26示出了主屏幕的示例。图标511至513和动画514显示在主屏幕上。
447.在按下主屏幕左上角的图标511的情况下,显示菜单屏幕。通过从菜单屏幕转换到另一屏幕,用户可以确认例如关于如何升起自主移动体11的建议、关于用户的信息等。
448.当按下主屏幕的右上角的图标512时,显示信息屏幕。在信息屏幕上,例如,显示关于自主移动体11的信息、来自提供关于自主移动体11的服务的公司的信息等。此外,未读信息的条数显示在图标512的左上部分。注意,稍后将描述信息屏幕的具体示例。
449.当按下主屏幕中心和底部的图标513时,显示信息确认屏幕。在信息确认屏幕上,例如,显示关于自主移动体11的角色、性别、动作、剩余电池水平等的信息。
450.动画514是模仿自主移动体11的动画,并且表示自主移动体11的当前状态。在该示例中,在动画514的嘴部部分中显示指示自主移动体11处于无声动作的交叉标记图像521。
451.图27示出了在图26的主屏幕上的图标512被按下的情况下显示的信息屏幕的示例。
452.注意,在信息屏幕中的句子的“机器人”部分中,实际上输入了产品名称或自主移动体11的名称。这也适用于以下屏幕示例。
453.在从信息屏幕的顶部开始的第二行中,指示了用于自主移动主体11的无声动作的规定的状况。在该示例中,指示自主移动体11逐渐记住自主移动体11被告知“安静”的事情,并且进行规定。
454.图28示出了显示从图27的信息屏幕的顶部开始的第二行中的信息的内容的屏幕的示例。在该示例中,显示指示用于自主移动体11的无声动作的的熟练水平的信息。具体地,指示当习惯自主移动体11时,自主移动体11变得更耐心且更安静。此外,当呼叫自主移动体11的名称时,无声动作停止并且运动开始。
455.注意,例如,熟练水平可以由特定数值等表示。
456.图29至图31示出了在自主移动体11睡眠的情况下信息处理终端12的显示器501的显示示例。
457.图29示出了主屏幕的示例。注意,在图中,与图26中相对应的部分用相同的附图标记表示,并且适当地省略其描述。
458.在图29的主屏幕中,类似于图26的主屏幕,显示图标511至513和动画514。此外,添加了按钮541和图标542。
459.动画514指示自主移动体11正在睡眠。
460.例如,在一个用户拥有多个自主移动体11的情况下,显示按钮541。例如,当按下按
钮541时,显示用于选择要对其信息进行确认的自主移动体11的屏幕。
461.图标542指示自主移动体11被安排唤醒的时间。在该示例中,指示自主移动体11被安排在约七点钟醒来。
462.图30示出了在按下图29的主屏幕上的图标513的情况下显示的信息确认屏幕的示例。在该示例中,显示指示自主移动体11正在睡眠并且被安排在约七点醒来的消息。
463.此外,显示指示自主移动体11的活动量的转变(生物节律)的图。在该示例中,指示自主移动体11的活动量在从22:00到7:00的时间段期间减少。
464.图31示出了在按下图29的主屏幕的图标511的情况下显示的设置屏幕的示例。在设置屏幕上,显示关于自主移动体11的各种设置项目。在这些设置项目中,在时区中,用户可以明确地设置自主移动体11的就寝时间和唤醒时间。
465.图32至图35示出了在确认进行规定的自主移动体11的熟练水平等的情况下信息处理终端12的显示器501的显示示例。
466.图32示出了用于确认用于规定的自主移动体11的熟练水平的主屏幕的示例。
467.图601至图604被显示为在主屏幕上沿竖直方向布置。
468.图601指示自主移动体11的总体熟练水平。基于每个规定项目的熟练水平计算总体熟练水平。
469.图602指示在排尿地点(卫生间地点)处进行规定的熟练水平。
470.图603示出了规定无声动作的熟练水平。
471.图604示出了规定睡眠动作的熟练水平。
472.图33示出了在图32的主屏幕中选择图602的情况下显示的屏幕的示例。
473.在该示例中,显示消息621以指导如何规定排尿地点。
474.在消息621之后,显示指示规定排尿地点的熟练水平的图622。
475.在图622下面,尽管省略了详细说明,显示了指示当前设置的排尿地点的图623,。注意,代替地图623,可以显示到指示排尿地点的地图的链接。
476.图34示出了在图32的主屏幕上选择图603的情况下显示的屏幕的示例。
477.在该示例中,显示消息641以指导如何规定无声动作。
478.在消息641下面,显示指示规定无声动作的熟练水平的图642。
479.图35示出了在图32的主屏幕中选择图604的情况下显示的屏幕的示例。
480.在该示例中,显示消息661以指导如何规定睡眠动作。
481.在消息661下面,显示指示规定睡眠动作的熟练水平的图662。
482.例如,在图662下面,尽管省略了详细说明,显示与图30的活动量的图相似的图。
483.如上所述,用户可以通过使用信息处理终端12确认自主移动体11的当前状态、如何进行规定、用于规定的熟练水平等。
484.《《2.修改》》
485.在下文中,将描述本技术的上述实施方式的修改。
486.例如,通过被规定用于某一动作,自主移动体11可以自然地提高用于另一动作而不被规定用于其他动作的熟练水平。特别地,可以使熟练水平在与由于碎片而提高熟练水平的动作相似或相关的动作中提高更多。
487.例如,在用户执行规定的间隔被加宽到大于或等于预定阈值的情况下,自主移动
体11可能逐渐忘记对应于该规定的动作。例如,在用户长时间不执行用于某一动作的规定的情况下,可以降低对该动作的熟练水平。注意,例如,在某一动作的熟练水平超过预定阈值的情况下,即使长时间不执行对该动作的规定,也可以使该动作的熟练水平不降低。
488.例如,自主移动体11可以选择对自主移动体11进行规定的人。例如,在被自主移动体11识别的人是用户或者用户的家人或亲属的情况下,可以由该人对自主移动体11进行规定,并且在被识别的人是另一人的情况下,可以使自主移动体11不受其他人的约束。
489.例如,上述指令动作的次数可以包括给出指令的动作在中间停止且未完成的次数。
490.《《3.其他》》
491.《计算机的配置示例》
492.以上描述的一系列处理步骤可以由硬件执行,或者可以由软件执行。在一系列处理步骤由软件执行的情况下,构成该软件的程序安装在计算机中。此处,计算机包括结合在专用硬件中的计算机以及能够通过安装各种程序来执行各种功能的计算机,例如通用个人计算机等。
493.图36是示出由程序执行上述一系列处理步骤的计算机硬件的配置示例的框图。
494.在计算机1000中,中央处理单元(cpu)1001、只读存储器(rom)1002和随机存取存储器(ram)1003通过总线1004彼此连接。
495.此外,输入/输出接口1005连接到总线1004。输入/输出接口1005连接到输入单元1006、输出单元1007、记录单元1008、通信单元1009和驱动器1010。
496.输入单元1006包括输入开关、按钮、麦克风、成像元件等。输出单元1007包括显示器、扬声器等。记录单元1008包括硬盘、非易失性存储器等。通信单元1009包括网络接口等。驱动器1010驱动可移除介质1011,例如磁盘、光盘、磁光盘或半导体存储器。
497.在如上所述配置的计算机1000中,例如,cpu 1001经由输入/输出接口1005和总线1004将记录在记录单元1008中的程序加载到ram 1003,以执行上述一系列处理步骤。
498.由计算机1000(cpu 1001)执行的程序可以例如通过记录在可移除介质1011中作为封装介质等来提供。此外,可以经由诸如局域网、因特网或数字卫星广播的有线或无线传输介质来提供程序。
499.在计算机1000中,通过将可移除介质1011安装到驱动器1010,可以经由输入/输出接口1005将程序安装到记录单元1008。此外,可以由通信单元1009经由有线或无线传输介质接收程序,并且将该程序安装到记录单元1008。此外,程序可以预先安装到rom 1002或记录单元1008。
500.注意,由计算机执行的程序可以是沿着本说明书中描述的顺序以时间序列执行处理的程序,并且可以是诸如在执行呼叫的情况下以并行或在必要的定时执行处理的程序。
501.此外,在本说明书中,系统是指多个组件(设备、模块(部件)等)的集合,并且所有组件是否在同一机柜中无关紧要。因此,容纳在单独的机柜中并且经由网络彼此连接的多个设备以及在一个机柜中容纳多个模块的一个设备都是系统。
502.此外,本技术的实施方式不限于上述实施方式,并且在不脱离本技术的范围的情况下可以进行各种修改。
503.例如,本技术可以采用经由网络在多个设备中共享一个功能协作地执行处理的云
计算的配置。
504.此外,上述流程图中描述的每个步骤可以通过在多个设备中共享来执行,而不是由一个设备执行。
505.此外,在一个步骤中包括多个处理的情况下,包括在一个步骤中的多个处理可以通过在多个设备中共享来执行,而不是由一个设备执行。
506.《配置的组合示例》
507.本技术还可以具有如下配置。
508.(1)
509.一种自主移动体,包括:
510.识别单元,其识别给出的指令;
511.动作计划单元,其基于所识别的指令来计划动作;以及
512.操作控制单元,其控制所计划的动作的执行,其中,
513.所述动作计划单元随着作为预定动作的指令的动作指令被重复改变所述预定动作的内容。
514.(2)
515.根据(1)所述的自主移动体,其中,
516.所述动作计划单元基于作为给出所述动作指令的次数的指令的次数来改变所述预定动作的内容。
517.(3)
518.根据(2)所述的自主移动体,其中,
519.所述动作计划单元随着所述指令的次数的增加而提高所述预定动作的熟练程度。
520.(4)
521.根据(3)所述的自主移动体,其中,
522.所述动作计划单元在所述预定动作完成的次数超过所述指令的次数时,提高所述预定动作的熟练程度。
523.(5)
524.根据(3)或(4)所述的自主移动体,其中,
525.所述动作计划单元提高所述预定动作的熟练程度并且提高与所述预定动作不同的动作的熟练程度。
526.(6)
527.根据(3)至(5)中任一项所述的自主移动体,其中,
528.所述动作计划单元在所述动作指令的间隔被加宽的情况下降低所述预定动作的熟练程度。
529.(7)
530.根据(1)至(6)中任一项所述的自主移动体,其中,
531.所述识别单元还识别状况,
532.还包括学习单元,所述学习单元学习给出所述指令的状况与给出所述指令的动作之间的相关性,并且
533.所述动作计划单元基于由所述识别单元识别的状况和学习所述相关性的结果来
计划所述动作。
534.(8)
535.根据(7)所述的自主移动体,其中,
536.在完成了给出所述指令的动作的情况下,所述学习单元增大给出所述指令的状况与给出所述指令的动作之间的相关度,并且在给出所述指令的动作在中间停止的情况下,所述学习单元减小所述相关度。
537.(9)
538.根据(7)或(8)所述的自主移动体,其中,
539.所述学习单元基于给出针对所述预定动作的指令的时间的分布来估计针对所述预定动作的期望值的时间序列转换,并且
540.所述动作计划单元基于所述期望值来计划所述动作。
541.(10)
542.根据(9)所述的自主移动体,其中,
543.所述动作计划单元在给出用于促进所述预定动作的指令情况下增加了所述期望值,并且在给出用于抑制所述预定动作的情况下减少了所述期望值。
544.(11)
545.根据(9)或(10)所述的自主移动体,其中,
546.所述动作计划单元在所述期望值大于或等于预定阈值的情况下,计划所述预定动作或与所述预定动作类似的动作。
547.(12)
548.根据(1)至(11)中任一项所述的自主移动体,还包括
549.学习单元,其基于指示地点的历史来学习作为执行所述预定动作的地点的动作地点,所述指示地点是在过去对其给出执行所述预定动作的指令的地点,其中,
550.所述动作计划单元基于学习所述动作地点的结果,确定执行所述预定动作的地点。
551.(13)
552.根据(12)所述的自主移动体,其中,
553.所述学习单元基于所述指示地点的分布来设置一个或更多个所述动作地点,并且
554.所述动作计划单元基于所述动作地点和当前位置,确定执行所述预定动作的地点。
555.(14)
556.根据(13)所述的自主移动体,其中,
557.所述学习单元基于所述指示地点的分布来设置所述动作地点的确定性程度,并且
558.所述动作计划单元基于所述动作地点、确定性程度以及所述当前位置,确定执行所述预定动作的地点。
559.(15)
560.根据(13)或(14)所述的自主移动体,其中,
561.所述学习单元通过执行所述指示地点的聚类来设置所述动作地点。
562.(16)
563.根据(1)至(15)中任一项所述的自主移动体,其中,
564.所述识别单元还识别对象,
565.还包括学习单元,所述学习单元学习所指示的对象与连同所述对象的指示一起给出指令的动作之间的相关性,并且
566.所述动作计划单元基于由所述识别单元识别的对象和学习所述相关性的结果来计划所述动作。
567.(17)
568.一种信息处理方法,包括:
569.识别给出自主移动体的指令;
570.基于识别的指令来计划所述自主移动体的动作,并且随着作为针对所述预定动作的指令的动作指令被重复,改变所述预定动作的内容;以及
571.控制计划的所述自主移动体的动作的执行。
572.(18)
573.一种用于使计算机执行以下处理的程序:
574.识别给出自主移动体的指令;
575.基于识别的指令来计划所述自主移动体的动作,并且随着作为针对所述预定动作的指令的动作指令被重复,改变所述预定动作的内容;以及
576.控制计划的所述自主移动体的动作的执行。
577.(19)
578.一种信息处理设备,包括:
579.识别单元,其识别给出自主移动体的指令;
580.动作计划单元,其基于识别的指令,计划所述自主移动体的动作;以及
581.操作控制单元,其控制计划的所述自主移动体的动作的执行,其中,所述动作计划单元随着作为针对所述预定动作的指令的动作指令被重复,改变所述自主移动体的预定动作的内容。
582.注意,本说明书中描述的有益效果仅是示例,并且本技术的有益效果不限于此并且可以包括其他效果。
583.附图标记列表
[0584]1ꢀꢀꢀ
信息处理系统
[0585]
11
ꢀꢀ
自主移动体
[0586]
12
ꢀꢀ
信息处理终端
[0587]1ꢀꢀꢀ
信息处理服务器
[0588]
103 信息处理单元
[0589]
104 驱动单元
[0590]
105 输出单元
[0591]
121 识别单元
[0592]
122 学习单元
[0593]
123 动作计划单元
[0594]
124 操作控制单元
[0595]
151 期望值计算单元
[0596]
203 信息处理单元
[0597]
204 输出单元
[0598]
302 信息处理单元
[0599]
321 自主移动体控制单元
[0600]
322 应用控制单元
[0601]
331 识别单元
[0602]
332 学习单元
[0603]
333 动作计划单元
[0604]
334 操作控制单元
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1