一种力量测评方法与流程
本发明涉及智能健身领域,具体涉及一种力量测评方法。
背景技术:
1、智能健身器械的工作原理为:智能健身器械中包括电机、差速器、支臂、拉绳以及相应的控制器、电路及配件,电机输出轴与差速器之间连接有皮带,拉绳一端与差速器连接,拉绳另一端沿着支臂行进后连接相应的拉环或其他健身配件,用户在健身时可以通过拉动拉绳进行锻炼,也可以利用支臂进行锻炼,拉绳通过差速器及皮带带动电机运动,电机通电时产生输出力矩即阻力,用户拉动拉绳需要克服电机的输出力矩,进而实现了用户进行力量训练的目的。
2、智能健身器械的锻炼方式是用户拉动拉绳需要克服电机的输出力矩进行力量训练,每个用户的力量水平不一样,因此采用统一的力量参数进行训练则不适用于所有用户,因此,有必要对用户的力量水平进行测量,然后根据用户的实际力量水平进行锻炼,进而实现安全及高效的锻炼。
3、申请号为2021111989597的专利公开了一种通过多次测量,且每次测量后根据前一次的力量测量结果对后一次的智能健身器械的测量参数进行更新,逐渐逼近用户的真实最大力量参数,最终能够准确的获得用户的最大力量信息。该申请具体通过用户在测试动作中的最大拉力和最大速度,获取测试动作的参数信息,并更新测量参数。本技术人在长期的使用过程中发现,申请号为2021111989597的专利的测量方法具有两个拟合过程,需要较多数据支撑,得到的结果的准确度较低,且通过在测评时,需要用户提供最大拉力,在测评时用户的使用舒适度较低,不便于长期使用。
技术实现思路
1、本发明的一个目的在于提供一种力量测评方法,提高力量测评的准确度,且增加用户的舒适度和体验感。
2、该目的采用以下技术方案实现:
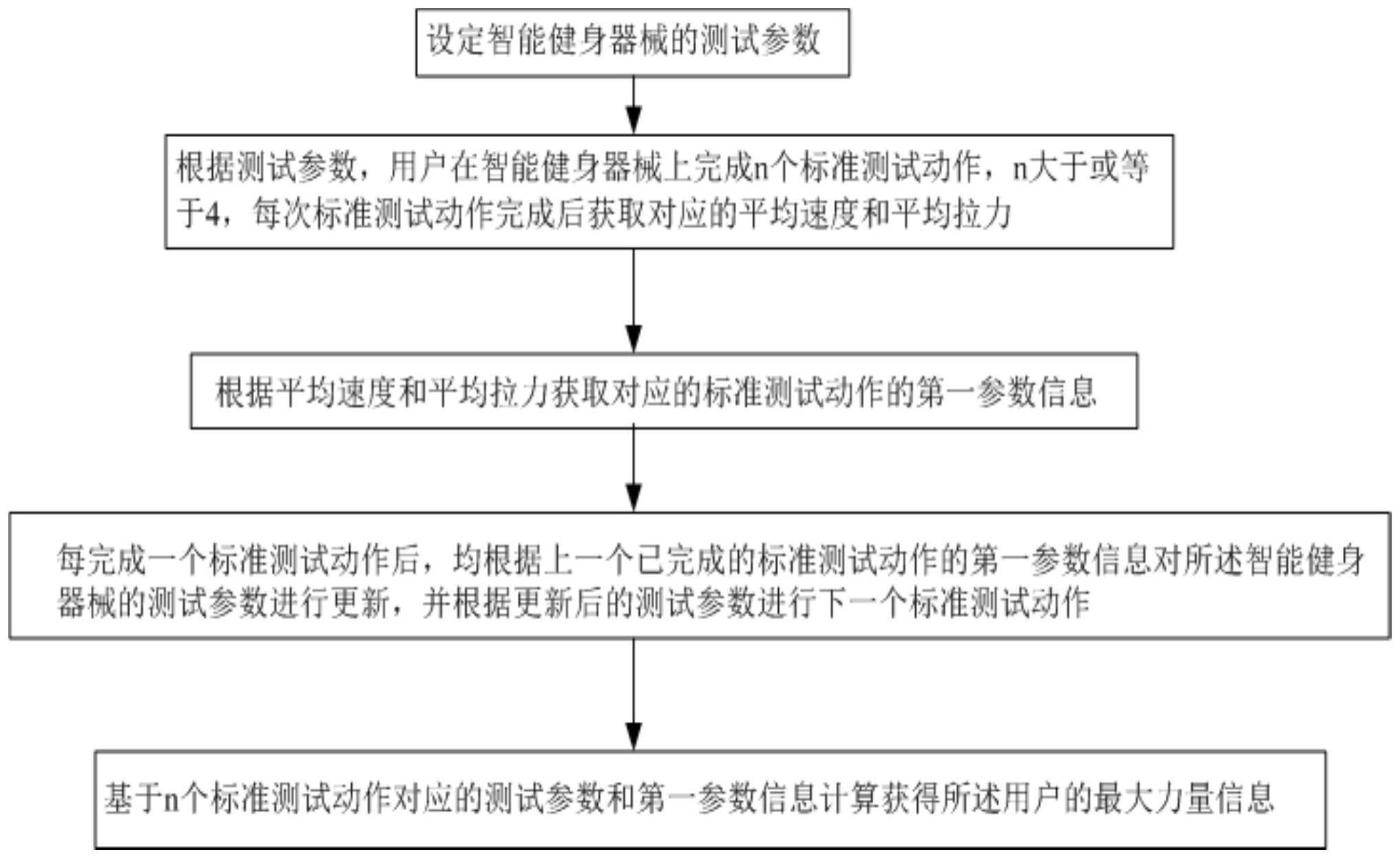
3、设定智能健身器械的测试参数;
4、根据测试参数,用户在智能健身器械上完成n个标准测试动作,n大于或等于4,每次标准测试动作完成后获取对应的平均速度和平均拉力;
5、根据平均速度和平均拉力获取对应的标准测试动作的第一参数信息;
6、每完成一个标准测试动作后,均根据上一个已完成的标准测试动作的第一参数信息对所述智能健身器械的测试参数进行更新,并根据更新后的测试参数进行下一个标准测试动作;
7、基于n个标准测试动作对应的测试参数和第一参数信息计算获得所述用户的最大力量信息。
8、由于测评前无法获取用户力量水平大小,因此需要一套适用不同力量水平的测评方法,
9、通过智能健身器械来测量用户的力量信息,通过多次测量,且每次测量后根据前一次的力量测量结果对后一次的智能健身器械的测量参数进行更新,逐渐逼近用户的真实最大力量参数,最终能够准确的获得用户的最大力量信息。与现有的力量测评方法相比,本发明在用户进行一种标准测试动作中,智能健身器械实时记录拉绳的拉出速度、拉绳的拉力大小,并通过实时记录拉绳的拉出速度、拉绳的拉力大小获取每次完成同一个标准测试动作的平均速度和平均拉力,通过上述数据对对所述智能健身器械的测试参数进行更新,使智能健身器调整控制力,使用户在拉动拉绳时拉动速度逐渐接近目标速度,进而在进行最后的标准测试动作时,获取准确的最大力量信息。与现有的测评方法相比,本发明不需要用户在不同动作下拉出最大拉力和最大速度,仅需要在拉动过程中速度逐渐接近预设的目标速度即可,因此本方法对于用户而言,在测评过程中舒适度更高,不存在吃力情况;同时,本发明通过平均速度和平均拉力逐渐调整智能健身器的控制力大小,使用户拉动过程中速度逐渐接近预设的目标速度,进而计算获取准确的最大力量信息,相比现有的测评方法,本发明获取的最大力量信息更为准确。
10、优选的,本方法中完成若干个标准测试动作具体包括:
11、测试参数包括m个目标速度,m大于或等于3;且m个目标速度的大小均不相同;
12、基于每个目标速度,用户在智能健身器械上分别完成第一个标准测试动作,并获取每个目标速度下第一个标准测试动作对应的平均速度和平均拉力;根据第一个标准测试动作下的m个平均速度和m个平均拉力得到第一参数信息;根据第一参数信息对所述智能健身器械的测试参数进行更新;
13、基于更新后的测试参数,在每个目标速度下,用户在智能健身器械上分别完成第二个标准测试动作,并获取每个目标速度下第二个标准测试动作对应的平均速度和平均拉力;根据第二个标准测试动作下的m个平均速度和m个平均拉力得到第二参数信息;根据第二参数信息对所述智能健身器械的测试参数进行更新;
14、……
15、基于更新后的测试参数,在每个目标速度下,用户在智能健身器械上分别完成第n个标准测试动作,并获取每个目标速度下第n个标准测试动作对应的平均速度和平均拉力;根据第n个标准测试动作下的m个平均速度和m个平均拉力得到第n参数信息;根据第n参数信息对所述智能健身器械的测试参数进行更新;
16、基于第一参数信息至第n参数信息计算获得所述用户的最大力量信息。
17、其中,每个目标速度为预设好的,每个标准测试动作分别在每个目标速度下完成,同一个标准测试动作在每个目标速度下进行测评,且目标速度不小于3个,若目标速度只有一个或两个,获取的参数信息准确度较低,因此将目标速度设置为不小于3个,这样能够确保不同的目标速度下获取的参数信息准确,通过参数信息更新下一个标准测试动作的测试参数,即智能健身器械的控制力,可使在进行下一个标准测试动作时,用户能够根据接近目标速度,最终在进行最后一个标准测试动作时,能够通过上述数据获取更为准确的大力量信息。
18、优选的,本方法中获取平均速度和平均拉力的方法具体包括:
19、用户在智能健身器械上完成一次标准测试动作,记录运动数据;
20、在运动数据中获取在预设速度范围内的速度和拉力;
21、根据获取的速度和拉力计算获得平均速度和平均拉力。
22、其中,在用户进行运动的同时,对运动进行计次,拉绳的一次拉出加一次回收,且拉出和回收应该满足预设的速度规则和距离规则,认为完成一次动作,在一次动作的拉出阶段,统计实时速度和实时拉力,在本发明中预设的速度规则和距离规则与进行的标准测试动作信息相关。在一次动作的拉出阶段获取拉动速度稳定的阶段,记录其平均速度和平均拉力。获取拉动速度稳定的阶段有多种方法,可以通过设置预设的速度范围获取,还可以通过速度变化值与阈值来确定,本发明并未对其具体的获取方法进行限定,只要能够获取拉动速度稳定的阶段的平均速度和平均拉力即可。
23、在获取平均速度和平均拉力后,本方法中获取第n参数信息具体包括:
24、根据第n个标准测试动作下的m个平均速度和m个平均拉力得到速度与拉力的线性函数;
25、根据预设的参考速度vref,在线性函数中获取参考速度vref对应的拉力fref;
26、第n参数信息包括最大力量fref和纵截距b,所述纵截距b为线性函数中与y轴交点的纵坐标,最大力量fref为线性函数中参考速度vref对应的拉力fref。
27、每个标准测试动作下,每个目标速度均对应有一个平均速度和平均拉力,在同一个标准测试动作下,根据m个平均速度和m个平均拉力得到一个速度与拉力的线性函数,其中,线性函数可以通过最小二乘方法拟合得到。也正因此,目标速度的数量不小于3,这样获取的速度与拉力的线性函数更为准确,在本发明中预设有参考速度vref,根据线性函数、参考速度vref得到拉力fref和纵截距b,并通过上述数据更新测试参数。在本发明中参考速度vref即接近绝对力量的速度附近,是根据vbt获取的,vbt即基于速度的训练,vbt一般指基于速度的力量训练通过采用线性位置传感器,或可穿戴设备,我们可以精确计算杠铃速度,从而产生运动员的力-速度分析,预估运动员1rm重量。
28、优选的,根据第n参数信息对测试参数进行更新具体包括:
29、根据第一参数信息、预设的参考速度vref和目标速度vd获取基础拉力f01;其中,rmref为根据用户信息预设的基础重量;根据基础拉力f01更新进行下一个标准测试动作的控制力f;
30、根据第二参数信息、预设的参考速度vref和目标速度vd获取基础拉力f02;其中,rmref为第一参数信息中的最大力量fref;根据基础拉力f02更新进行下一个标准测试动作的控制力f;
31、……
32、根据第n参数信息、预设的参考速度vref和目标速度vd获取基础拉力f0n;其中,rmref为第n-1参数信息中的最大力量fref;根据基础拉力f0n更新进行下一个标准测试动作的控制力f。
33、在第一次更新控制力f时,由于没有上一次参数信息中的最大力量fref,因此rmref为根据用户信息预设的基础重量,所述用户信息包括用户性别信息和用户体重信息。根据参数信息、预设的参考速度vref和目标速度vd获取基础拉力f0,最后通过基础拉力f0更新标准测试动作的控制力f,使得用户在拉动过程中速度更加接近预设的目标速度。
34、优选的,本发明在测评过程中,使用等速模式控制拉力,根据基础拉力f0n更新进行下一个标准测试动作的控制力f,其中:
35、
36、e(k)=v d-v(k+τ);
37、v(k+τ)=v(k)+a(k)*τ;
38、t为采样周期,v(k)为拉绳当前速度,τ电机输出拉力经过传动机构到实际用户拉绳拉力的延迟时间,v(k+τ)为未来的拉绳速度,e(k)为当前速度偏差,a(k)为当前拉绳加速度,k p为速度系数,kd为加速度系数。
39、其次,在本发明中用户在智能健身器械上完成4个标准测试动作。标准测试动作可以为多种,一般可从预设的标准测试动作库中选取,优选的,选取四个代表不同部位的动作,可增加数据的准确度。
40、本发明与现有技术相比,具有如下的优点和有益效果:
41、本发明一种力量测评方法,通过用户的平均速度和平均拉力逐渐调整智能健身器的控制力大小,使用户拉动过程中速度逐渐接近预设的目标速度,进而计算获取准确的最大力量信息,相比现有的测评方法,本发明获取的最大力量信息更为准确、高效,且对于用户而言,在测评过程中舒适度更高,不存在吃力情况,更便于长期使用。
- 还没有人留言评论。精彩留言会获得点赞!