一种神经外科膝部关节疼痛性病变康复训练方法与流程
1.本发明涉及医疗器械领域,特别涉及一种神经外科膝部关节疼痛性病变康复训练方法。
背景技术:
2.膝痛是非常常见的问题,尤其常见于过度运动、软骨磨损或骨关节炎等。处理膝痛离不开臀部和腿部肌肉力量的加强。像髌骨软化、髌股关节软骨损伤、髌骨上下两极的疼痛性病变等均可通过强化臀部和腿部肌肉力量来予以改善。
3.在常见的强化康复训练中,靠墙静蹲是一种简便易行、无需他人辅助、对环境依赖较小的训练方法。只要姿势准确,训练得当,可以方便而有效的锻炼腿部肌肉。训练时,患者背部贴紧墙面,双足分开,与肩同宽,小腿逐渐向前伸,和身体重心之间形成一定距离,大概40
‑
50公分。此时身体已经呈现出下蹲的姿势,使小腿与地面垂直,大腿与小腿呈90
°
夹角。夹角不能过小,过小时,下蹲的太深,会明显增加髌股关节的压力,也无法对大腿肌肉力量产生锻炼效果。小腿要与地面保持垂直,防止膝盖内扣,膝盖内扣会导致下肢力线排列不正确,增加膝盖压力,不仅无法达到有效的训练效果,且会加重病情。
4.然而患者在训练时,背部靠墙容易污染衣物;由于不同患者耐受力不同,当大腿与小腿直接呈90
°
时,腿部肌肉不足以支撑身体重量,此时为了获得足够的支撑力,患者会不自觉地小腿施力,将身体向墙面方向推送以增加背部与墙面间的摩擦力,以提供足够的支撑力,降低对腿部肌肉的负担,这就导致腿部肌肉没有得到充分训练、小腿不正确施力。而对于训练后期的患者,需进行加强训练时,由于背部和墙面间摩擦力的存在,且该摩擦力无法有效调节,使得除了延长训练时间外,对于训练强度无法有效调节。两种情况不论哪种都会导致训练效果较差。
技术实现要素:
5.本发明提供一种神经外科膝部关节疼痛性病变康复训练方法,可以解决现有技术中膝部关节疼痛性病变康复训练效果较差的问题。
6.一种神经外科膝部关节疼痛性病变康复训练方法,其特征在于,基于一康复训练装置,所述训练装置包括:
7.支撑装置,其包括支架,所述支架竖直设置,所述支架上开设有一调节槽;
8.靠板,所述靠板可上下滑动地设置在所述调节槽内,所述靠板朝向所述支架的一侧可转动地设置有辊轴,所述辊轴与所述支架相抵触,以产生摩擦力;
9.调节装置,设置在所述支架上,用于调节所述辊轴与所述支架之间的摩擦力;
10.所述训练方法包括:
11.s1,使用者背部贴紧靠板,使小腿与地面垂直,大腿与小腿呈90
°
夹角;
12.s2,通过调节装置调节所述辊轴与所述支架之间的摩擦力大小,进行静蹲训练即可。
13.更优地,所述调节装置包括电磁铁、伸缩弹簧、驱动轴和阻力轮,所述支架上开设有收纳孔,所述电磁铁固定设置在所述收纳孔内,所述收纳孔和所述驱动轴的横截面均为多边形结构,所述驱动轴可滑动地设置在所述收纳孔内;所述伸缩弹簧一端连接至所述电磁铁、另一端连接至所述驱动轴,所述电磁铁通电时,吸附所述驱动轴,所述阻力轮固定设置在所述驱动轴上;所述辊轴上同轴设置有摩擦轴,所述阻力轮与所述摩擦轴相对应,所述电磁铁未通电时,所述伸缩弹簧带动所述阻力轮抵紧在所述摩擦轴上,所述阻力轮抵靠至所述摩擦轴时,具有阻止所述摩擦轴转动的趋势;
14.所述s2包括:
15.s21,当需要支撑性训练时,使所述电磁铁断电,所述伸缩弹簧带动所述驱动轴进而带动所述阻力轮抵紧在所述摩擦轴上,使所述摩擦轴无法产生转动,进而增大辊轴与支架之间的摩擦力;
16.s22,当需要强化训练时,使所述电磁铁通电并根据需要调节电流大小,所述电磁铁通电时吸附所述驱动轴,使所述驱动轴朝向电磁铁方向移动,使所述阻力轮与所述摩擦轴之间的压力减小或使所述阻力轮与所述摩擦轴完全脱离,以使所述辊轴易于转动。
17.更优地,所述康复训练装置还包括矫正装置,其包括座板、定位板、第一压力传感器和第二压力传感器;所述座板固定设置在所述靠板上,所述座板上设置有两组第一压力传感器,每组两个,四个所述第一压力传感器呈矩形分布;所述定位板为两个,两个所述定位板上分别设置有两个第二压力传感器,所述定位板上的两个所述第二压力传感器沿竖直方向布置;四个所述第一压力传感器用于检测使用者大腿是否处于水平状态,四个所述第二压力传感器用于检测使用者小腿是否处于竖直状态;
18.所述s1包括:
19.s11,使用者背部贴紧所述靠板,臀部位于所述座板上,使小腿与地面垂直,大腿与小腿呈90
°
夹角,使两个大腿分别压在两组所述第一压力传感器上;使两个小腿分别抵紧在两个所述定位板上的所述第二压力传感器上;
20.s12,当所述第一压力传感器和所述第二压力传感器均检测到压力信号时,判断为姿态正确;当任意一所述第一压力传感器和/或所述第二压力传感器未检测到压力传感器时,判断为姿态不正确。
21.更优地,所述支撑装置还包括底盘,所述底盘固定设置在所述支架上,所述定位板固定设置在所述底盘上。
22.更优地,所述支撑装置还包括底盘,所述底盘固定设置在所述支架上;还包括腿部调节器,其包括电动伸缩杆和支撑板,所述支撑板可滑动地设置在所述底盘上,所述定位板固定设置在所述支撑板上,所述电动伸缩杆固定设置在所述底盘上,用于驱动所述支撑板移动。
23.更优地,所述康复训练装置还包括控制装置,其包括处理器、外部输入装置和提醒装置,所述提醒装置、所述电动伸缩杆、所述第一压力传感器、所述第二压力传感器、所述电磁铁和所述外部输入装置均信号连接至所述处理器;
24.所述s11包括:使用者背部贴紧所述靠板,臀部位于所述座板上,使小腿与地面垂直,大腿与小腿呈90
°
夹角,使两个大腿分别压在两组所述第一压力传感器上;使两个小腿分别抵紧在两个所述定位板上的所述第二压力传感器上;
25.所述s12包括:当所述第一压力传感器和所述第二压力传感器均检测到压力信号时,发送至所述处理器,所述处理器判断为姿态正确,通过所述提醒装置提醒用户可以开始训练;当任意一所述第一压力传感器和/或所述第二压力传感器未检测到压力传感器时,判断为姿态不正确,通过所述提醒装置提醒用户;
26.所述训练方法还包括:
27.s3,所述处理器判断为姿态正确后,当所述处理器监测到任意一所述第一压力传感器和/或所述第二压力传感器的压力信号值为零时,判断为姿态异常,所述处理器控制所述提醒装置提醒用户矫正姿态。
28.更优地,所述靠板上喷涂有橡胶涂层,用于增大靠板与背部的摩擦力。
29.本发明提供一种神经外科膝部关节疼痛性病变康复训练方法,通过靠板,可以实现支撑作用,方便清理;调节装置可以调节辊轴与支架之间的摩擦力,当患者腿部力量不足时,通过增大摩擦力,提供有效支撑;当患者需要强化训练时,可以降低摩擦力,从而更加有效的训练腿部肌肉,方便调节。
附图说明
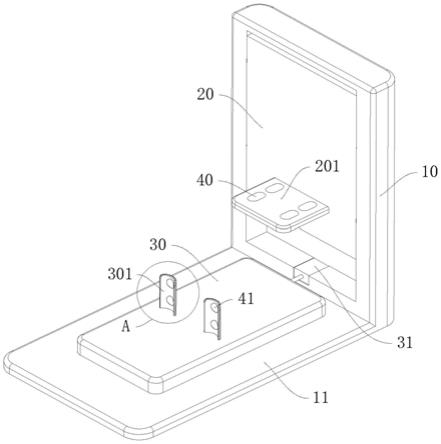
30.图1为本发明提供的一种神经外科膝部关节疼痛性病变康复训练方法的结构示意图;
31.图2为图1中a处局部放大图;
32.图3为图1的俯视图;
33.图4为图3中b
‑
b剖视图;
34.图5为靠板的结构示意图;
35.图6为图4中c
‑
c剖视图;
36.图7为图6中d处局部放大图;
37.图8为本发明提供的一种神经外科膝部关节疼痛性病变康复训练方法的系统原理图。
38.附图标记说明:
39.10支架;11底盘;20靠板;201座板;202定位座;21辊轴;211摩擦轴;30支撑板;31电动伸缩杆;301定位板;40第一压力传感器;41第二压力传感器;50阻力轮;51驱动轴;52电磁铁;53伸缩弹簧。
具体实施方式
40.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
41.实施例一:
42.如图1所示,本发明实施例提供的一种神经外科膝部关节疼痛性病变康复训练方法,基于一康复训练装置,该康复训练装置包括支撑装置、靠板20和调节装置,其中,靠板20用于模拟墙体,用于对人体形成支撑,支撑装置作为基础支撑主体,用于其他部件的安装,调节装置用于实现调节功能。
43.支撑装置包括支架10,支架10大致呈矩形板状结构,支架10竖直设置,支架10上开
设有一调节槽,用于安装靠板20;
44.靠板20可上下滑动地设置在调节槽内,调节槽内开设有一滑槽,靠板20的两侧固定设置有与滑槽相配合的滑块,使得靠板20只能沿调节槽上下滑动,靠板20朝向支架10的一侧可转动地设置有辊轴21,具体的,如图5所示,靠板20朝向支架10的一侧固定设置有定位座202,辊轴21可转动地设置在定位座202上,辊轴21与支架10相抵触,以产生摩擦力,可以理解的是,定位座202在朝向靠板20方向上在水平面内的投影小于辊轴21的投影,以使得定位座202不会干涉辊轴21与靠板20的接触;
45.调节装置设置在支架10上,用于调节辊轴21与支架10之间的摩擦力。
46.具体的,如图6和图7所示,调节装置包括电磁铁52、伸缩弹簧53、驱动轴51和阻力轮50,支架10上开设有收纳孔,电磁铁52固定设置在收纳孔内,收纳孔和驱动轴51的横截面均为多边形结构,驱动轴51可滑动地设置在收纳孔内,多边形结构可以使得驱动轴51能够沿收纳孔滑动、但无法沿收纳孔转动;伸缩弹簧53一端连接至电磁铁52、另一端连接至驱动轴51,辊轴21上同轴设置有摩擦轴211,阻力轮50与摩擦轴211的位置相对应,阻力轮50抵靠至摩擦轴211时,具有阻止摩擦轴211转动的趋势。
47.电磁铁52通电时,吸附或排斥驱动轴51,可以理解的是,当驱动轴51采用磁吸性材料制成时,电磁铁52通电时产生磁场,吸附驱动轴51,此时伸缩弹簧53在电磁铁52未通电时,呈压缩状态,使得阻力轮50抵触在摩擦轴211上,阻止摩擦轴211转动,而当电磁铁52通电后,吸附驱动轴51,驱动轴51朝向电磁铁52方向移动,此时阻力轮50和摩擦轴211之间摩擦力减小或因产生间隔无法接触而使得阻力消失,此时摩擦轴211易于转动或不再受到阻力轮50的影响;而当驱动轴51采用磁性材料制成时,电磁铁52通电时产生磁场且电磁铁52与驱动轴51相对的一端极性相同,排斥驱动轴51,此时当电磁铁52未通电时,伸缩弹簧53呈自然状态,阻力轮50与摩擦轴211相脱离,当电磁铁52通电后,排斥并推动驱动轴51,带动阻力轮50和摩擦轴211相抵触,使得摩擦轴211转动阻力变大,进而使得辊轴21与靠板20之间的摩擦力变大;当然,可以理解的是,不论采用何种方式,只要能够实现阻力轮50和摩擦轴211之间的阻力(摩擦力)实现变化,进而影响辊轴21转动时的阻力均可。
48.训练方法包括:
49.s1,使用者背部贴紧靠板20,使小腿与地面垂直,大腿与小腿呈90
°
夹角;
50.s21,当需要支撑性训练时,使所述电磁铁52断电,所述伸缩弹簧53带动所述驱动轴51进而带动所述阻力轮50抵紧在所述摩擦轴211上,使所述摩擦轴211无法产生转动,进而增大辊轴21与支架10之间的摩擦力;
51.s22,当需要强化训练时,使所述电磁铁52通电并根据需要调节电流大小,所述电磁铁52通电时吸附所述驱动轴51,使所述驱动轴51朝向电磁铁52方向移动,使所述阻力轮50与所述摩擦轴211之间的压力减小或使所述阻力轮50与所述摩擦轴211完全脱离,以使所述辊轴21易于转动。
52.实施例二:
53.由于训练时重心离小腿靠后(也即小腿与墙体之间的位置),不同患者的耐受力不同,训练时重心下垂会导致大腿与小腿不自觉的夹角变小,使得患者处于不正确的训练姿势;训练时由于膝盖内扣状态下患者更易于使身体处于稳定状态,因此患者训练时还会不自主的使得膝盖内扣,以便获得更稳定的支撑性,但是这种方式会导致训练姿势不正确,训
练效果较差、容易加重膝盖损伤,因此本实施例中,在实施例一的基础上,如图1至图4所示,还包括矫正装置,其包括座板201、定位板301、第一压力传感器40和第二压力传感器41;座板201固定设置在靠板20上,用于支撑臀部,座板201上设置有两组第一压力传感器40,每组两个,四个第一压力传感器40呈矩形分布;定位板301为两个,分别用于对应患者两个小腿部位,两个定位板301上分别设置有两个第二压力传感器41,定位板301上的两个第二压力传感器41沿竖直方向布置;四个第一压力传感器40用于检测使用者大腿是否处于水平状态,四个第二压力传感器41用于检测使用者小腿是否处于竖直状态。其中,定位板301可优选的采用弧形板,以便更好的贴合小腿的形状。
54.训练时,使用者两个大腿分别位于两组第一压力传感器40上,当每组中的两个第一压力传感器40同时检测到压力信号时,判定为该位置的大腿呈水平状态,否则判定为大腿呈非正确姿势;而定位板301上的两个第二压力传感器41同时检测到压力信号时,判定为小腿呈竖直状态,否则判定为小腿呈非正确姿势,当小腿判定为竖直状态且大腿判定为水平状态时,整体判定为大腿和小腿呈90
°
状态,否则判定为非正确姿态。
55.进一步地,支撑装置还包括底盘11,底盘11固定设置在支架10上,定位板301固定设置在底盘11上。
56.进一步地,由于身高、腿长的不同,在调整至正确姿态下,不同使用者小腿的位置不同,因此支撑装置还包括底盘11,底盘11固定设置在支架10上;还包括腿部调节器,其包括电动伸缩杆31和支撑板30,支撑板30可滑动地设置在底盘11上,定位板301固定设置在支撑板30上,电动伸缩杆31固定设置在底盘11上,用于驱动支撑板30移动。
57.进一步地,还包括控制装置,其包括处理器和外部输入装置,外部输入装置用于输入控制指令,电动伸缩杆31、第一压力传感器40、第二压力传感器41、电磁铁52和外部输入装置均信号连接至处理器。可以理解的是,为了方便实现提醒,还可以包括报警装置,报警装置可以为蜂鸣器、灯光报警器等,报警装置信号连接至处理器。
58.进一步地,由于工作时,需要调节的是靠板20与支架10之间的摩擦力(也即辊轴21与支架10之间的摩擦力),而使用者后背与靠板20之间需要保持相对静止,不能易于滑动,否则靠板20将无法有效工作,因此靠板20上喷涂有橡胶涂层,该涂层采用较高的表面粗糙度,以便增大后背与靠板20之间的摩擦力。
59.上述s1具体包括:
60.s11,使用者背部贴紧所述靠板20,臀部位于所述座板201上,使小腿与地面垂直,大腿与小腿呈90
°
夹角,使两个大腿分别压在两组所述第一压力传感器40上;使两个小腿分别抵紧在两个所述定位板301上的所述第二压力传感器41上;
61.s12,当所述第一压力传感器40和所述第二压力传感器41均检测到压力信号时,发送至所述处理器,所述处理器判断为姿态正确,通过所述提醒装置提醒用户可以开始训练;当任意一所述第一压力传感器40和/或所述第二压力传感器41未检测到压力传感器时,判断为姿态不正确,通过所述提醒装置提醒用户;
62.上述训练方法还包括:
63.s3,所述处理器判断为姿态正确后,当所述处理器监测到任意一所述第一压力传感器40和/或所述第二压力传感器41的压力信号值为零时,判断为姿态异常,所述处理器控制所述提醒装置提醒用户矫正姿态。
64.工作时:
65.患者使背部抵靠在靠板20上,臀部大致位于座板201处,使两个大腿分别大致位于两组第一压力传感器40处;两个小腿分别大致位于两个定位板301处,调整好姿态;
66.依靠背部移动调整靠板20位置,使大腿分别压在两组第一压力传感器40上,调整支撑板30的位置,使小腿位于定位板301处,使小腿抵紧在第二压力传感器41上;当底板上的两组第一压力传感器40均检测到信号并发送至处理器,且每个定位板301上的两个第二压力传感器41均检测到压力信号并发送至处理器,处理器判断此时使用者已处于准确的姿态,开始进行训练;
67.当需要调节训练强度时,通过外部输入装置输入控制指令,处理器接收控制指令控制电磁铁52通断电以及电流大小,进而控制磁场强度,当电磁铁52磁场强度变化时,控制阻力轮50和摩擦轴211的接触情况,当阻力轮50抵紧在摩擦轴211上时,阻力轮50和摩擦轴211之间产生摩擦力,阻力轮50阻止摩擦轴211的转动趋势(不一定完全阻止摩擦轴211的转动,具有阻止的趋势即可,当然也可以完全阻止摩擦轴211的转动,使辊轴21和支架10之间呈完全滑动摩擦或静摩擦),摩擦轴211转动难度加大时,辊轴21转动难度同步加大,此时辊轴21和支架10之间的摩擦力变大(由滚动摩擦变为静摩擦或滑动摩擦或部分滚动部分滑动摩擦),此时靠板20起到一定的辅助支撑作用。当需要强化训练时,则进一步通过电磁铁52控制驱动轴51移动,降低阻力轮50与摩擦轴211之间的接触程度,直至两者完全脱离,此过程中,辊轴21和支架10之间的摩擦力逐渐变小直至辊轴21和支架10之间完全为滚动摩擦(正常训练时,患者背部未移动时,辊轴21和之间之间为静摩擦,一旦移动则会带动靠板20移动进而带动辊轴21转动使辊轴21与支架10之间产生滚动摩擦,未采用康复装置时,患者背部抵靠在墙面上且背部移动时为滑动摩擦,较辊轴21与支架10之间完全的滚动摩擦的摩擦力要大,因此可以起到强化训练的作用)。
68.而当训练过程中,患者不自觉的改变了训练姿态时,如小腿弯曲与大腿之间夹角过小,或膝部内扣,均会导致第一压力传感器40和/或第二压力传感器41信号的变化,一旦检测到信号变化,第一压力传感器40和/或第二压力传感器41会发送信号至处理器,处理器接收信号,通过报警装置提醒使用者注意姿态。
69.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1