三轨道滑行自锁移动机构
1.本发明涉及一种机械移动机构,尤其是一种能爬行的三轨道滑行自锁移动机构。
背景技术:
2.目前,市面的爬行移动机构较多,但杆上爬行机构罕见,现有技术存在结构复杂、造价成本高、操作不方便等问题。
技术实现要素:
3.为了解决上述问题,本发明提供一种三轨道滑行自锁移动机构。该机构通过模仿人体行走和爬行动物行走的原理。采用三轨道和人们所熟悉的健骑机驱动方式(赛艇运动)
‑‑‑‑
往复摆动摇杆驱动俩爬行爪在三个柱形轨道上交替移动的形式,实现机构的移动。
4.本发明解决其技术问题所采用的技术方案是:主要由机架结构、控制机构、爬行爪机构、驱动机构组成,整个机构的结构组成、大小和形状是前后对称。
5.机架机构是本机构安装各分机构整体支撑框架,包含两个轨道固定板、两根支撑轨道、一根自锁轨道。三根轨道均为柱杆状且等长,相互平行,自锁轨道在中间,两支撑轨道对称摆放自锁轨道两侧,三轨道两端由轨道固定板固定连接。
6.驱动机构由驱动臂、支撑臂、臂轴、爬行爪轴组成;驱动臂和支撑臂均为长杆零件,驱动臂由长短两段相互垂直杆组成,短杆端部设有通孔,支撑臂由上支撑臂和下支撑臂组成,上支撑臂下部和下支撑臂上部设有连接孔,由两个连接螺栓固定连接上支撑臂和下支撑臂,连接不同连接孔可调节支撑臂长短;上支撑臂上端设有通孔,此通孔与驱动臂短杆的通孔由臂轴铰接;驱动臂和支撑臂能绕臂轴旋转。驱动臂上端设有驱动手柄,驱动臂和支撑臂下端分别设有通孔,通孔内安装有爬行爪轴,与其下面的爬行爪机构连接。
7.爬行爪机构:爬行爪机构包括两个爬行爪,其结构、大小、形状完全相同,分为左爬行爪和右爬行爪,每个爬行爪由爬行爪轴座、爬行爪轴、连接板、两个直线轴承组成。爬行爪轴座是前后、左右对称形体,设有从左到右的通槽,槽内安装有驱动臂或支撑臂,爬行爪轴座从前到后设有通孔,此通孔与驱动臂或支撑臂下端的通孔同轴,由爬行爪轴铰接,驱动臂和支撑臂能绕爬行爪轴旋转;通孔下方设有滑杆滑道孔;滑杆滑道孔前后通透;爬行爪轴座固定在连接板上,连接板是长方形板状,两端由连接螺钉固定连接直线轴承,直线轴承内孔设在支撑轨道上,直线轴承能在支撑轨道上左右移动。
8.控制机构由卡板、卡板手柄、自锁孔、弹簧连接杆、爬行爪轴座、滑杆、弹簧组成。卡板基体是长方形板状,板上设有自锁孔,自锁孔是长圆形孔,自锁孔设在自锁轨道上;卡板上端前后两侧各设有卡板连接块,卡板连接块上设有前后方向的圆柱通孔,圆柱通孔下方设有腰形通孔,右侧设有卡板手柄;卡板连接块上的圆柱通孔设在爬行爪轴上;卡板上的腰形通孔与爬行爪轴座的滑杆滑道孔相对应,爬行爪轴座的滑杆滑道孔内安装有滑杆,滑杆是圆柱体,前后贯穿在腰形通孔之外,两端各连接弹簧的上端,滑杆在弹簧的拉动下能在滑杆滑道孔内左右移动,滑杆滑道孔内的下滑道呈“m”形状,中间和左右两侧低,是滑杆左中
右3个位置的定位槽,卡板下端侧面设有弹簧连接杆,弹簧连接杆连接弹簧下端。
9.本发明的有益效果是:采用健骑机驱动方式,把健身运动应用在实用中,以增强机构的实用性、趣味性和强身健体的作用;采用手动驱动能节省电能,操作灵活方便
‑‑
根据操作者的身体状况随时调整驱动的步幅大小、时间长短和中断;采用三轨道四滑块(直线轴承)使机构移动运行平稳,安全性高;采用卡板自锁机构使结构更简单、成本低。
附图说明
10.下面结合附图和实施例对本发明进一步说明。
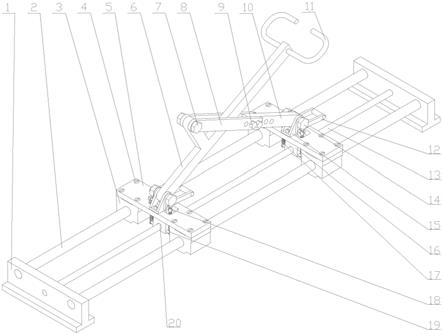
11.图1是表达整体结构的立体图;图2是主视图;图3是图2上沿aa剖切的剖视图,是左视图;图4是图3上沿bb剖切的剖视图,是剖切的主视图;图5是俯视图;图6是驱动臂推到最左位置实施例的立体图;图7是弹簧连接的局部剖视图;图8是卡板处于左挡位置的实施例图;图9是卡板处于右挡位置的实施例图;图10是卡板处于空挡位置的实施例图;图11是左右两爬行爪卡板转向相反(锁止移动)实施例的主视图。
12.图中 1. 轨道固定板,2.支撑轨道,3.直线轴承,4.连接螺钉,5.连接板,6.驱动臂,7.臂轴,8.上支撑臂,9.连接螺栓,10.下支撑臂,11.驱动手柄,12.卡板手柄,13.自锁轨道,14.爬行爪轴,15. 爬行爪轴座,16.卡板,17.弹簧,18.滑杆,19.弹簧连接杆,20.自锁孔,21.滑杆滑道孔,22.腰形通孔,23.卡板连接块。
具体实施方式
13.图1至图5、图7表示本机构的构造组成和零部件的连接和位置关系。主要由机架结构、控制机构、爬行爪机构、驱动机构组成,整个机构的结构组成、大小和形状前后对称。
14.机架机构是本机构安装各分机构整体支撑框架,包含两个轨道固定板1、两根支撑轨道2、一根自锁轨道13组成。三个轨道均为柱杆状且等长,相互平行,自锁轨道13在中间,两支撑轨道2对称摆放自锁轨道13两侧,三轨道两端由轨道固定板1固定连接。
15.驱动机构由驱动臂6、支撑臂、臂轴、爬行爪轴14组成;驱动臂6和支撑臂均为长杆零件,驱动臂6由长短两段相互垂直杆组成,短杆端部设有通孔,支撑臂由上支撑臂8和下支撑臂10组成,上支撑臂8下部和下支撑臂10上部设有连接孔,由两个连接螺栓9固定连接上支撑臂8和下支撑臂10,连接不同连接孔可调节支撑臂长短;上支撑臂8上端设有通孔,此通孔与驱动臂短杆的通孔由臂轴铰接;驱动臂6和支撑臂能绕臂轴旋转。驱动臂6上端设有驱动手柄11,驱动臂6和支撑臂下端分别设有通孔,通孔内安装有爬行爪轴14,与其下面的爬行爪机构连接。
16.爬行爪机构:爬行爪机构包括两个爬行爪,其结构、大小、形状完全相同,分为左爬行爪和右爬行爪,每个爬行爪由爬行爪轴座15、爬行爪轴14、连接板5、两个直线轴承3组成。
爬行爪轴座15是前后、左右对称形体,设有从左到右的通槽,槽内安装有驱动臂6或支撑臂,从前到后设有通孔,此通孔与驱动臂6或支撑臂下端的通孔同轴,由爬行爪轴14铰接,驱动臂6和支撑臂能绕爬行爪轴14旋转;通孔下方设有滑杆滑道孔21;滑杆滑道孔21前后通透;爬行爪轴座15固定在连接板5上,连接板5是长方形板状,两端由连接螺钉4固定连接直线轴承3,直线轴承3内孔设在支撑轨道2上,直线轴承3能在支撑轨道2上左右移动。
17.控制机构由卡板16、卡板手柄12、自锁孔20、弹簧连接杆19、爬行爪轴座15、滑杆18、弹簧17组成。卡板16基体是长方形板状,板上设有自锁孔20,自锁孔20是长圆形孔,自锁孔20设在自锁轨道13上,当卡板16垂直自锁轨道13时,卡板16的自锁孔20不与自锁轨道13接触,卡板16和爬行爪能在自锁轨道13上左右移动,卡板16与自锁轨道13倾斜时,自锁孔20上下边缘卡住自锁轨道13,能锁止卡板16的移动,卡板16上端前后两侧各设有卡板连接块,卡板连接块上设有前后方向的圆柱通孔,圆柱通孔下方设有腰形通孔22,右侧设有卡板手柄12;卡板连接块上的圆柱通孔设在爬行爪轴14上,上下搬动卡板手柄12,卡板16能绕爬行爪轴14左右旋转,起到锁止卡板16移动的作用;卡板16上的腰形通孔22与爬行爪轴座15的滑杆滑道孔21相对应,爬行爪轴座15的滑杆滑道孔21内安装有滑杆18,滑杆18是圆柱体,前后贯穿在腰形通孔22之外,两端各连接弹簧17的上端,滑杆18在弹簧17的拉动下能在滑杆滑道孔21内左右移动,滑杆滑道孔21内的下滑道呈“m”形状,中间和左右两侧低,是滑杆18左中右3个位置的定位槽,卡板16下端侧面设有弹簧连接杆19,弹簧连接杆19连接弹簧17下端。
18.图6是驱动臂6推到最左位置实施例的立体图;表示驱动臂6推到最左极限位置的状态。
19.图8是卡板16处于左挡位置的实施例,也是表示爬行爪向左移动时卡板16位置:向下搬动卡板手柄12,卡板16向左倾斜,卡板16上的自锁孔20边缘卡住自锁轨道13,爬行爪不能向右移动;同时,卡板16上的弹簧连接杆19带动弹簧17向左移动,弹簧17拉动滑杆18到滑杆滑道孔21的左定位槽;推拉驱动臂6带动爬行爪向左移动时,卡板16相对自锁轨道13向右旋转,摆脱与自锁轨道13的自锁,爬行爪能向左移动。综上所述,卡板16处于左挡位置时,爬行爪只能向左移动,不能向右移动。
20.图9是卡板16处于右挡位置的实施例;表示爬行爪向右移动时卡板16位置:向上搬动卡板手柄12,卡板16向右倾斜,卡板16上的自锁孔20边缘卡住自锁轨道13,爬行爪不能向左移动;同时,卡板16上的弹簧连接杆19带动弹簧17向右移动,弹簧17拉动滑杆18到滑杆滑道孔21的右定位槽;推拉驱动臂6带动爬行爪向右移动时,卡板16相对自锁轨道13向左旋转,摆脱与自锁轨道13的自锁,爬行爪能向右移动。综上所述,卡板16处于右挡位置时,爬行爪只能向右移动,不能向左移动。
21.图10是卡板16处于空挡位置的实施例:表示卡板16与自锁轨道13垂直,滑杆18被弹簧17拉到滑杆滑道孔21的中定位槽;卡板16上的自锁孔20不与自锁轨道13接触,卡板16和爬行爪能在自锁轨道13左右移动。
22.图11是左右两爬行爪卡板16转向相反(锁止移动)实施例的主视图。
23.本机构操作有四种形式:向左移动、向右移动、锁止移动和空挡状态。
24.向左移动的操作:向下搬动左右爬行爪上的卡板手柄12,卡板16向左倾斜,如图8、图4所示,左右爬行爪只能向左移动;向右拉动驱动臂6时,右爬行爪不动,左爬行爪向左移
动;向左推动驱动臂6时,左爬行爪不动,右爬行爪向左移动;从而实现推拉动驱动臂6驱动整个机构的向左间歇移动。
25.向右移动的操作:向上搬动左右爬行爪上的卡板手柄12,卡板16向右倾斜,如图9所示,左右爬行爪只能向右移动;同上原理,可实现推拉动驱动臂6驱动整个机构向右间歇移动。
26.锁止移动的操作:搬动左右爬行爪上的卡板手柄12使左右两个卡板16倾斜方向相反,左右爬行爪限定移动方向相反,从而整个机构锁止移动。(如图11所示)空挡状态的操作:搬动左右爬行爪上的卡板手柄12中间位置,卡板16与自锁轨道13垂直,如图10所示,卡板自锁孔20不与轨道接触,左右爬行爪可以左右移动。特殊情况需要这种状态,如维修,电力驱动等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1