一种用于高尔夫球的捡球装置及收检机器人
1.本发明涉及夹持设备技术领域,具体涉及一种用于高尔夫球的捡球装置及收检机器人。
背景技术:
2.高尔夫运动是一种能够把享受大自然乐趣和体育锻炼融为一体的阳光运动。高尔夫球与乒乓球和排球等质轻球相比具有质量较重的特点。当人们在高尔夫球场打高尔夫球球时,将需要对高尔夫球内的球进行捡球。
3.目前,对高尔夫球的捡球方式通常采用人工的方式进行捡球,同时,如中国公开号为cn107115637a公开的一种基于视觉的高尔夫捡球机器人,包括依次设置的捡球装置和装球箱体,以及设置在装球箱体内的主控mcu、供电单元和牵引单元;所述捡球装置顶部还设有打球装置,打球装置顶部设有视觉检测装置;所述装球箱体上设有捡球机械手臂,装球箱体上还设有用于捡球机械手臂捡球后将球投入装球箱体的开口,装球箱体底部、与捡球机械手臂相近的一端还设有放球装置;所述打球装置、视觉检测装置、捡球机械手臂、放球装置、供电单元和牵引单元均与主控mcu相连。
4.然而,以上的捡球机器人拾球的高度和宽度是固定的,能够实现对位于平面散落的高尔夫球进行回收。但是,现有的高尔夫球捡球机器人不能把高尔夫球放置在高尔夫球架上,也不能对高尔夫球架进行移动,不便于高尔夫球的放置。同时,当高尔夫球位于处于曲折不平的地面时,现有的高尔夫球抓球装置不能高效的实现对高尔夫球进行抓取,使得现有的机器人捡球的使用效率低的情况。
技术实现要素:
5.针对现有技术存在的不足,本发明提出一种用于高尔夫球的捡球装置,以解决现有的高尔夫球抓球装置不能高效的实现对高尔夫球进行抓取,使得现有的机器人捡球的使用效率低的问题。
6.为达到上述目的,本发明采用如下技术方案:一种用于高尔夫球的捡球装置,包括架体、升降机构和抓球机构;所述升降机构包括升降架和传动组件,所述升降架的底端固定安装于所述架体上,所述传动组件具有滑动部,所述滑动部滑动安装于所述升降架上,滑动部沿升降架的高度方向滑动;所述抓球机构包括固定板、驱动组件和夹持组件,所述固定板固定安装于所述滑动部上;所述驱动组件的固定端安装于所述固定板上,驱动组件具有两个移动部,两个所述移动部能够相对移动;所述夹持组件包括第一夹持部和第二夹持部,所述第一夹持部和第二夹持部分别安装于两个所述移动部上。
7.采用上述技术方案时,架体放置在地面上,启动传动组件,传动组件的滑动部在升降架上滑动,使得第一夹持部和第二夹持部贴近地面。再启动驱动组件,驱动组件的移动部在固定板上相对移动,进而通过移动部带动第一夹持部和第二夹持部相对移动,从而实现能够适应不同的场地进行高效的抓取高尔夫球。
8.优选的,所述传动组件包括升降电机、转动轮和传送带;所述滑动部为滑块,所述滑块滑动安装于所述升降架上,滑块的背离所述升降架的一端与所述固定板固定连接;所述升降电机的底端固定安装于所述架体上,且位于所述升降架的背离所述抓球机构的一侧,所述转动轮设有两个,两个转动轮分别转动安装于所述升降架的顶端和底端,所述升降电机用于驱动所述转动轮转动,所述传送带张紧安装于两个所述转动轮上,传送带用于带动所述滑块滑动。
9.优选的,所述传动组件还包括主齿轮和从齿轮,所述主齿轮固定安装于所述升降电机的转轴上,所述从齿轮固定安装于两个所述转动轮中的一个转动轮上,所述主齿轮与所述从齿轮啮合。
10.优选的,所述驱动组件还包括驱动舵机和驱动齿轮;所述驱动舵机的固定端安装于所述固定板上,驱动齿轮与所述驱动舵机的转动轮固定连接,两个所述移动部分别安装于所述驱动齿轮的顶端和底端,两个移动部均与所述驱动齿轮啮合。
11.优选的,所述移动部包括齿条,所述齿条与所述驱动齿轮啮合。
12.优选的,所述第一夹持部和第二夹持部均包括支撑板和夹持板,所述支撑板的固定端安装于所述齿条上,支撑板的自由端向背离所述升降机构的一端延伸,所述夹持板固定安装于所述支撑板的自由端,位于第一夹持部的夹持板和位于第二夹持部的夹持板贴合后形成套筒。
13.优选的,所述抓球机构还包括限位组件和限位板,所述限位组件安装于所述固定板上,且位于所述驱动组件的顶端,所述限位板的转动端转动安装于所述固定板的底端,限位板能够与所述套筒的筒口相对,限位组件的牵引端与所述限位板连接,用于带动所述限位板转动。
14.优选的,所述限位组件包括转动电机、转动杆和拉绳,所述转动电机安装于所述固定板上,且位于所述驱动组件的顶端,所述转动杆与所述转动电机的转动轮固定连接,所述拉绳的两端分别与所述限位板和所述转动杆固定连接。
15.优选的,还包括视觉机构,所述视觉机构包括摄像头、视觉舵机和控制器,所述视觉舵机安装于所述固定板上,且位于所述抓球机构的顶端,所述摄像头安装于所述视觉舵机的转轴上,摄像头形成采集信号,所述视觉舵机、摄像头、升降电机和驱动舵机分别与所述控制器电连接,所述控制器安装于所述架体上,控制器分别能够控制视觉舵机、升降电机和驱动舵机的关闭和启动,且用于处理采集信号。
16.本发明还提供一种用于高尔夫球的收检机器人,包括以上所述的用于高尔夫球的捡球装置和移动机构;所述移动机构包括摆动电机、驱动电机和轮子,所述摆动电机和所述驱动电机均安装于所述架体的底端,所述摆动电机的转动轮与所述驱动电机连接,所述驱动电机的转动轮与所述轮子固定连接。
17.通过在架体的底部安装摆动电机、驱动电机和轮子,启动摆动电机和驱动电机,驱
动电机驱动轮子转动,摆动电机实现轮子角度的转动,从而实现对高尔夫球场地中的不同形式的地面上散落的高尔夫球进行抓取,通过对抓球机构的高度进行调整,从而实现把高尔夫球放置在高尔夫球架上。
18.本方案产生的有益效果是:1、通过升降机构和抓球机构的设置,启动升降机构中的传动组件和驱动组件,传动组件的滑动部在升降架上滑动,从而实现对抓球机构的高度进行调整,便于对不同高度的高尔夫球进行抓取。同时,启动驱动组件,两个移动部在固定板上相对移动,通过两个移动部分别带动第一夹持部和第二夹持部对地面上的高尔夫球进行夹持,从而实现能够快速的捡起地面上的高尔夫球。
19.2、通过视觉机构中摄像头、视觉舵机和控制器的设置,启动视觉舵机,通过视觉舵机对摄像头的方向进行控制,进而使得地面上不同颜色的高尔夫球通过摄像头进行采集,形成采集信号,控制器对采集信号进行处理,从而控制升降电机和驱动舵机的关闭和启动,从而能够自动捡起对地面上的高尔夫球。
20.3、通过摆动电机、驱动电机和轮子的设置,驱动电机驱动轮子转动,摆动电机实现轮子角度的转动,不仅能够移动捡球装置对高尔夫球场地中的不同形式的地面上散落的高尔夫球进行抓取。而且,通过调整抓球机构的高度,从而实现把高尔夫球放置在高尔夫球架上。
21.4、通过转动电机、转动杆和拉绳的设置。驱动电机带动转动杆向下转动,使得限位板带动拉绳向下移动,限位板位于套筒的底端,不仅实现对高尔夫球进行支撑,而且,限位板还能够将高尔夫球架托起,两个夹持板夹住球架,从而实现对整体的高尔夫球架进行移动。
附图说明
22.为了更清楚地说明本发明具体实施方式,下面将对具体实施方式中所需要使用的附图作简单地介绍。在所有附图中,各元件或部分并不一定按照实际的比例绘制。
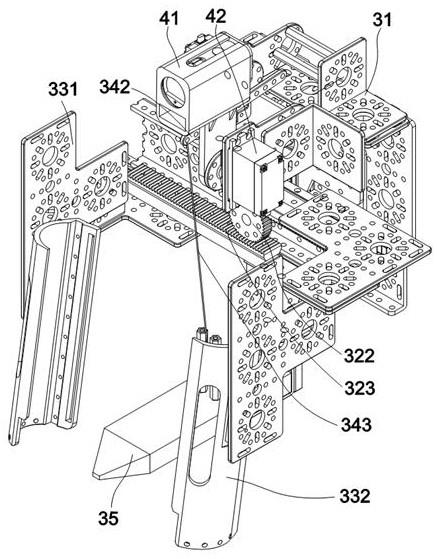
23.图1为本发明一种用于高尔夫球的捡球装置中抓球机构的结构示意图;图2为本发明一种用于高尔夫球的捡球装置中抓球机构的正视的结构示意图;图3为本发明一种用于高尔夫球的捡球装置及用于高尔夫球的收检机器人的正视的结构示意图;图4为本发明一种用于高尔夫球的捡球装置及用于高尔夫球的收检机器人的俯视的结构示意图;图5为本发明一种用于高尔夫球的捡球装置及用于高尔夫球的收检机器人的仰视的结构示意图;图6为本发明一种用于高尔夫球的捡球装置及用于高尔夫球的收检机器人的右侧的结构示意图。
24.附图标记:架体1;升降机构2、升降架21、传动组件22、升降电机221、转动轮222、传送带223、主齿轮224、从齿轮225;
抓球机构3、固定板31、驱动组件32、驱动舵机321、驱动齿轮322、齿条323、夹持组件33、支撑板331、夹持板332、限位组件34、转动电机341、转动杆342、拉绳343、限位板35;视觉机构4、摄像头41、视觉舵机42、控制器43;移动机构5、摆动电机51、驱动电机52、轮子53。
具体实施方式
25.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
26.实施例一请参阅图1-图6,一种用于高尔夫球的捡球装置包括架体1、升降机构2和抓球机构3。
27.其中,升降机构2包括升降架21和传动组件22,升降架21的底端固定安装于架体1上,传动组件22具有滑动部,滑动部滑动安装于升降架21上,滑动部沿升降架21的高度方向滑动。本实施例中,滑动部为滑块,滑块滑动安装于升降架21上。滑块便于安装在升降架21上。
28.具体的,传动组件22包括升降电机221、转动轮222、传送带223、主齿轮224和从齿轮225。升降电机221的底端固定安装于架体1上,且位于升降架21的背离抓球机构3的一侧。主齿轮224固定安装于升降电机221的转轴上,从齿轮225固定安装于两个转动轮222中的一个转动轮222上,主齿轮224与从齿轮225啮合。本实施例中,转动轮222设有两个,两个转动轮222分别转动安装于升降架21的顶端和底端,从齿轮225固定安装于位于升降架21的底端的转动轮222上,升降电机221通过主齿轮224和从齿轮225驱动转动轮222转动,传送带223张紧安装于两个转动轮222上,转动轮222转动带动传送带223移动。传送带223的带面与滑块固定连接,或者传送带223的带面通过固定杆与滑块连接,从而使得传送带223带动滑块滑动。
29.其中,抓球机构3包括固定板31、驱动组件32和夹持组件33。固定板31通过焊接的方式固定安装于滑块的背离升降架21的一端上。从而实现滑块带动固定板31移动。
30.驱动组件32的固定端安装于固定板31上,驱动组件32具有两个移动部,两个移动部能够相对移动。
31.具体的,驱动组件32还包括驱动舵机321和驱动齿轮322。驱动舵机321的固定端安装于固定板31上,驱动齿轮322与驱动舵机321的转轴固定连接,两个移动部分别安装于驱动齿轮322的顶端和底端,两个移动部均与驱动齿轮322啮合。驱动舵机321启动后,驱动舵机321驱动驱动齿轮322转动,从而实现驱动齿轮322带动两个移动部移动,实现两个移动部相对的移动。本实施例中,移动部选用齿条323,齿条323与驱动齿轮322啮合,两个齿条323分别位于驱动齿轮322的顶端和底端,实现驱动齿轮322驱动两个齿条323沿固定板31的水平方向相对移动。
32.其中,夹持组件33包括第一夹持部和第二夹持部,第一夹持部和第二夹持部分别安装于两个齿条323上。
33.具体的,请一并参阅图1和图2,第一夹持部和第二夹持部均包括支撑板331和夹持
板332,支撑板331的固定端安装于齿条323上,支撑板331的自由端向背离升降机构2的一端延伸,夹持板332固定安装于支撑板331的自由端,位于第一夹持部的夹持板332和位于第二夹持部的夹持板332贴合后形成套筒。
34.支撑板331对夹持板332进行支撑,同时,通过两条齿条323分别带动支撑板331和夹持板332相对移动,从而实现两个夹持板332形成的套筒对高尔夫球进行夹紧,从而实现对高尔夫球进行抓取。
35.以上的技术方案,启动升降电机221,升降电机221转动,从而依次使得主齿轮224、从齿轮225和转动轮222转动,从而实现转动轮222转动带动传送带223转动,传送带223带动滑块动,从而实现滑块带动固定板31在升降架21上滑动,从而实现对抓球机构3的高度进行调整,便于对不同高度的高尔夫球进行抓取。同时,启动驱动舵机321,驱动舵机321驱动驱动齿轮322转动,驱动齿轮322带动两个齿条323进行相对的水平移动,使得两条齿条323分别带动与其相连接的支撑板331和夹持板332相对移动,从而实现两个夹持板332形成的套筒对高尔夫球进行夹紧,从而实现对高尔夫球进行抓取,从而实现能够快速和精确的捡起地面上的高尔夫球。
36.实施例二在实施例一的基础上,本实施例中,请一并参阅图1和图2,抓球机构3还包括限位组件34和限位板35,限位组件34安装于固定板31上,且位于驱动组件32的顶端,限位板35的转动端转动安装于固定板31的底端,限位板35能够与套筒的筒口相对,限位组件34的牵引端与限位板35连接,用于带动限位板35转动。限位组件34带动限位板35移动,使得限位板35能够对套筒内的高尔夫球进行支撑,能更好地避免高尔夫球从套筒内滑出。限位板35还能够将高尔夫球架托起,两个夹持板332夹住球架,从而能够实现对整体的高尔夫球架进行高度方向的移动。同时,在限位板35上还能够设置限位柱,限位柱位于套筒与固定板31之间,通过限位柱能够实现对高尔夫球或高尔夫球架进行限位。
37.具体的,限位组件34包括转动电机341、转动杆342和拉绳343,转动电机341安装于固定板31上,且位于驱动组件32的顶端,转动杆342与转动电机341的转轴固定连接,拉绳343的两端分别与限位板35和转动杆342固定连接。
38.启动驱动电机52,驱动电机52带动转动杆342向下转动,使得拉绳343向下,限位板35受到重力的作用,向下转动,使得限位板35位于套筒的底部,实现对高尔夫球进行支撑,同时,当把高尔夫球放置在球架后,支撑板331还能够将球架托起,两个夹持板332夹住球架,从而实现对整体球架的搬运。
39.实施例三在实施例一和实施例二的基础上,本实施例中,请一并参阅图1,还包括视觉机构4,视觉机构4包括摄像头41、视觉舵机42和控制器43,视觉舵机42安装于固定板31上,且位于抓球机构3的顶端,摄像头41安装于视觉舵机42的转轴上,摄像头41形成采集信号,视觉舵机42、摄像头41、升降电机221和驱动舵机321分别与控制器43电连接,控制器43安装于架体1上,控制器43;分别能够控制视觉舵机42、升降电机221和驱动舵机321的关闭和启动,且用于处理采集信号。控制器43可选用现有的mcu。
40.通过视觉机构4中摄像头41、视觉舵机42和控制器43的设置,启动视觉舵机42,通过视觉舵机42对摄像头41的方向进行控制,进而使得地面上不同颜色的高尔夫球通过摄像
头41进行采集,形成采集信号,控制器43对采集信号进行处理,从而控制升降电机221和驱动舵机321的关闭和启动,从而能够自动捡起对地面上的高尔夫球。
41.实施例四在以上实施例的基础上,请一并参阅图3-图6,本发明还提供一种用于高尔夫球的收检机器人,包括以上的用于高尔夫球的捡球装置和移动机构5。
42.其中,移动机构5包括摆动电机51、驱动电机52和轮子53。摆动电机51和驱动电机52均安装于架体1的底端,摆动电机51的转轴与驱动电机52的安装端通过焊接的方式连接,驱动电机52的转轴与轮子53固定连接。本实施例中,移动机构5设有三组,三组移动移动分别安装于架体1的底端,且沿架体1的周向分布设置。本实施例中,摆动机构和驱动机构均可与控制器43电连接,以便于通过控制器43控制摆动机构和驱动机构的启动和关闭,通过控制器43能够实现轮子53更好地在地面上移动,使得用于高尔夫球的收检机器人能够更加的智能化。
43.启动摆动电机51和驱动电机52,驱动电机52驱动轮子53转动,通过轮子53在地面上移动,同时,通过摆动电机51实现轮子53角度的转动,从而通过移动机构5实现拾球装置在地面上移动,从而不仅实现对地面上散落的高尔夫球进行抓取,而且,通过视觉机构4的识别,能够识别不同颜色的高尔夫球,实现对不同颜色的高尔夫球进行分别抓取。
44.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1