空翻转体辅助装置的制作方法
1.本技术涉及空翻辅助装置技术领域,尤其涉及一种空翻转体辅助装置。
背景技术:
2.极限运动是由多项成型运动项目以及游戏、生活和工作中的各种动作演变来,参与人群以年轻人为主的高难度观赏性体育运动。现今社会人们的压力越来越大,按捺不住心情的都市新潮一族不断加入极限运动,而最普及的应该是轮滑和滑板,这是由于这些装置方便携带和操作,而空翻却只能作为跑酷动作的一种特技动作,难以普及,这是因为空翻不仅需要克服心理的恐惧,同时还需要较高的身体素质,而现有技术中缺少空翻的辅助装置,只有空翻训练用的辅助装置。
3.例如,中国专利文献中,专利号cn 202010291502.x于2020年7月28日公开的发明专利,该申请案公开了一种人体后空翻动作辅助装置及方法,涉及运动练习器械领域。该人体后空翻动作辅助装置,包括支撑腿,所述支撑腿顶部的一端与支撑横梁固定连接,所述支撑横梁的正面开设有轨道槽,所述轨道槽上设置有连接装置,所述连接装置上设置有轴承,所述轴承的内圈与转轴固定套接,所述转轴上连接有人体固定装置,所述连接装置内部设置有接触缓冲装置。
4.现有技术中还没有穿戴式的能够在实际场合如操场跑道上应用的空翻转体辅助装置。
技术实现要素:
5.基于现有技术中的上述不足,本发明提供了一种空翻转体辅助装置,能够完成空翻时的辅助助力,穿戴式使用,降低空翻的门槛,并且兼具安全防护的作用。
6.为了实现上述发明目的,本技术采用以下技术方案。
7.一种空翻转体辅助装置,包括头戴式的倾倒方向检测模块和位于人体足部的助力模块,还包括位于足部的腾空检测模块,助力模块包括框架,框架内设有驱动电源和喷气腔,喷气腔内设有电力驱动的驱动电机,驱动电机上设有驱动叶片,喷气腔包括朝向足部下方设置的喷气口和垂直喷气口轴线设置的若干个不同朝向的进气口,进气口配备有控制阀门;助力模块还包括位于框架外侧底部的弹性减震机构;倾倒方向检测模块包括头盔和头盔内的加速度方向感应装置;腾空检测模块包括位于框架底部的若干个压力传感器;倾倒方向检测模块、助力模块和腾空检测模块电性连接一控制电路模块。
8.本技术通过腾空检测模块判断人体是否腾空跳起离地,在检测到人体腾空离地后,头盔内的加速度方向感应装置通过惯性作用检测到人体头部朝向,从而判断人体的空翻方向,在确定人体空翻方向后,助力模块的驱动电机运行,根据空翻方向的判断结果打开对应朝向的进气口,进气口进气的同时,喷气口喷气,辅助完成人体的空翻,空翻时通过弹性减震模块来降低落地时的振动,同时通过弹性减震模块能够提供初始空翻时的弹力,进一步方便完成空翻,通过助力模块和倾倒方向检测模块的配合,穿戴本技术能够使身体素
质或体型较胖的人员完成空翻,甚至是连续空翻,可玩性好;能够完成空翻时的辅助助力,穿戴式使用,降低空翻的门槛,并且兼具安全防护的作用。
9.作为优选,倾斜判断模块采用固定在头盔内部的若干个加速度传感器,加速度传感器设有至少四个。通过多个加速度传感器的配合作用,完成不同方向的倾倒判断,提高倾倒方向判断结果的可靠性。
10.作为优选,压力传感器设有两个,两个压力传感器分别位于腾空检测模块的前后两端。两个压力传感器同时检测不到人体压力时才会判定人体腾空,防止人体只是踮脚而造成误判,保证装置的可靠性,延长装置的使用寿命。
11.作为优选,进气口设有八个,八个进气口均垂直喷气腔轴线,进气口之间等角度间隔设置。进气口对应八个方向,相邻的几个进气口还能同时打开,组合进气,能够实现不同方向的进气控制,进气效果高,从而提高助力模块助力人体转向的可靠性,方便完成空翻。
12.作为优选,喷气腔的形状为半球面形,驱动电机位于喷气腔的轴线上端,喷气腔内固定设有用于安装电机的电机架,控制阀门包括阀芯和阀杆,阀芯和进气口配合,电机架上设有配合阀杆的阀孔,阀杆上套设有向外推出阀芯的控制弹簧,驱动电机的轴线设有若干个传动齿轮,传动齿轮的侧面设有配合传动齿轮的电磁夹爪,电磁夹爪的其中一根夹爪为光杆,另一根夹爪上设有与传动齿轮配合的齿条,光杆和阀杆同轴固定,设有齿条的夹爪与阀杆转动连接设置,两个夹爪之间设有复位弹簧。
13.驱动电机能够带动驱动叶片转动,从而实现鼓风,在头盔内的加速度方向感应装置检测并判断人体倾倒方向后,控制电路模块控制与头盔倾倒方向相背侧的阀芯打开,阀芯打开的进气口能够向内喷气,对人体向外的翻转力,喷气孔同时向外喷气,提高人体滞空能力,进而完成空翻;阀芯与阀杆连接,电磁夹爪在通电时能够夹紧从而使齿条与传动齿轮配合,电磁电机的电机轴转动能够阀杆直线移动,在需要关闭阀芯时,电磁夹爪断电,复位弹簧能够带动齿条所在的夹爪复位,在喷气腔内的气流作用下,阀芯会自动复位;从而实现阀芯的单个独立开关控制,阀芯的控制可靠方便,而且由于阀杆、电磁夹爪都为长杆状,对于喷气腔内的空间的利用好,且对气流的影响小,更有利于喷气的进行。
14.作为优选,喷气口的外端设有过滤网。遮挡灰尘和污渍,防止喷气腔内的阀芯和驱动电机被碰撞损坏。
15.作为优选,进气口的形状为圆台形,阀芯的形状也为圆台形,阀芯外侧设有若干道密封圈。阀芯的封堵作用可靠,从而保证进气侧控制的准确性,防止漏气。
16.作为优选,弹性减震机构包括在框架底部边沿设置的弹性框,弹性框和框架底面设有配合的弹性波浪板,弹性波浪板朝向框体外侧的一端设有弧形弹板,弹性框包括配合在弹性波浪板下端的垫板,垫板朝向框体外侧的一端设有弧形盖板,弧形盖板的上端和弧形弹板的上端集成一体,弧形盖板的上端设有限位转轴,框架内设有配合限位转轴的转动孔和配合弧形弹板的转动槽;垫板朝向喷气腔的一端设有滑动板,滑动板的上端设有伸入到框架内的滑动头,框架内设有配合滑动头的滑动槽;弹性波浪板朝向喷气腔的一端与滑动板固定连接。弧形盖板与弧形弹板之间具有空隙,踩踏框架进行起跳时,弹性波浪板受压发生弹性变形,弧形弹板向弧形盖板一侧贴合,滑动头和滑动槽配合起到导向和限位的作用,弹性波浪板弹性复位为人体提供复位力,提高人体的跳起高度,从而方便空翻的进行;弹性框布置在框架底部的四角上,通过弧形弹板和弧形盖板的设置,弹性减震机构还能保
护框架侧面,使框架侧面也具有一定的弹性能力,避免出现框架侧面落地而造成崴脚等情况,从而提高空翻装置的安全性。
17.本发明具有如下有益效果:能够完成空翻时的辅助助力,穿戴式使用,降低空翻的门槛,并且兼具安全防护的作用;辅助人体完成空翻,甚至连续空翻,可玩性高;安全性高。
附图说明
18.图1是本发明的结构示意图。
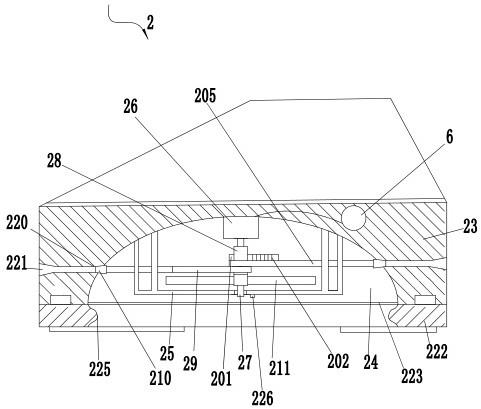
19.图2是本发明中框架内部的剖视图。
20.图3是本发明中头盔内部的纵向剖视图。
21.图4是图3所示头盔内部的加速度感应装置的安装示意图。
22.图5是本发明中喷气腔内从顶部向下的俯视图。
23.图6是本发明中阀杆的结构示意图。
24.图7是本发明中电机架的结构示意图。
25.图9是图8中a
‑
a处的剖视放大图。
26.图8是本发明中弹性减震机构在框架上的安装位置示意图。
27.图10是本发明中控制电路模块的逻辑图。
28.图中:头盔1
ꢀꢀ
内衬10
ꢀꢀ
空腔11
ꢀꢀ
加速度方向感应装置12
ꢀꢀ
助力模块2
ꢀꢀ
压力传感器21
ꢀꢀ
框架23
ꢀꢀꢀ
喷气腔24
ꢀꢀ
电机架25
ꢀꢀ
驱动电机26
ꢀꢀ
电机轴27
ꢀꢀ
传动齿轮28
ꢀꢀ
电磁夹爪29
ꢀꢀ
电磁铁290
ꢀꢀ
铁芯291
ꢀꢀ
安装管292
ꢀꢀ
光杆201
ꢀꢀ
设有齿条的夹爪202
ꢀꢀ
齿条203
ꢀꢀ
复位弹簧204
ꢀꢀ
阀杆205
ꢀꢀ
主控杆206
ꢀꢀ
分杆207
ꢀꢀ
连接杆208
ꢀꢀ
滑块209
ꢀꢀ
阀芯210
ꢀꢀ
驱动叶片211
ꢀꢀ
内圈212
ꢀꢀ
外圈213
ꢀꢀ
连接板214
ꢀꢀ
连接管215
ꢀꢀ
第一竖板216
ꢀꢀ
第二竖板217
ꢀꢀ
安装孔218
ꢀꢀ
杆件219
ꢀꢀ
进气口220
ꢀꢀ
进气嘴221
ꢀꢀ
防滑软垫222
ꢀꢀ
过滤网223
ꢀꢀ
椭圆孔224
ꢀꢀ
缩颈225
ꢀꢀ
转速检测仪226
ꢀꢀ
控制电路模块3
ꢀꢀꢀ
驱动电源6
ꢀꢀ
弹性减震机构7
ꢀꢀ
弹性框71
ꢀꢀ
弹性波浪板72
ꢀꢀꢀ
弧形弹板73
ꢀꢀ
垫板74
ꢀꢀ
弧形盖板75
ꢀꢀ
限位转轴76
ꢀꢀ
转动槽77
ꢀꢀ
滑动板78
ꢀꢀ
滑动头79
ꢀꢀ
滑动槽790。
具体实施方式
29.下面结合附图和具体实施例对本发明进行进一步的阐述。
30.实施例,如图1到10所示,一种空翻转体辅助装置,包括头戴式的倾倒方向检测模块和位于人体足部的助力模块2,还包括位于足部的腾空检测模块。
31.图2、图5到图7中,助力模块2包括框架23,框架23可以作为鞋子穿戴,也可以作为外部结构套在鞋子外穿戴,作为外部结构时,空翻转体辅助装置能够作为租借装置使用以提高商业价值。框架23采用高强度的硬质塑料制成,框架23内设有驱动电源6和喷气腔24,喷气腔24内设有电力驱动的驱动电机26,驱动电机26上设有驱动叶片,喷气腔24包括朝向足部下方设置的喷气口和垂直喷气口轴线设置的若干个不同朝向的进气口,喷气口的外端设有过滤网223。进气口配备有控制阀门;进气口设有八个,八个进气口220位于同一平面内,八个进气口220均垂直喷气腔24轴线,进气口之间等角度间隔设置。喷气腔24的形状为半球面形,驱动电机26位于喷气腔24的轴线上端,喷气腔24内固定设有用于安装电机的电
机架25,控制阀门包括阀芯和阀杆205,阀芯和进气口配合,电机架25上设有配合阀杆205的阀孔,阀杆205上套设有向外推出阀芯的控制弹簧,驱动电机26的轴线设有若干个传动齿轮28,传动齿轮28的侧面设有配合传动齿轮28的电磁夹爪29,电磁夹爪29的其中一根夹爪为光杆201,另一根夹爪上设有与传动齿轮28配合的齿条203,光杆201和阀杆205同轴固定,电磁夹爪29的两根夹爪上设有套设配合的铁芯291和安装管292,安装管292内设有电磁铁290,电磁铁290通电后会对铁芯291产生吸力,从而实现电磁夹紧。安装管292用于电磁铁290和铁芯291之间的限位,以及用于电磁铁的固定安装。实际使用中本技术还可以采用微型电动的型号为ag
‑
95l两指自适应夹爪等,本技术所要求的的夹爪精度低,出于生产成本和结构重量的考虑,采用实施例中的方案更优。设有齿条203的夹爪202与阀杆205转动连接设置,两个夹爪之间设有复位弹簧204。为了方便阀杆205的控制,缩减喷气电机26的电机轴27上的传动齿轮28数目,实现控制组件在鞋体2内更为集成的结构,实施例中将喷气腔24内的空间沿喷气口径向划分为四个象限,每个象限内分别设有一根阀杆205,阀杆205包括与电磁夹爪29连接的主控杆206、位于主控杆206外端的连接杆208,连接杆208上设有三根分杆207,每根分杆207的外端均设有阀芯210,三根分杆207中居中的分杆207与主控杆206同轴并固定连接在连接杆208上,居于两侧的分杆207与连接杆208滑动设置,居于两侧的分杆207一端设有滑块209,连接杆208上设有配合滑块209的滑轨,电机架25上对应主控杆206和分杆207均设有配合的直线轴承,直线轴承固定设置在电机架25上。如图7所示,电机架25包括上下两层,下层和上层均包括同心的内圈212和外圈213,内圈212和外圈213通过六块连接板214在径向连接固定,上层外圈213和下层的外圈213通过竖直的连接管215连接,此外,在上层外圈213和下层外圈213所在的圆柱面上还设有十二块第一竖板216,上层内圈212和下层的内圈212通过圆周阵列的四块第二竖板217连接,直线轴承设置在第一竖板216和第二竖板217上设有用于固定直线轴承的安装孔218,此外也可以直接用安装孔218导向阀杆205。下层的内圈212的中心通过八根圆周阵列汇交设置的杆件219固定设有一轴承座,轴承座内设有轴承,轴承与喷气电机26的电机轴27连接,喷气电机26的电机轴27向下设置,喷气电机的电机轴配备有转速检测仪226。转速检测仪226也固定在电机架25上,喷气电机26的上端固定在框架上,每个象限内的阀芯210统一控制,通过四个象限内的四根阀杆205可以实现在八个方向上的快速控制,控制方便,集成性高。本发明中的阀芯210复位至阀孔内是通过松开电磁夹爪29,利用气流高速流动产生的压差复位,实际使用中为了提高阀芯210的复位效率,可以通过在阀芯210和第一竖板216之间设置压紧弹簧来实现。
32.如图8和图9所示,助力模块2还包括位于框架23外侧底部的弹性减震机构7;弹性减震机构7包括在框架23底部边沿设置的弹性框71,弹性框71设有四个,四个弹性框71分别布置在框架23底部的四角上,四个弹性框71避开进气口设置。弹性框71和框架23底面设有配合的弹性波浪板72,弹性波浪板72朝向框体外侧的一端设有弧形弹板73,弹性框71包括配合在弹性波浪板72下端的垫板74,垫板74朝向框体外侧的一端设有弧形盖板75,弧形盖板75的上端和弧形弹板73的上端集成一体,弧形盖板75的上端设有限位转轴76,框架23内设有配合限位转轴76的转动孔和配合弧形弹板的转动槽77;垫板74朝向喷气腔24的一端设有滑动板78,滑动板78的上端设有伸入到框架23内的滑动头79,框架23内设有配合滑动头79的滑动槽790;弹性波浪板72朝向喷气腔24的一端与滑动板78固定连接,弹性波浪板72和滑动板78也可以通过钣金折弯的方式一体成型。弹性框71可以采用金属材料制成,虽然增
加了框架23的重量,但是弹性框71提供的弹力足以远远超过其重力的影响,并且可以延长弹性减震机构7的使用寿命,垫板74和弧形盖板75采用鞋底常用的塑胶材料制成,提高行走的舒适性,防止框架23全金属制成在空翻时损坏地面。
33.如图3和图4所示,倾倒方向检测模块包括头盔1和头盔1内的加速度方向感应装置12;头盔内部设有内衬10,内衬10和头盔之间形成空腔1,加强度方向感应装置设置在空腔11内部。加速度方向感应装置12采用加速度传感器,倾斜判断模块采用固定在头盔1内部的若干个加速度传感器,加速度传感器设有四个。四个加速度传感器绕头盔1轴线圆周阵列设置。头盔1内设有配合加速度传感器的独立电源,独立电源可采用能够拆卸更换的纽扣电池。
34.腾空检测模块包括位于框架23底部的若干个压力传感器21;压力传感器21自带电源,压力传感器21设有两个,两个压力传感器21分别位于腾空检测模块的前后两端。两个压力传感器21同时检测不到人体压力时才会判定人体腾空,防止人体只是踮脚而造成误判,保证装置的可靠性,延长装置的使用寿命。框架23底部在弹性框71之间填充设有防滑软垫222,压力传感器21位于防滑软垫222和框架23之间,防滑软垫在对应喷气口位置设有内陷的缩颈225,缩颈能够减少喷气口气体回流,提高进气口的进气能力,提高助力模块辅助人体转向的可靠性。防滑软垫222提高框架23的行走舒适性,并且能够防止弹性减震机构7变形过量而造成损坏,防滑软垫222采用发泡材料制成,增强框架23的抓地力。垫板74的下端面的高度比防滑软垫222的下端面的高度高两毫米。
35.倾倒方向检测模块、助力模块2和腾空检测模块电性连接一控制电路模块3。控制电路模块3可以内嵌在头盔1或框架23内,还可以是独立的外部控制,可设计为app在手机上控制,倾倒方向检测模块、助力模块2和腾空检测模块均设有配合控制电路模块3的无线信号收发器。控制电路模块3的控制逻辑如图10所示,通过腾空检测模块判断人体是否腾空跳起离地,进行起跳判断;在检测到人体腾空离地后,头盔1内的加速度方向感应装置12通过惯性作用检测到人体头部朝向,从而判断人体的空翻方向,在确定人体空翻方向后,助力模块2背对头盔1倾倒方向的一侧工作,助力模块2的驱动电机26运行,根据空翻方向的判断结果打开对应朝向的进气口,进气口进气的同时,喷气口喷气,辅助完成人体的空翻,在通过头盔1内的加速度传感器判断人体头部是否到达最低位置,在人体头部到达最低位置时,驱动电源6停止供电,助力模块2停止。
36.助力模块2在组装时,先在框架23内设置配合驱动电机26的驱动电源6,框架23朝下一端设有喷气口和喷气腔24,喷气腔24内固定设置电机架25,电机架25上预装驱动电机26、控制阀门和控制阀杆205,之后通过螺钉固定电机架25和喷气腔24,再安装驱动叶片到电机的电机轴27上。喷气口上粘接设置过滤网223,可采用ab胶粘接后,再通过螺钉加紧固定;在框架23底部嵌入固定设置压力传感器21后,最后在垫板74的底部安装防滑软垫222以起到减震作用。滑动槽790两侧的框架23采用螺钉和柱销配合连接的两半式拼接结构,预转螺钉和柱销,在滑动头79和滑动槽790配合后再螺钉锁紧框架23,完成弹性框71和框架23的固定连接。
37.空翻时通过弹性减震模块来降低落地时的振动,同时通过弹性减震模块能够提供初始空翻时的弹力,进一步方便完成空翻,通过助力模块2和倾倒方向检测模块的配合,穿戴本技术能够使身体素质或体型较胖的人员完成空翻,甚至是连续空翻,可玩性好;能够完
成空翻时的辅助助力,穿戴式使用,降低空翻的门槛,并且兼具安全防护的作用。需要明确的是,本发明公开的装置用于降低空翻转体,提高辅助力,但本身还需要使用者自身的力量,并不是自动带动人体完成空翻。
38.驱动电机26能够带动驱动叶片转动,从而实现鼓风,在头盔1内的加速度方向感应装置12检测并判断人体倾倒方向后,控制电路模块3控制与头盔1倾倒方向相背侧的阀芯打开,阀芯打开的进气口220能够向内喷气,对人体向外的翻转力,喷气孔同时向外喷气,提高人体滞空能力,进而完成空翻;阀芯与阀杆205连接,电磁夹爪29在通电时能够夹紧从而使齿条203与传动齿轮28配合,电磁电机的电机轴27转动能够阀杆205直线移动,在需要关闭阀芯时,电磁夹爪29断电,复位弹簧204能够带动齿条203所在的夹爪复位,在喷气腔24内的气流作用下,阀芯会自动复位;从而实现阀芯的单个独立开关控制,阀芯的控制可靠方便,而且由于阀杆205、电磁夹爪29都为长杆状,对于喷气腔24内的空间的利用好,且对气流的影响小,更有利于喷气的进行。由于空翻时人体腾空,助力模块2相对人体重心具有半人身高的力臂,因此,进气口220只需提供较小的力就能完成人体空翻时的助力转动,而向上的动力主要由弹性波浪板72提供,因此对于驱动电机26的动力需求较低,驱动电源6可采用嵌入设置体积较小的锂电池,能够充电再利用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1