警用抓捕技术训练人体模拟装置
1.本发明涉及警用训练辅助设备技术领域,尤其涉及一种警用抓捕技术训练人体模拟装置。
背景技术:
2.民警、武警人员为了保证在出现紧急事件时,能够具有灵活的反应能力、快速的反应速度和过硬的防卫与控制能力,需要每天按照训练计划进行训练并定期考核,以及时发现不足并调整训练计划,确保每位警员都能够具备过硬的实战技术来应对紧急事件。在实训计划中,一般会有长跑、短跑、引体向上、俯卧撑、仰卧起坐等常规训练项目,警员个人可独立完成,实现体能和耐力的训练;还会有擒拿、徒手攻防等专项训练,在专项训练中警员需要在配手的配合下完成相关的技术训练,实现警员实战能力的提高。
3.目前在警员与配手的控制抓捕技术的专项训练中,主要存在以下缺点:
4.1、在训练中,由于动作幅度过大,力度控制不好,很容易造成配手意外受伤。
5.2、与配手的传统训练中,由于配手的体力限制和关节被动控制次数限制等因素,导致警员不能通过大量的反复练习提高技术动作。
6.3、由于日常操练动作的不规范性,在执法实践中会导致制服动作力度过大,很容易造成被控人员的异常伤害;或制服动作力度不足,会造成控制失败,两方面都会影响执法机构的公众形象。
7.4、专项训练动作的幅度、力度等难以形成数据并实时监控和记录,在后期调整或改进过程中仅凭录制的影像材料和个人经验摸索,难以精准分析,因此调整速度慢,效果不显著。
8.5、考核及评分均靠个人凭经验判断完成,主观因素影响较大,难以准确反映警员的个人能力。
技术实现要素:
9.本发明所要解决的技术问题是提供一种无需配手,可以单独反复练习训练动作,有助于实现考核及评分量化的警用抓捕技术训练人体模拟装置。
10.为解决上述技术问题,本发明的技术方案是:警用抓捕技术训练人体模拟装置,包括训练模拟人体,所述训练模拟人体设有模拟人体头部、模拟人体颈部、模拟人体躯干、两个模拟人体上肢和两个模拟人体下肢,所述模拟人体上肢与所述模拟人体躯干的连接处设有上肢前后摆动装置和上肢侧向伸展装置,所述模拟人体上肢的中部设有肘部前后摆动装置,所述模拟人体上肢的端部通过模拟人体手腕连接有模拟人体手部;
11.所述模拟人体下肢上端与所述模拟人体躯干固定连接设置,所述模拟人体下肢的中部可弯曲转动设置,所述模拟人体下肢的下端铰接有模拟脚部,且所述模拟脚部固定安装于训练场地上,所述模拟人体下肢的转动处下方与所述模拟脚部之间连接有姿态自适应装置,所述模拟人体躯干内安装有与所述姿态自适应装置配合使用的姿态传感器;
12.所述模拟人体颈部、所述模拟人体躯干、所述模拟人体手部和所述模拟人体上肢内分别布置安装有信号检测装置,所述信号检测装置和所述姿态传感器连接有微处理器,所述微处理器封装于所述模拟人体头部或所述模拟人体躯干内,所述微处理器的控制端连接有声光提示器。
13.作为优选的技术方案,所述模拟人体躯干包括相对设置的两个躯干立架,两所述躯干立架上端固定连接有躯干上横架,两所述躯干立架的下端固定连接有躯干下横架,所述躯干立架、所述躯干上横架和所述躯干下横架的外侧包覆有躯干成型体;
14.所述模拟人体上肢包括与所述上肢侧向伸展装置连接的上臂架,所述上臂架通过所述肘部前后摆动装置活动连接有下臂架,所述上臂架与所述下臂架的外侧包覆有上肢成型体;
15.所述模拟人体手部包括与人体手部结构相应的手部支架,所述手部支架的外侧包覆有手部成型体;
16.所述模拟人体下肢包括两个相对套装于所述躯干下横架上的大腿架,两所述大腿架的下端转动安装有小腿架,所述大腿架与所述小腿架的外侧包覆有下肢成型体;
17.所述模拟脚部包括楔形的模拟脚板,且所述模拟脚板与所述小腿架铰接转动设置。
18.作为优选的技术方案,所述上肢前后摆动装置包括转动套装于所述躯干上横架上的前后摆动转轴,所述前后摆动转轴的外端延伸至所述上臂架内,所述前后摆动转轴与所述躯干上横架的套装连接处设有摆动复位扭簧和摆动限位器,且所述摆动复位扭簧套装于所述前后摆动转轴的外周,位于所述躯干上横架的端部还固定安装有套装于所述前后摆动转轴外周的阻力调节器,所述躯干上横架内位于所述前后摆动转轴的端部还设有位置编码器,与所述摆动限位器设有配合使用的极限位置传感器,且所述极限位置传感器相对设置为两个,所述极限位置传感器和所述位置编码器分别信号连接至所述微处理器。
19.作为优选的技术方案,所述摆动限位器包括在所述前后摆动转轴的外周围绕设置的环槽,所述环槽内位于最低点处设有转轴限位动块,所述转轴限位动块与所述前后摆动转轴固定连接,所述躯干上横架的内壁上相对于所述转轴限位动块固定安装有转轴上限位定块,所述躯干上横架的内壁上位于所述前后摆动转轴的后侧还固定安装有转轴后限位定块,所述转轴上限位定块和所述转轴后限位定块分别位于所述环槽内,所述极限位置传感器对应设于所述转轴上限位定块和所述转轴后限位定块上且位于与所述转轴限位动块相接触的一面。
20.作为优选的技术方案,所述上肢侧向伸展装置包括贯穿所述前后摆动转轴与所述上臂架设置的侧向伸展转轴,所述上臂架内位于所述侧向伸展转轴的外侧设有伸展复位弹簧,所述侧向伸展转轴与所述上臂架之间还设有伸展限位器,至少所述侧向伸展转轴的一端安装有阻力调节器。
21.作为优选的技术方案,所述姿态自适应装置包括缓冲液压缸,所述缓冲液压缸的上端转动安装于所述小腿架上,所述缓冲液压缸的下端转动安装于所述模拟脚板的顶端,所述缓冲液压缸上还限位安装有配合使用的回位弹簧。
22.作为优选的技术方案,所述信号检测装置为霍尔磁性传感器、压力传感器、近红外传感器、姿态传感器中的一种或两种组合。
23.作为优选的技术方案,所述模拟人体颈部上的所述信号检测装置设置为两个压力传感器和一个近红外传感器,且所述压力传感器在所述模拟人体颈部的两侧相对设置;
24.所述模拟人体躯干上的所述信号检测装置设置为压力传感器和近红外传感器,所述压力传感器在所述模拟人体躯干上位于所述模拟人体颈部的两侧设置、在所述模拟人体躯干的下部均布安装设置,所述近红外传感器在所述模拟人体躯干的下部设置;
25.所述模拟人体手部的所述信号检测装置设置为配合使用的霍尔磁性传感器、微型磁铁和压力传感器,所述霍尔磁性传感器安装在所述模拟人体手腕上,所述微型磁铁布置安装在所述模拟人体手部的手心与手背上,所述压力传感器分布于各手指的内外表面;
26.所述模拟人体上肢的所述信号检测装置设置为至少两个姿态传感器和压力传感器,所述姿态传感器和所述压力传感器分别固定于所述模拟人体上肢的上臂与前臂上。
27.作为优选的技术方案,所述模拟人体颈部上的所述信号检测装置设置为近红外传感器,所述近红外传感器安装于所述模拟人体颈部的后侧中部;
28.所述模拟人体躯干上的所述信号检测装置设置为若干近红外传感器,所述近红外传感器分别布置于所述模拟人体颈部两侧的所述模拟人体躯干上以及所述模拟人体躯干的下部;
29.所述模拟人体手部的所述信号检测装置设置为配合使用的霍尔磁性传感器和微型磁铁,所述霍尔磁性传感器安装在所述模拟人体手腕上,所述微型磁铁布置安装在所述模拟人体手部的手心与手背上;
30.所述模拟人体上肢的所述信号检测装置设置为姿态传感器,所述姿态传感器分别固定于所述模拟人体上肢的上臂与前臂上。
31.作为对上述技术方案的改进,还包括模拟训练手套,所述模拟训练手套的各手指及手掌处分别布置有压力传感器。
32.由于采用了上述技术方案,警用抓捕技术训练人体模拟装置,包括训练模拟人体,所述训练模拟人体设有模拟人体头部、模拟人体颈部、模拟人体躯干、两个模拟人体上肢和两个模拟人体下肢,所述模拟人体上肢与所述模拟人体躯干的连接处设有上肢前后摆动装置和上肢侧向伸展装置,所述模拟人体上肢的中部设有肘部前后摆动装置,所述模拟人体上肢的端部通过模拟人体手腕连接有模拟人体手部;所述模拟人体下肢上端与所述模拟人体躯干固定连接设置,所述模拟人体下肢的中部可弯曲转动设置,所述模拟人体下肢的下端铰接有模拟脚部,且所述模拟脚部固定安装于训练场地上,所述模拟人体下肢的转动处下方与所述模拟脚部之间连接有姿态自适应装置,所述模拟人体躯干内安装有与所述姿态自适应装置配合使用的姿态传感器;所述模拟人体颈部、所述模拟人体躯干、所述模拟人体手部和所述模拟人体上肢内分别布置安装有信号检测装置,所述信号检测装置和所述姿态传感器连接有微处理器,所述微处理器封装于所述模拟人体头部或所述模拟人体躯干内,所述微处理器的控制端连接有声光提示器;本发明具有以下有益效果:在上肢前后摆动装置、上肢侧向伸展装置、肘部前后摆动装置和模拟人体手腕的配合下,使模拟人体上肢能够在训练时配合警员完成抓捕术中与上肢相关的动作练习,模拟人体下肢和姿态自适应装置配合,能够完成腿部动作练习,且通过姿态自适应装置还能模拟制服过程中被控人员的立姿、卧姿、跪姿的调整,整个训练中的动作和力度均可在信号检测装置与微处理器的配合下,形成实施监控和历史训练数据,以供警员后期分析改进使用,以及实现考核和评分客观
化、数据化,有利于帮助警员对被控人员制服力度的有效控制,避免在实际应用过程中造成被控人员的意外伤害,且训练时无需配手,可独立完成。
附图说明
33.以下附图仅旨在于对本发明做示意性说明和解释,并不限定本发明的范围。其中:
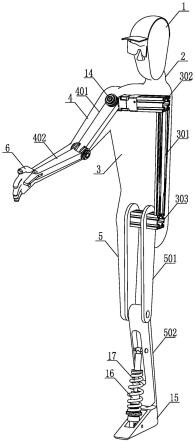
34.图1是本发明实施例的结构示意图;
35.图2是本发明实施例的部分内部架体结构示意图;
36.图3是本发明实施例模拟人体上肢的内部架体结构示意图;
37.图4是本发明实施例摆动限位器的结构示意图;
38.图5是本发明实施例微处理器的外部连接框图;
39.图6是本发明实施例模拟训练手套上压力传感器的布置图;
40.图中:1-模拟人体头部;2-模拟人体颈部;3-模拟人体躯干;301-躯干立架;302-躯干上横架;303-躯干下横架;4-模拟人体上肢;401-上臂架;402-下臂架;5-模拟人体下肢;501-大腿架;502-小腿架;6-模拟人体手部;7-前后摆动转轴;8-阻力调节器;9-极限位置传感器;10-环槽;11-转轴限位动块;12-转轴上限位定块;13-转轴后限位定块;14-侧向伸展转轴;15-模拟脚板;16-缓冲液压缸;17-回位弹簧;18-模拟训练手套。
具体实施方式
41.下面结合附图和实施例,进一步阐述本发明。在下面的详细描述中,只通过说明的方式描述了本发明的某些示范性实施例。毋庸置疑,本领域的普通技术人员可以认识到,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,附图和描述在本质上是说明性的,而不是用于限制权利要求的保护范围。
42.如图1和图2所示,警用抓捕技术训练人体模拟装置,包括训练模拟人体,所述训练模拟人体设有模拟人体头部1、模拟人体颈部2、模拟人体躯干3、两个模拟人体上肢4和两个模拟人体下肢5,上述各部分均对应设有相应的架体结构和包覆在架体结构外部的成型体,使仿真效果更好。
43.具体地,所述模拟人体躯干3包括相对设置的两个躯干立架301,两所述躯干立架301的上端固定连接有躯干上横架302,两所述躯干立架301的下端固定连接有躯干下横架303,所述躯干立架301、所述躯干上横架302和所述躯干下横架303的外侧包覆有躯干成型体。所述躯干立架301、所述躯干上横架302和所述躯干下横架303分别设置由高强度铝合金材料制成,强度大,抗击性能好。所述模拟人体上肢4包括上臂架401和下臂架402,所述上臂架401与所述下臂架402的外侧包覆有上肢成型体。所述上臂架401和所述下臂架402可设置为强度较大的板体结构或杆体结构。所述模拟人体下肢5包括两个相对套装于所述躯干下横架303上的大腿架501,两所述大腿架501的下端转动安装有小腿架502,所述大腿架501与所述小腿架502的外侧包覆有下肢成型体。所述大腿架501和所述小腿架502也可以设置为高强度的板体结构,且所述小腿架502的上端位于两所述大腿架501之间,两者转动安装使之能够模拟人体膝盖,达到改变所述训练模拟人体姿态的目的。
44.本实施例在所述模拟人体上肢4与所述模拟人体躯干3的连接处设有上肢前后摆动装置和上肢侧向伸展装置,所述模拟人体上肢4的中部设有肘部前后摆动装置,所述模拟
人体上肢4的端部通过模拟人体手腕连接有模拟人体手部6。所述肘部前后摆动装置连接于所述上臂架401与所述躯干上横架302之间,通过所述上肢前后摆动装置可以实现所述模拟人体上肢4的前后摆动;所述上肢侧向伸展装置连接于所述上肢前后摆动装置与所述上臂架401之间,通过所述上肢侧向伸展装置可以实现所述模拟人体上肢4的内外侧向伸展,通过所述肘部前后摆动装置可以实现所述上臂架401与所述下臂架402之间角度的改变。所述模拟人体手部6包括与人体手部结构相应的手部支架,所述手部支架的外侧包覆有手部成型体。所述手部支架设置为五指分开的架体,与人体手部结构相似,与人体手部各关节对应的部分可通过设置连接轴和扭簧实现,以便于在训练过程中手部的自动复位。所述模拟人体手腕可以调整所述模拟人体手部6内外侧向活动,使其最大程度地能够模拟或实现与人体各关节相应的功能。
45.如图2和图3所示,所述上肢前后摆动装置包括转动套装于所述躯干上横架302上的前后摆动转轴7,所述前后摆动转轴7的外端延伸至所述上臂架401内。通过所述前后摆动转轴7可以带动所述上臂架401前后转动,模拟人体手臂的向上举升、向下自然下放以及向后伸展。所述前后摆动转轴7与所述躯干上横架302的套装连接处设有摆动复位扭簧和摆动限位器,且所述摆动复位扭簧套装于所述前后摆动转轴7的外周。在训练过程中,所述模拟人体上肢4受力会前后转动,失力后在所述摆动复位扭簧的作用下,所述摆动复位扭簧可以带动所述模拟人体上肢4自动复位。由于人体的手臂前后伸展具有极限位置,因此设置了所述摆动限位器对所述模拟人体上肢4的转动进行限位,以模拟人体手臂。
46.在本实施例中,位于所述躯干上横架302的端部还固定安装有套装于所述前后摆动转轴7外周的阻力调节器8,所述躯干上横架302内位于所述前后摆动转轴7的端部还设有位置编码器,与所述摆动限位器设有配合使用的极限位置传感器9,且所述极限位置传感器9相对设置为两个。通过所述位置编码器可监控所述模拟人体上肢4的前后摆动位置,并在其到达极限位置时,由所述极限位置传感器9发出检测信号,以便于警员及时调整动作或力度。通过操作所述阻力调节器8可以调整所述前后摆动转轴7转动的阻力,到达模拟被制服人员抵抗力度的调整,以便于不同的训练强度使用。还可以设置卸力机构,当施加力量超过设定值后,形成自动卸力,以保护所述模拟人体上肢4防止受损。
47.如图4所示,所述摆动限位器包括在所述前后摆动转轴7的外周围绕设置的环槽10,所述环槽10内位于最低点处设有转轴限位动块11,所述转轴限位动块11与所述前后摆动转轴7固定连接,所述躯干上横架302的内壁上相对于所述转轴限位动块11固定安装有转轴上限位定块12,所述躯干上横架302的内壁上位于所述前后摆动转轴7的后侧还固定安装有转轴后限位定块13,所述转轴上限位定块12和所述转轴后限位定块13分别位于所述环槽10内,所述极限位置传感器9对应设于所述转轴上限位定块12和所述转轴后限位定块13上且位于与所述转轴限位动块11相接触的一面。所述前后摆动转轴7带动所述转轴限位动块11同步转动,当所述转轴限位动块11与所述转轴上限位定块12碰触时,其转动即停止,使所述模拟人体上肢4上举至最大位置,此时出发所述转轴上限位定块12上的所述极限位置传感器9产生信号;当所述转轴限位动块11与所述转轴后限位定块13碰触时,其转动即停止,使所述模拟人体上肢4后伸至最大位置,此时出发所述转轴上限位定块12上的所述极限位置传感器9产生信号。
48.所述上肢侧向伸展装置与所述上肢前后摆动装置的部分结构相似,包括贯穿所述
cortex-m系列微控制器,系统稳定可靠。本实施例的各传感器相互独立使能检测,且互不干扰,相互配合可精准检测动作完成度以及施力值。所述微处理器上的电源管理模块可以采用大容量锂电池,续航时间长,电池电量可实时监测,具有低压报警,提示及时充电的功能。
54.所述信号检测装置的一种设置方式为:
55.所述模拟人体颈部2上的所述信号检测装置设置为两个压力传感器和一个近红外传感器,且所述压力传感器在所述模拟人体颈部2的两侧相对设置。所述压力传感器用来检测训练时警员施加在所述训练模拟人体颈部2的压力,所述近红外传感器设于警员手部覆盖所述模拟人体颈部2区域的中心位置,用来检测动作是否到位。
56.所述模拟人体躯干3上的所述信号检测装置设置为压力传感器和近红外传感器,所述压力传感器在所述模拟人体躯干3上位于所述模拟人体颈部2的两侧设置(相当于设置在人体的双肩位置)、在所述模拟人体躯干3的下部均布安装设置(相当于设置在人体的腰部位置),实现锁抱力度的检测,所述近红外传感器在所述模拟人体躯干3的下部设置(相当于设置在人体的腰部位置),实现锁抱动作力的检测。所述压力传感器用于检测肩部及腰部的受压信号,所述近红外传感器用于检测动作信号,所述微处理器根据检测的数值来确定动作是否到位以及施加的力量大小等。
57.所述模拟人体手部6的所述信号检测装置设置为配合使用的霍尔磁性传感器、微型磁铁和压力传感器,所述霍尔磁性传感器安装在所述模拟人体手腕上,所述微型磁铁布置安装在所述模拟人体手部6的手心与手背上,所述压力传感器分布于各手指的内外表面。所述霍尔磁性传感器和所述微型磁铁在所述模拟人体手部6上安装位置对称设置,使模拟手腕的弯曲程度能够通过所述霍尔磁性传感器进行检测,具体检测需要与所述微型磁铁进行配合,即通过与所述微型磁铁的接近与远离来检测动作是否到位。通过所述压力传感器可以检测手掌施加力量的大小。
58.所述模拟人体上肢4的所述信号检测装置设置为至少两个姿态传感器和压力传感器,所述姿态传感器和所述压力传感器分别固定于所述模拟人体上肢4的上臂与前臂上,用于辅助检测动作的完整度。
59.所述信号检测装置的另一种设置方式为:
60.所述模拟人体颈部2上的所述信号检测装置设置为近红外传感器,所述近红外传感器安装于所述模拟人体颈部2的后侧中部。所述近红外传感器设于警员手部覆盖所述模拟人体颈部2区域的中心位置,用来检测动作是否到位。
61.所述模拟人体躯干3上的所述信号检测装置设置为若干近红外传感器,所述近红外传感器分别布置于所述模拟人体颈部2两侧的所述模拟人体躯干3上(相当于设置在人体的双肩位置)以及所述模拟人体躯干3的下部(相当于设置在人体的腰部位置);所述近红外传感器用于检测动作信号,所述微处理器根据检测的数值来确定动作是否到位。
62.所述模拟人体手部6的所述信号检测装置设置为配合使用的霍尔磁性传感器和微型磁铁,所述霍尔磁性传感器安装在所述模拟人体手腕上,所述微型磁铁布置安装在所述模拟人体手部6的手心与手背上。所述霍尔磁性传感器和所述微型磁铁在所述模拟人体手部6上安装位置对称设置,使模拟手腕的弯曲程度能够通过所述霍尔磁性传感器进行检测,具体检测需要与所述微型磁铁进行配合,即通过与所述微型磁铁的接近与远离来检测动作是否到位。
63.所述模拟人体上肢4的所述信号检测装置设置为姿态传感器,所述姿态传感器分别固定于所述模拟人体上肢4的上臂与前臂上,用于辅助检测动作的完整度。
64.如图6所示,本实施方式需要配套设置独立使用的柔性模拟训练手套,所述模拟训练手套的各手指及手掌处分别布置有压力传感器,用于检测施力的大小。
65.本发明在上肢前后摆动装置、上肢侧向伸展装置、肘部前后摆动装置和模拟人体手腕的配合下,使模拟人体上肢能够在训练时配合警员完成抓捕术中与上肢相关的动作练习,模拟人体下肢和姿态自适应装置配合,能够完成腿部动作练习,且通过姿态自适应装置还能模拟制服过程中被控人员的立姿、卧姿、跪姿的调整,各项训练动作可自由调整,避免了因动作固定成套,使训练乏味而影响训练效果。整个训练中的动作和力度均可在信号检测装置与微处理器的配合下,形成实施监控和历史训练数据,以供警员后期分析改进使用,避免在实操过程中因力度过大而造成被控人员的异常伤害,或力度过小而造成被控人员的控制失败,从而在任何情况下都能够防止执法机构的公众形象被损。以及实现考核和评分客观化、数据化,有利于帮助警员对被控人员制服力度的有效控制,避免在实际应用过程中造成被控人员的意外伤害,且训练时无需配手,可独立完成,从而避免了因动作幅度过大或力度控制不好而使配设造成以外受伤的现象。
66.本发明的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1