一种具有防倒保护装置的智能机器人的制作方法
1.本实用新型涉及康复机器人技术领域,具体是一种具有防倒保护装置的智能机器人。
背景技术:
2.康复机器人作为医疗机器人的一个重要分支,它的研究贯穿了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机科学以及机器人学等诸多领域,已经成为了国际机器人领域的一个研究热点,目前,康复机器人已经广泛地应用到康复护理、假肢和康复治疗等方面,这不仅促进了康复医学的发展,也带动了相关领域的新技术和新理论的发展。
3.目前,市场上有一种具有防倒保护装置的康复机器人,专利号:cn210020195u,它利用围板对患者的臀部进行支撑,并利用伺服电机、绕线轮和拉绳的配合作用,可对围板的高度进行调整,进而可对不同身高的患者进行防倒保护。
4.但是,上述方案在对患者臀部进行支撑防倒后,对患者在康复平台上的移动区域造成了限位,使患者仅能在一定的区域内进行康复训练,使患者进行康复训练时的舒适性降低,并提升了患者康复训练的难度,降低了患者的训练效果;为此,我们提供了一种具有防倒保护装置的智能机器人解决以上问题。
技术实现要素:
5.本实用新型的目的就是为了弥补现有技术的不足,提供了具有防倒保护装置的智能机器人。
6.为实现上述目的,本实用新型提供如下技术方案:一种具有防倒保护装置的智能机器人,包括底板、康复平台和操控台,所述底板上表面的四个边角处均固定连接有立杆,所述操控台的上方设置有顶板,且顶板的底面与立杆的顶端固定连接,所述顶板的内部开设有滑槽,所述滑槽的内部滑动连接有滑块,所述滑块的内部开设有移动槽,所述移动槽的内部滑动连接有两个移动块,所述滑块上设置有驱动移动块移动的调节机构,两个所述移动块相互靠近的一侧面均设置有可移动的夹持块,两个所述移动块的内部均设置有驱动夹持块移动的升降机构。
7.进一步的,所述滑块的内部滑动连接有两个导向杆,两个所述导向杆的两端均与滑槽的内壁固定连接。
8.进一步的,所述调节机构包括驱动电机,所述驱动电机固定连接于滑块的上表面,所述驱动电机的输出转轴固定连接有双向螺杆,两个所述移动块的内部分别螺纹连接于双向螺杆的两端。
9.进一步的,所述双向螺杆的两端均转动连接有支撑块,两个所述支撑块的底面均固定连接于滑块的上表面。
10.进一步的,所述康复平台的底面固定连接于底板的上表面,所述操控台与康复平
台和驱动电机电连接。
11.进一步的,所述升降机构包括滑动槽,且滑动槽开设于移动块的内部,所述滑动槽的内部转动连接有调节螺栓,且调节螺栓的操控端位于移动块的外部。
12.进一步的,所述调节螺栓的外表面螺纹连接有联动块,且联动块滑动连接于滑动槽的内部,所述联动块远离调节螺栓的一侧面与夹持块的外表面固定连接。
13.进一步的,所述康复平台的上方设置有两个连接带,所述夹持块的两侧面均安装有卡扣,所述连接带的两端可拆卸安装于两个卡扣的内部。
14.与现有技术相比,该具有防倒保护装置的智能机器人具备如下有益效果:
15.一、本实用新型通过滑槽、滑块、调节机构、升降机构、移动槽、移动块和夹持块之间的配合设置,通过调节机构带动两个移动块在移动槽的内部进行相向运动,并利用升降机构对夹持块的高度调整,能够对不同身高患者的腰部进行固定,实现了对患者防倒保护的目的,并使移动块可带动滑块在滑槽的内部滑动,能够增加患者在康复平台上康复训练的范围,保证患者的训练效果。
16.二、本实用新型通过连接带和卡扣之间的配合设置,通过卡扣对连接带进行固定,进而可通过连接带对两个夹持块之间的缝隙处进行密封,可对患者的腰部进行全方位的防护,通过滑块在导向杆上滑动,能够提升滑块在滑槽内滑动的稳定性。
附图说明
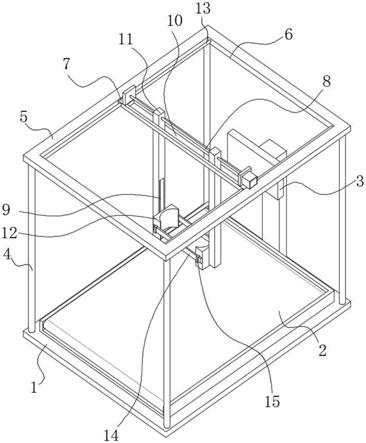
17.图1为本实用新型的立体图;
18.图2为本实用新型的俯视图;
19.图3为本实用新型图2中a-a的剖面图;
20.图4为本实用新型图3中b处结构的放大示意图。
21.图中:1、底板;2、康复平台;3、操控台;4、立杆;5、顶板;6、滑槽;7、滑块;8、调节机构;81、支撑块;82、驱动电机;83、双向螺杆;9、升降机构;91、滑动槽;92、调节螺栓;93、联动块;10、移动槽;11、移动块;12、夹持块;13、导向杆;14、连接带;15、卡扣。
具体实施方式
22.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
23.本实施例提供了一种具有防倒保护装置的智能机器人,该具有防倒保护装置的智能机器人用于在康复机器人中实现对患者的防倒保护,通过设计滑槽6、滑块7、调节机构8、升降机构9、移动槽10、移动块11和夹持块12,使得在对患者进行防倒保护时还保证了患者在康复平台2上的训练区域,达到提升患者康复训练效果的目的。
24.参见图1~图4,一种具有防倒保护装置的智能机器人,包括底板1、康复平台2和操控台3,底板1上表面的四个边角处均固定连接有立杆4,操控台3的上方设置有顶板5,且顶板5的底面与立杆4的顶端固定连接,顶板5的内部开设有滑槽6,滑槽6的内部滑动连接有滑块7。
25.滑块7的内部滑动连接有两个导向杆13,两个导向杆13的两端均与滑槽6的内壁固定连接,通过滑块7在导向杆13上滑动,能够提升滑块7移动过程中的稳定性。
26.滑块7的内部开设有移动槽10,移动槽10的内部滑动连接有两个移动块11,滑块7上设置有驱动移动块11移动的调节机构8,能够使移动块11在移动槽10的内部滑动,进而可对两个移动块11之间的间距进行调整。
27.调节机构8包括驱动电机82,驱动电机82固定连接于滑块7的上表面,驱动电机82的输出转轴固定连接有双向螺杆83,两个移动块11的内部分别螺纹连接于双向螺杆83的两端,通过驱动电机82的输出转轴驱动双向螺杆83旋转,并利用双向螺杆83带动移动块11在移动槽10的内部移动。
28.双向螺杆83的两端均转动连接有支撑块81,两个支撑块81的底面均固定连接于滑块7的上表面,通过支撑块81能够对双向螺杆83进行支撑,保证双向螺杆83旋转过程中的稳定性,并可利用支撑块81对移动块11进行限位。
29.康复平台2的底面固定连接于底板1的上表面,操控台3与康复平台2和驱动电机82电连接,康复平台2为现有结构,由电机、皮带、皮带轮组成,患者在往复移动的皮带轮上行走进行康复锻炼,操控台3能够对电机进行控制,控制电机的启闭和转速,导向杆13上还设置有限位感应器,当滑块7移动至限位感应器处可对电机进行停止供电。
30.两个移动块11相互靠近的一侧面均设置有可移动的夹持块12,两个移动块11的内部均设置有驱动夹持块12移动的升降机构9,两个夹持块12相互靠近的一侧面均安装有海绵,能够使夹持块12与患者腰部弹性接触,保证患者锻炼过程中的舒适性。
31.升降机构9包括滑动槽91,且滑动槽91开设于移动块11的内部,滑动槽91的内部转动连接有调节螺栓92,且调节螺栓92的操控端位于移动块11的外部,通过调节螺栓92的操控端能够控制调节螺栓92在滑动槽91的内部旋转。
32.调节螺栓92的外表面螺纹连接有联动块93,且联动块93滑动连接于滑动槽91的内部,联动块93远离调节螺栓92的一侧面与夹持块12的外表面固定连接,通过调节螺栓92在滑动槽91的内部旋转,能够使联动块93在滑动槽91内滑动,进而可对夹持块12的高度进行调整。
33.康复平台2的上方设置有两个连接带14,夹持块12的两侧面均安装有卡扣15,连接带14的两端可拆卸安装于两个卡扣15的内部,通过卡扣15能够对连接带14进行固定,进而利用连接带14对两个夹持块12之间的空隙处对患者的腰部进行阻拦。
34.工作原理:首先,患者先站在康复平台2上,然后,旋转调节螺栓92的操控端使调节螺栓92在滑动槽91的内部旋转,并使联动块93在滑动槽91的内部滑动,可对夹持块12的高度进行调整,并将夹持块12调整至患者腰部持平位置,然后,通过操控台3控制驱动电机82旋转,使驱动电机82的输出转轴驱动双向螺杆83旋转,并使两个移动块11在移动槽10内进行相向运动,并使夹持块12贴靠在患者的腰部上,并利用连接带14和卡扣15对患者的腰部进行再次固定,最后,通过操控台3控制康复平台2上皮带移动,能够使患者在康复平台2上进行走动,同时,还可使患者手持移动块11带动滑块7在滑槽6内滑动,使患者可在经受不住康复平台2上皮带转速时,在康复平台2上进行移动,进而避免患者在锻炼过程中产生安全隐患,能够增加患者在康复平台2上康复训练的范围,保证患者的训练效果。
35.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1