乒乓球发球机器人发球速度和旋转控制方法、控制系统与流程
1.本技术属于机器人控制技术领域,具体涉及一种乒乓球发球机器人发球速度和旋转控制方法、控制系统。
背景技术:
2.乒乓球运动在我国具有广泛的群众基础,市场上也有各种各样的乒乓球发球机器人。其中市场占比较大的是挤出式乒乓球发球机器人,它通过橡胶轮挤压乒乓球,使乒乓球以一定的速度和旋转发射出去的方式实现发球。本技术发明人在研发过程中发现,传统挤出式乒乓球发球机器人的挤球电机是开环控制的,乒乓球的速度和旋转只能进行相对定性的等级设置,普遍存在旋转越大速度越大,旋转越小速度越小的相关性,出现这种现象的原因是挤球电机在发球过程中只往一个方向运转。
技术实现要素:
3.为至少在一定程度上克服相关技术中存在的问题,本技术提供了一种乒乓球发球机器人发球速度和旋转控制方法、控制系统。
4.根据本技术实施例的第一方面,本技术提供了一种乒乓球发球机器人发球速度和旋转控制方法,其应用于具有挤球模组的发球机器人中,所述挤球模组包括上轮电机和下轮电机,所述控制方法包括以下步骤:
5.根据用户设置的乒乓球的期望线速度和期望旋转速度,得到上轮电机的期望转速和下轮电机的期望转速;
6.根据上轮电机的期望转速和上轮电机的实际速度,采用pid算法更新上轮电机的pwm占空比,并利用上轮电机的pwm占空比对上轮电机输入端的电压进行控制;根据下轮电机的期望转速和下轮电机的实际速度,采用pid算法更新下轮电机的pwm占空比,并利用下轮电机的pwm占空比对下轮电机输入端的电压进行控制。
7.上述乒乓球发球机器人发球速度和旋转控制方法中,所述根据用户设置的乒乓球的期望线速度和期望旋转速度,得到上轮电机的期望转速和下轮电机的期望转速的具体过程为:
8.利用直流有刷电机的闭环控制,获得多组上轮电机和下轮电机的不同转速下发出去的乒乓球的线速度和旋转速度;
9.利用多项式的最小二乘法拟合获得乒乓球的期望线速度v
ball
、乒乓球期的望旋转速度w
ball
、上轮电机的期望转速n
up
以及下轮电机的期望转速n
down
的约束关系:
[0010][0011]
式中,k1,k2,k3,q1,q2和q3均为拟合获得的多项式系数;
[0012]
通过反函数求解得到上轮电机的期望转速n
up
和下轮电机的期望转速n
down
分别为:
[0013][0014]
进一步地,所述根据上轮电机的期望转速和上轮电机的实际速度,采用pid算法更新上轮电机的pwm占空比的过程为:
[0015]
通过设置在上轮电机上的编码器获取上轮电机的瞬时速度v
i
(k),其中,k表示第几个控制周期,k为大于或等于1的自然数;
[0016]
利用sg平滑算法对上轮电机的瞬时速度v
i
(k)进行平滑滤波处理,得到上轮电机的实际速度v
e
(k);
[0017]
利用上轮电机的期望转速n
up
与实际速度v
e
(k)更新当前控制周期的速度差值dv(k),
[0018]
更新后的当前控制周期的速度差值dv(k)为:
[0019]
dv(k)=n
up
‑
v
e
(k);
[0020]
利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值dv(k
‑
1)更新当前控制周期的速度差值差分ddv(k),利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值积分sdv(k
‑
1)更新当前控制周期的速度差值积分sdv(k),
[0021]
当前控制周期的速度差值差分ddv(k)为:
[0022]
ddv(k)=dv(k)
‑
dv(k
‑
1);
[0023]
当前控制周期的速度差值积分sdv(k)为:
[0024]
sdv(k)=dv(k)+sdv(k
‑
1);
[0025]
利用更新后的当前控制周期的速度差值差分ddv(k)和速度差值积分sdv(k)更新当前控制周期的控制增量dp(k),
[0026]
更新后的当前控制周期的控制增量dp(k)为:
[0027]
dp(k)=k
p
*dv(k)+k
i
*sdv(k)+k
d
*ddv(k);
[0028]
利用更新后的当前控制周期的控制增量dp(k)和上一控制周期的占空比对当前控制周期的占空比进行更新,
[0029]
更新后的当前控制周期的占空比p(k)为:
[0030]
p(k)=p(k
‑
1)+dp(k);
[0031]
通过设置在上轮电机上的编码器重新获取上轮电机的瞬时速度v
i
(k),并循环执行更新上轮电机的pwm占空比的过程。
[0032]
进一步地,所述根据下轮电机的期望转速和下轮电机的实际速度,采用pid算法更新下轮电机的pwm占空比的过程为:
[0033]
通过设置在下轮电机上的编码器获取下轮电机的瞬时速度v
i
(k),其中,k表示第几个控制周期,k为大于或等于1的自然数;
[0034]
利用sg平滑算法对下轮电机的瞬时速度v
i
(k)进行平滑滤波处理,得到下轮电机的实际速度v
e
(k);
[0035]
利用下轮电机的期望转速n
down
与实际速度v
e
(k)更新当前控制周期的速度差值dv(k),
[0036]
更新后的当前控制周期的速度差值dv(k)为:
[0037]
dv(k)=n
down
‑
v
e
(k);
[0038]
利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值dv(k
‑
1)更新当前控制周期的速度差值差分ddv(k),利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值积分sdv(k
‑
1)更新当前控制周期的速度差值积分sdv(k),
[0039]
当前控制周期的速度差值差分ddv(k)为:
[0040]
ddv(k)=dv(k)
‑
dv(k
‑
1);
[0041]
当前控制周期的速度差值积分sdv(k)为:
[0042]
sdv(k)=dv(k)+sdv(k
‑
1);
[0043]
利用更新后的当前控制周期的速度差值差分ddv(k)和速度差值积分sdv(k)更新当前控制周期的控制增量dp(k),
[0044]
更新后的当前控制周期的控制增量dp(k)为:
[0045]
dp(k)=k
p
*dv(k)+k
i
*sdv(k)+k
d
*ddv(k);
[0046]
利用更新后的当前控制周期的控制增量dp(k)和上一控制周期的占空比对当前控制周期的占空比进行更新,
[0047]
更新后的当前控制周期的占空比p(k)为:
[0048]
p(k)=p(k
‑
1)+dp(k);
[0049]
通过设置在下轮电机上的编码器重新获取下轮电机的瞬时速度v
i
(k),并循环执行更新下轮电机的pwm占空比的过程。
[0050]
更进一步地,所述乒乓球发球机器人发球速度和旋转控制方法还包括对更新后的当前控制周期的占空比p(k)进行限幅,其具体过程为:
[0051]
在挤球电机开环控制的情况下,通过测量不同输入电压时挤球电机所能达到的稳态转速和线圈电流,标定获得挤球电机的线圈电阻r、电机电动势系数c
e
和磁通系数φ;
[0052]
根据挤球电机温度的限制需求确定挤球电机的最大线圈电流i
max
;
[0053]
根据电机的电动势平衡方程式u=e+ir=c
e
φn+ir以及挤球电机的线圈电阻r、电机电动势系数c
e
、磁通系数φ、最大线圈电流i
max
和挤球电机的实际速度v
e
(k),得到挤球电机允许输入电压的上边界和下边界;
[0054]
挤球电机允许输入电压的上边界u
max
(k)和下边界u
min
(k)分别为:
[0055][0056]
所述电机的电动势平衡方程式中,u表示直流有刷电机的输入电压,e表示线圈感应电动势,i表示线圈电流;
[0057]
根据直流有刷电机的输入电压u与占空比p的约束关系u=pe
i
以及挤球电机允许输入电压的上边界u
max
(k)和下边界u
min
(k)得到占空比的上边界和下边界,
[0058]
占空比的上边界p
imax
(k)和下边界p
imin
(k)分别为:
[0059][0060]
根据占空比的上边界和下边界对更新后的当前控制周期的占空比p(k)进行限幅,当p(k)>p
imax
(k)时,p(k)=p
imax
(k);当p(k)<p
imin
(k)时,p(k)=p
imin
(k)。
[0061]
根据本技术实施例的第二方面,本技术还提供了一种乒乓球发球机器人发球速度和旋转控制系统,其应用于具有挤球模组的发球机器人中,所述挤球模组包括上轮电机驱动的橡胶轮、下轮电机驱动的橡胶轮以及支撑挤球电机的送球管道,所述挤球电机包括上轮电机和下轮电机,所述上轮电机和下轮电机分别进行相同的独立控制;所述控制系统包括:期望速度求解模块和pid调速模块;
[0062]
所述期望速度求解模块用于根据用户设置的乒乓球的期望线速度和期望旋转速度得到挤球电机的期望转速;
[0063]
所述pid调速模块用于根据挤球电机的实际速度和挤球电机的期望转速,得到更新后的挤球电机的pwm占空比,以利用pwm占空比对挤球电机输入端的电压进行控制。
[0064]
上述乒乓球发球机器人发球速度和旋转控制系统中,所述期望速度求解模块的实现过程为:
[0065]
利用直流有刷电机的闭环控制,获得多组上轮电机和下轮电机的不同转速下发出去的乒乓球的线速度和旋转速度;
[0066]
利用多项式的最小二乘法拟合获得乒乓球的期望线速度v
ball
、乒乓球期的望旋转速度w
ball
、上轮电机的期望转速n
up
以及下轮电机的期望转速n
down
的约束关系:
[0067][0068]
式中,k1,k2,k3,q1,q2和q3均为拟合获得的多项式系数;
[0069]
通过反函数求解得到上轮电机的期望转速n
up
和下轮电机的期望转速n
down
分别为:
[0070][0071]
上述乒乓球发球机器人发球速度和旋转控制系统中,当挤球电机为上轮电机时,所述pid调速模块的实现过程为:
[0072]
通过设置在上轮电机上的编码器获取上轮电机的瞬时速度v
i
(k),其中,k表示第几个控制周期,k为大于或等于1的自然数;
[0073]
利用sg平滑算法对上轮电机的瞬时速度v
i
(k)进行平滑滤波处理,得到上轮电机的实际速度v
e
(k);
[0074]
利用上轮电机的期望转速n
up
与实际速度v
e
(k)更新当前控制周期的速度差值dv(k),
[0075]
更新后的当前控制周期的速度差值dv(k)为:
[0076]
dv(k)=n
up
‑
v
e
(k);
[0077]
利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值dv(k
‑
1)更新当前控制周期的速度差值差分ddv(k),利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值积分sdv(k
‑
1)更新当前控制周期的速度差值积分sdv(k),
[0078]
当前控制周期的速度差值差分ddv(k)为:
[0079]
ddv(k)=dv(k)
‑
dv(k
‑
1);
[0080]
当前控制周期的速度差值积分sdv(k)为:
[0081]
sdv(k)=dv(k)+sdv(k
‑
1);
[0082]
利用更新后的当前控制周期的速度差值差分ddv(k)和速度差值积分sdv(k)更新当前控制周期的控制增量dp(k),
[0083]
更新后的当前控制周期的控制增量dp(k)为:
[0084]
dp(k)=k
p
*dv(k)+k
i
*sdv(k)+k
d
*ddv(k);
[0085]
利用更新后的当前控制周期的控制增量dp(k)和上一控制周期的占空比对当前控制周期的占空比进行更新,
[0086]
更新后的当前控制周期的占空比p(k)为:
[0087]
p(k)=p(k
‑
1)+dp(k);
[0088]
通过设置在上轮电机上的编码器重新获取上轮电机的瞬时速度v
i
(k),并循环执行所述pid调速模块的实现过程。
[0089]
上述乒乓球发球机器人发球速度和旋转控制系统中,当挤球电机为下轮电机时,所述pid调速模块的实现过程为:
[0090]
通过设置在下轮电机上的编码器获取下轮电机的瞬时速度v
i
(k),其中,k表示第几个控制周期,k为大于或等于1的自然数;
[0091]
利用sg平滑算法对下轮电机的瞬时速度v
i
(k)进行平滑滤波处理,得到下轮电机的实际速度v
e
(k);
[0092]
利用下轮电机的期望转速n
down
与实际速度v
e
(k)更新当前控制周期的速度差值dv(k),
[0093]
更新后的当前控制周期的速度差值dv(k)为:
[0094]
dv(k)=n
down
‑
v
e
(k);
[0095]
利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值dv(k
‑
1)更新当前控制周期的速度差值差分ddv(k),利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值积分sdv(k
‑
1)更新当前控制周期的速度差值积分sdv(k),
[0096]
当前控制周期的速度差值差分ddv(k)为:
[0097]
ddv(k)=dv(k)
‑
dv(k
‑
1);
[0098]
当前控制周期的速度差值积分sdv(k)为:
[0099]
sdv(k)=dv(k)+sdv(k
‑
1);
[0100]
利用更新后的当前控制周期的速度差值差分ddv(k)和速度差值积分sdv(k)更新当前控制周期的控制增量dp(k),
[0101]
更新后的当前控制周期的控制增量dp(k)为:
[0102]
dp(k)=k
p
*dv(k)+k
i
*sdv(k)+k
d
*ddv(k);
[0103]
利用更新后的当前控制周期的控制增量dp(k)和上一控制周期的占空比对当前控制周期的占空比进行更新,
[0104]
更新后的当前控制周期的占空比p(k)为:
[0105]
p(k)=p(k
‑
1)+dp(k);
[0106]
通过设置在下轮电机上的编码器重新获取下轮电机的瞬时速度v
i
(k),并循环执行所述pid调速模块的实现过程。
[0107]
进一步地,所述限电流模块的实现过程为:
[0108]
在挤球电机开环控制的情况下,通过测量不同输入电压时挤球电机所能达到的稳态转速和线圈电流,标定获得挤球电机的线圈电阻r、电机电动势系数c
e
和磁通系数φ;
[0109]
根据挤球电机温度的限制需求确定挤球电机的最大线圈电流i
max
;
[0110]
根据电机的电动势平衡方程式u=e+ir=c
e
φn+ir以及挤球电机的线圈电阻r、电机电动势系数c
e
、磁通系数φ、最大线圈电流i
max
和挤球电机的实际速度v
e
(k),得到挤球电机允许输入电压的上边界和下边界;
[0111]
挤球电机允许输入电压的上边界u
max
(k)和下边界u
min
(k)分别为:
[0112][0113]
所述电机的电动势平衡方程式中,u表示直流有刷电机的输入电压,e表示线圈感应电动势,i表示线圈电流;
[0114]
根据直流有刷电机的输入电压u与占空比p的约束关系u=pe
i
以及挤球电机允许输入电压的上边界u
max
(k)和下边界u
min
(k)得到占空比的上边界和下边界,
[0115]
占空比的上边界p
imax
(k)和下边界p
imin
(k)分别为:
[0116][0117]
根据占空比的上边界和下边界对更新后的当前控制周期的占空比p(k)进行限幅,当p(k)>p
imax
(k)时,p(k)=p
imax
(k);当p(k)<p
imin
(k)时,p(k)=p
imin
(k)。
[0118]
根据本技术的上述具体实施方式可知,至少具有以下有益效果:本技术提供的乒乓球发球机器人发球速度和旋转控制方法中,通过设置在挤球电机上的编码器实时获取挤球电机的瞬时速度,能够对挤球电机进行闭环控制,同时控制挤球电机的双向运转,实现“定速变旋转”和“定旋转变速”的相对独立的速度和旋转控制;通过标定拟合挤球电机的期望转速与乒乓球的期望线速度和期望旋转速度的约束关系,能够实现对发球速度和旋转的定量控制。
[0119]
应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本技术所欲主张的范围。
附图说明
[0120]
下面的所附附图是本技术的说明书的一部分,其示出了本技术的实施例,所附附图与说明书的描述一起用来说明本技术的原理。
[0121]
图1为现有技术中发球机器人的挤球模组的结构示意图。
[0122]
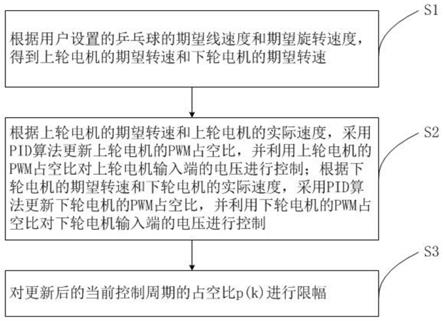
图2为本技术实施例提供一种乒乓球发球机器人发球速度和旋转控制方法的流程图。
[0123]
图3为本技术实施例提供一种乒乓球发球机器人发球速度和旋转控制系统的结构框图。
具体实施方式
[0124]
为使本技术实施例的目的、技术方案和优点更加清楚明白,下面将以附图及详细叙述清楚说明本技术所揭示内容的精神,任何所属技术领域技术人员在了解本技术内容的实施例后,当可由本技术内容所教示的技术,加以改变及修饰,其并不脱离本技术内容的精神与范围。
[0125]
本技术的示意性实施例及其说明用于解释本技术,但并不作为对本技术的限定。另外,在附图及实施方式中所使用相同或类似标号的元件/构件是用来代表相同或类似部分。
[0126]
关于本文中所使用的“第一”、“第二”、
…
等,并非特别指称次序或顺位的意思,也非用以限定本技术,其仅为了区别以相同技术用语描述的元件或操作。
[0127]
关于本文中所使用的“包含”、“包括”、“具有”、“含有”等等,均为开放性的用语,即意指包含但不限于。
[0128]
关于本文中所使用的“及/或”,包括所述事物的任一或全部组合。
[0129]
关于本文中的“多个”包括“两个”及“两个以上”;关于本文中的“多组”包括“两组”及“两组以上”。
[0130]
某些用以描述本技术的用词将于下或在此说明书的别处讨论,以提供本领域技术人员在有关本技术的描述上额外的引导。
[0131]
本技术提供的乒乓球发球机器人发球速度和旋转控制方法适用于市面上常见的挤出式发球机器人,例如实用新型专利cn200720051294.6公开的一种乒乓球发球机。
[0132]
本技术提供的乒乓球发球机器人发球速度和旋转控制方法用于控制发球机器人的挤球模组,其中,挤球模组的结构不在本技术请求保护的范围之内。
[0133]
为便于更清楚的说明本技术提供的乒乓球发球机器人发球速度和旋转控制方法,现对发球机器人的挤球模组的结构进行说明。如图1所示,发球机器人的挤球模组主要包括上轮电机、上轮电机驱动的橡胶轮、下轮电机、下轮电机驱动的橡胶轮以及支撑上轮电机和下轮电机的送球管道,两个橡胶轮边缘的间距略小于乒乓球的直径,送球管道内的乒乓球通过接触运转的橡胶轮以一定的线速度和旋转速度被挤压出去。本技术提供的乒乓球发球机器人发球速度和旋转控制方法的主要控制对象是挤球电机,其中,挤球电机包括用于挤球的上轮电机和下轮电机,上轮电机和下轮电机均采用直流有刷电机。
[0134]
如图2所示,本技术提供的乒乓球发球机器人发球速度和旋转控制方法包括以下步骤:
[0135]
s1、根据用户设置的乒乓球的期望线速度和期望旋转速度,得到上轮电机的期望转速和下轮电机的期望转速,其具体过程为:
[0136]
s11、利用直流有刷电机的闭环控制,获得多组上轮电机和下轮电机的不同转速下发出去的乒乓球的线速度和旋转速度。
[0137]
s12、利用多项式的最小二乘法拟合获得乒乓球的期望线速度v
ball
、乒乓球期的望旋转速度w
ball
、上轮电机的期望转速n
up
以及下轮电机的期望转速n
down
的约束关系:
[0138][0139]
式(1)中,k1,k2,k3,q1,q2和q3均为拟合获得的多项式系数。
[0140]
s13、通过反函数求解得到上轮电机的期望转速n
up
和下轮电机的期望转速n
down
。
[0141][0142]
s2、根据上轮电机的期望转速n
up
和上轮电机的实际速度,采用pid算法更新上轮电机的pwm占空比,并利用上轮电机的pwm占空比对上轮电机输入端的电压进行控制;根据下轮电机的期望转速n
down
和下轮电机的实际速度,采用pid算法更新下轮电机的pwm占空比,并利用下轮电机的pwm占空比对下轮电机输入端的电压进行控制。
[0143]
需要说明的是,上轮电机和下轮电机采用相同的控制方式,且分别独立控制。下面以挤球电机进行说明,以说明挤球电机的pwm占空比的更新过程。其中,以下说明中的挤球电机为上轮电机和下轮电机中的一种。
[0144]
s21、初始化挤球电机的期望转速和实际速度的速度差值dv(0)=0、速度差值差分ddv(0)=0、速度差值积分sdv(0)=0、挤球电机的输入占空比p(0)=0。
[0145]
s22、通过设置在挤球电机上的编码器获取挤球电机的瞬时速度v
i
(k),其中,k表示第几个控制周期,k为大于或等于1的自然数。。
[0146]
s23、利用sg平滑算法对挤球电机的瞬时速度v
i
(k)进行平滑滤波处理,得到挤球电机的实际速度v
e
(k)。
[0147]
s24、利用挤球电机的期望转速v
r
(k)与实际速度v
e
(k)更新当前控制周期的速度差值dv(k)。即:
[0148]
更新后的当前控制周期的速度差值dv(k)为:
[0149]
dv(k)=v
r
(k)
‑
v
e
(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0150]
s25、利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值dv(k
‑
1)更新当前控制周期的速度差值差分ddv(k),利用当前控制周期的速度差值dv(k)和上一个控制周期的速度差值积分sdv(k
‑
1)更新当前控制周期的速度差值积分sdv(k)。即:
[0151]
当前控制周期的速度差值差分ddv(k)为:
[0152]
ddv(k)=dv(k)
‑
dv(k
‑
1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0153]
当前控制周期的速度差值积分sdv(k)为:
[0154]
sdv(k)=dv(k)+sdv(k
‑
1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0155]
s26、利用更新后的当前控制周期的速度差值差分ddv(k)和速度差值积分sdv(k)更新当前控制周期的控制增量dp(k)。即:
[0156]
更新后的当前控制周期的控制增量dp(k)为:
[0157]
dp(k)=k
p
*dv(k)+k
i
*sdv(k)+k
d
*ddv(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0158]
s27、利用更新后的当前控制周期的控制增量dp(k)和上一控制周期的占空比对当前控制周期的占空比进行更新。即:
[0159]
更新后的当前控制周期的占空比p(k)为:
[0160]
p(k)=p(k
‑
1)+dp(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0161]
s28、重复执行步骤s22
‑
s27。
[0162]
需要说明的是,在步骤s27与步骤s28之间还设置有以下步骤:
[0163]
根据占空比的实际输入情况,对当前控制周期的占空比p(k)进行限幅。
[0164]
具体地,当p(k)>100时,p(k)=100;当p(k)<
‑
100时,p(k)=
‑
100。此处p(k)取正值表示挤球电机正方向运转,p(k)取负值表示挤球电机负方向运转。
[0165]
本技术提供的乒乓球发球机器人发球速度和旋转控制方法通过定量设置乒乓球的期望线速度和期望旋转速度,能够获得上轮电机的期望转速和下轮电机的期望转速,进而实现对上轮电机和下轮电机输入端的电压进行控制,以实现发球的精确控制。
[0166]
由于机器人发球的频率一般都大于1hz,挤球电机进行频繁正反转切换时,挤球电机将会出现发热问题;因此有必要对上轮电机和下轮电机的电流进行限制。本技术提供的乒乓球发球机器人发球速度和旋转控制方法还包括以下步骤:
[0167]
s3、对更新后的当前控制周期的占空比p(k)进行限幅,其具体过程为:
[0168]
s31、在挤球电机开环控制的情况下,通过测量不同输入电压时挤球电机所能达到的稳态转速和线圈电流,标定获得挤球电机的线圈电阻r、电机电动势系数c
e
和磁通系数φ。
[0169]
s32、根据挤球电机温度的限制需求确定挤球电机的最大线圈电流i
max
。
[0170]
s33、根据电机的电动势平衡方程式u=e+ir=c
e
φn+ir以及挤球电机的线圈电阻r、电机电动势系数c
e
、磁通系数φ、最大线圈电流i
max
和挤球电机的实际速度v
e
(k),得到挤球电机允许输入电压的上边界和下边界。
[0171]
挤球电机允许输入电压的上边界u
max
(k)和下边界u
min
(k)分别为:
[0172][0173]
电机的电动势平衡方程式中,u表示直流有刷电机的输入电压,e表示线圈感应电动势,i表示线圈电流。
[0174]
s34、根据直流有刷电机的输入电压u与占空比p的约束关系u=pe
i
以及式(7)得到占空比的上边界和下边界。其中,e
i
表示pwm控制器的输入电压,为常量。
[0175]
占空比的上边界p
imax
(k)和下边界p
imin
(k)分别为:
[0176][0177]
s35、根据占空比的上边界和下边界对更新后的当前控制周期的占空比p(k)进行限幅,从而达到限制挤球电机线圈电流的目的。
[0178]
当p(k)>p
imax
(k)时,p(k)=p
imax
(k);当p(k)<p
imin
(k)时,p(k)=p
imin
(k)。
[0179]
需要说明的是,步骤s3中所述的挤球电机为上轮电机和下轮电机中的一种,上轮电机和下轮电机分别进行相互独立的相同控制。
[0180]
本技术提供的乒乓球发球机器人发球速度和旋转控制方法中,通过设置在挤球电机上的编码器实时获取挤球电机的瞬时速度,能够对挤球电机进行闭环控制,同时控制挤球电机的双向运转,实现“定速变旋转”和“定旋转变速”的相对独立的速度和旋转控制;通过标定拟合挤球电机的期望转速与乒乓球的期望线速度和期望旋转速度的约束关系,能够实现对发球速度和旋转的定量控制。
[0181]
本技术提供的乒乓球发球机器人发球速度和旋转控制方法通过对乒乓球的线速度和旋转速度进行定量独立控制,能够有效地提高发球机器人的实用性和可靠性。
[0182]
本技术提供的乒乓球发球机器人发球速度和旋转控制方法通过对上轮电机的期望转速和下轮电机的期望转速进行独立地、正负双向的控制,能够实现更多类型的发球,比如“定速变旋转”和“定旋转变速”等。
[0183]
与传统挤球电机的开环控制相比,本技术提供的乒乓球发球机器人发球速度和旋转控制方法通过pid算法能够对挤球电机的速度进行更加精确的控制,从而提高发球的一致性。
[0184]
本技术提供的乒乓球发球机器人发球速度和旋转控制方法通过对更新后的当前控制周期的占空比p(k)进行限幅,能够有效地控制高频率发球过程中挤球电机速度大范围切换带来的发热问题,进一步提高发球机器人的可靠性和使用寿命。
[0185]
在以上乒乓球发球机器人发球速度和旋转控制方法的基础上,本技术还提供了一种乒乓球发球机器人发球速度和旋转控制系统,该系统应用于具有挤球模组的发球机器人中,挤球模组包括上轮电机驱动的橡胶轮、下轮电机驱动的橡胶轮以及支撑挤球电机的送球管道,挤球电机包括上轮电机和下轮电机。本技术乒乓球发球机器人发球速度和旋转控制系统对上轮电机和下轮电机分别进行相同的独立控制。
[0186]
如图3所示,本技术乒乓球发球机器人发球速度和旋转控制系统包括期望速度求解模块1和pid调速模块2。
[0187]
其中,期望速度求解模块1用于根据用户设置的乒乓球的期望线速度和期望旋转速度得到挤球电机的期望转速。期望速度求解模块1的具体实现过程与上述步骤s11
‑
步骤s13相同,在此不再赘述。
[0188]
期望速度求解模块1能够实现对乒乓球的线速度和旋转速度的定量控制,正负双向速度的设置能够实现更多类型的发球,比如“定速变旋转”和“定旋转变速”等。
[0189]
pid调速模块2用于根据挤球电机的实际速度和挤球电机的期望转速,得到更新后的挤球电机的pwm占空比,以利用pwm占空比对挤球电机输入端的电压进行控制。pid调速模
块2的具体实现过程与上述步骤s21
‑
步骤s28相同,在此不再赘述。
[0190]
pid调速模块2相比于传统挤球电机的开环控制,能够对挤球电机的速度进行更加精确的控制,提高发球的一致性。
[0191]
本技术提供的乒乓球发球机器人发球速度和旋转控制系统还包括限电流模块3,限电流模块3用于对更新后的当前控制周期的占空比p(k)进行限幅。限电流模块的具体实现过程与上述步骤s31
‑
步骤s35相同,在此不再赘述。
[0192]
限电流模块3能够有效地控制高频率发球过程中挤球电机速度大范围切换带来的发热问题,进一步提高发球机器人的可靠性和使用寿命。
[0193]
需要说明的是:上述实施例提供的乒乓球发球机器人发球速度和旋转控制系统仅以上述各程序模块的划分进行举例说明,实际应用中,可以根据需要而将上述处理分配由不同的程序模块完成,即将乒乓球发球机器人发球速度和旋转控制系统内部结构划分成不同的程序模块,以完成以上描述的全部或者部分处理。另外,上述实施例提供的乒乓球发球机器人发球速度和旋转控制系统与乒乓球发球机器人发球速度和旋转控制方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
[0194]
在示例性实施例中,本技术实施例还提供了一种乒乓球发球机器人发球速度和旋转控制装置,其包括存储器和处理器,处理器被配置为基于存储在存储器中的指令,执行本技术中任一个实施例中的乒乓球发球机器人发球速度和旋转控制方法。
[0195]
其中,存储器可以为系统存储器或固定非易失性存储介质等,系统存储器可以存储有操作系统、应用程序、引导装载程序、数据库以及其他程序等。
[0196]
在示例性实施例中,本技术实施例还提供了一种计算机存储介质,是计算机可读存储介质,例如,包括计算机程序的存储器,上述计算机程序可由处理器执行,以完成本技术中任一个实施例中的乒乓球发球机器人发球速度和旋转控制方法。
[0197]
上述的本技术实施例可在各种硬件、软件编码或两者组合中进行实施。例如,本技术的实施例也可表示在数据信号处理器中执行上述方法的程序代码。本技术也可涉及计算机处理器、数字信号处理器、微处理器或现场可编程门阵列执行的多种功能。可根据本技术配置上述处理器执行特定任务,其通过执行定义了本技术揭示的特定方法的机器可读软件代码或固件代码来完成。可将软件代码或固件代码发展表示不同的程序语言与不同的格式或形式。也可表示不同的目标平台编译软件代码。然而,根据本技术执行任务的软件代码与其他类型配置代码的不同代码样式、类型与语言不脱离本技术的精神与范围。
[0198]
以上所述仅为本技术示意性的具体实施方式,在不脱离本技术的构思和原则的前提下,任何本领域的技术人员所做出的等同变化与修改,均应属于本技术保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1