一种基于供棋装置的上棋方法以及卡棋检测处理方法与流程
1.本发明涉属于机器人技术领域,涉及一种上棋方法,特别涉及基于供棋装置的上棋方法以及卡棋检测处理方法。
背景技术:
2.随着人工智能技术的快速发展,应用而生多种仿生机器人,其能模仿生物、从事生物特点工作的机器人。目前在西方国家,机械宠物十分流行,另外,仿麻雀机器人可以担任环境监测的任务,具有广阔的开发前景。
3.在娱乐领域,包括有如下棋机器人,其可以实现人机下棋博弈,真正实现人机对弈。下棋机器人相似下棋过程中,需要通过机械手来抓取棋子并放入棋盘上相应位置,由于机械手的抓取动作固定,目前的供棋方式多为提前布置,在固定地点排列整齐,再通过机械手依次拾取使用,棋盒大量供棋的方式较少,机构上设计简单,稳定性和工作性能不好,供棋机构包含许多机械零件,由于机械结构与不规则棋子之间配合存在不确定性,棋篓棋子或者供给中的棋子姿态若是不标准,可能会出现卡棋现象,供棋不稳定这是所以供棋机构存在的问题,所以需要一个能够长期稳定工作的供棋方式来保证设备稳定运作。
技术实现要素:
4.针对现有的技术不足,本发明提供一种基于供棋装置的上棋方法以及卡棋检测处理方法。它所解决的是如何提高供棋装置的运作稳定性的技术问题。
5.为了实现上述目的,本发明所采取的技术方案是:
6.一种基于供棋装置的上棋方法,其特征在于,包括以下步骤:
7.步骤1:接受上棋命令;
8.步骤2:判断是否初始化,如果否,则停止执行,如果是,则进入下一步指令;
9.步骤3:判断是否处于上棋工作中,如果是,则停止执行,如果否,则进入下一步指令;
10.步骤4:检测棋仓落棋口是否有棋子,如果否,则棋仓开始正反转交替搅拌自动上棋,如果是,则棋仓停止搅拌并进入下一步指令;
11.步骤5:判断棋仓内的圆盘的转动次数,如果是奇数,则圆盘正转300毫秒再反转600毫秒再正转到限位,如果是偶数,则圆盘正转300毫秒再反转300毫秒再正转到限位;
12.步骤6:在五秒内判断圆盘是否到达限位,如果否,则判定卡棋进入卡棋处理步骤,如果是,则滑台推棋到上限位并灯带进入下一步指令;
13.步骤7:五秒内判断滑台是否到达限位,如果是,则上棋成功,如果否,则滑台卡住并报错。
14.在上述的一种基于供棋装置的上棋方法中,所述步骤6中的卡棋处理步骤包括圆盘正反循环转动五次,如果循环五次转动后无检测到限位,则进入报错程序,如果循环五次转动内检测到限位,则重新进入步骤5指令。
15.在上述的一种基于供棋装置的上棋方法中,所述步骤4中棋仓落棋口无棋子,所述棋仓开始正反转交替搅拌8秒内检测到棋子,则重新进入步骤4对有无棋子进行判断,如果棋仓正反交替搅拌超出8秒未检测到棋子则进入下一步指令。
16.在上述的一种基于供棋装置的上棋方法中,所述棋仓正反交替搅拌超出8秒未检测到棋子,则旋转圆盘电机,且正反各转动1秒,重复操作五次后再次判断棋仓落棋口有无棋子,如果无棋子,则进入人工操作指令。
17.一种基于供棋装置的卡棋检测处理方法,其特征在于,包括如下步骤:
18.步骤1.1:设备通电;
19.步骤2.1:通过霍尔传感器判断有无棋子,如果有,则进入下一步指令;
20.步骤3.1:棋仓的圆盘反转300毫秒,并判断300毫秒内是否触发限位,如果否,则圆盘正转到限位并等待下一步指令;
21.步骤4.1:判断圆盘正转2秒内是否达到限位,如果是,则滑台下降到最底部;
22.步骤5.1:判断五秒内是否到达限位,如果是,则初始化完成。
23.在上述的一种基于供棋装置的上棋方法中,所述步骤2.1中如果霍尔传感器判断无棋子,则圆盘反转到限位,并且直接进入步骤4.1。
24.在上述的一种基于供棋装置的上棋方法中,所述步骤3.1中判断300毫秒内是否触发限位,如果是,则滑台直接下降到最低部。
25.在上述的一种基于供棋装置的上棋方法中,所述步骤5.1中如果5秒内未到达限位,则进入人工介入指令。
26.在上述的一种基于供棋装置的上棋方法中,所述步骤4.1中两秒内没到达限位,则圆盘正转500毫秒再反转进入限位。
27.本发明的有益效果:该供棋模块装置能够有效的筛选棋子并且一颗一颗传送至顶板表面,不仅提高了筛棋上棋的稳定性,又能使棋盒供棋储存大量棋子,避免棋子的散落遗失,并且通过特定的工作方法和程序设定进行初始化和上棋检测当前上棋机构状态,排除简单的卡棋问题。
附图说明
28.图1为本发明供棋模块装置立体结构示意图。
29.图2为本发明供棋模块装置俯视结构图。
30.图3为本发明供棋模块装置正视结构图。
31.图4为本发明图3中a向剖视图。
32.图5为本发明图3中b向剖视图。
33.图6为本发明图3中c向剖视图。
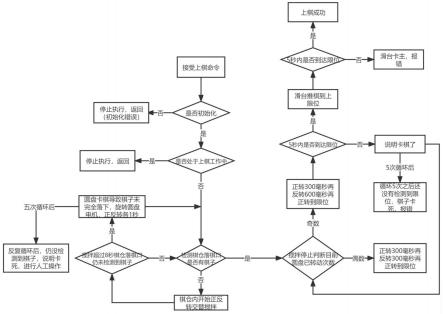
34.图7为本发明的上棋方法的流程图。
35.图8为本发明图的检测方法的流程图。
具体实施方式
36.参照附图1~6所示的一种下棋机器人的供棋模块装置,供棋模块装置包括底座1,在其顶部悬置有汇聚棋子的顶板2,在顶板2底部左右对称设置有与其表面贯通且盛装棋子
的棋盒3,散落放置在顶板2上的若干个棋子可汇聚落入至棋盒3内收集。在底座1上设置有与每个棋盒3底部贯通对应的棋子筛选机构,通过该棋子筛选机构可将棋盒3中落入的多枚棋子单个并依次筛选出。而在对称的棋子筛选机构之间设置有将其与顶板2表面贯通连接的棋子输送机构,其将单个筛选出的棋子再次逐个输送至顶板2表面,供下棋人员拿取,其整体上实现将若干棋子逐个筛选并再次单个输送的操作,解决多个棋子混乱,不便于下棋者逐个拿取的操作,并且采用的棋盒3对多个棋子进行收集,避免棋子的散落丢失。所有机构均设置在底座1和顶板2之间的空腔内,既方便统一固定安装,又起到对机构的保护作用。
37.具体的,如图1-3所示,棋盒3为漏斗结构,包括顶部开口301和底部出棋口302,顶部开口301与顶板2表面贯通,顶板2上散落的多枚棋子可一起通过顶部开口301汇聚至棋盒3内,方便棋子回收。在棋盒3侧壁底部设置有贯穿其内部的搅拌电机4,搅拌电机4上连接有与出棋口302相近的搅拌杆41。搅拌杆41对出棋口302内聚集的棋子进行搅拌,避免多枚棋子在出棋口302处的聚集及卡滞,使得单枚棋子可依次从出棋口302落出。
38.具体的,如图3所示,棋子筛选机构包括在底座1上设置的u型结构的筛选支架11,在其上水平设置有底盘5,底盘5远离出棋口302一侧开设有与其侧壁贯通的第一通槽501,底盘5上旋转设置有圆盘6(优选的,在圆盘6底部设置有驱动底盘5旋转的传送电机15),并在圆盘6上过其圆心左右对称开设有与第一通槽501结构相同的第二通槽601,并且一侧第二通槽601与出棋口302大小相同且竖向对应,在圆盘6底部还设置有旋转限位机构。该棋子筛选机构的筛选操作为:首先,通过传送电机15驱动圆盘6旋转,在旋转限位机构的限位作用下,使得其一侧的第二通槽601与出棋口302竖向对应,从出棋口302落出的棋子落入至该第二通槽601中(优选的圆盘6略大于棋子厚度),接着通过传送电机15再次旋转,圆盘6通过第二通槽601带动棋子在底盘5表面沿圆周移动至与第一通槽501相对的位置处,并通过棋子输送机构将该枚棋子输送至顶板2的表面,此时圆盘6另一侧的第二通槽601则再次旋转至出棋口302底部,可再次落入单枚棋子,重复上述动作,可间歇性的实现棋子的连续筛选传送及输送。在第二通槽601并未与出棋口302对应的状态下,圆盘6表面可限制出棋口302内棋子的掉落,底盘5也可限制第二通槽601内的棋子在周向移动过程中的掉落。
39.具体的,如图3所示,旋转限位机构包括设置在圆盘6底部且贯穿至底盘5内底部的限位杆7,底盘5上开设有将限位杆7沿圆周旋转的弧形通槽502,并在筛选支架11内部两侧设置有与限位杆7接触且控制第二通槽601与出棋口302及第一通槽501交替对应的水平限位开关8,在底盘5上还设置有与出棋口302对应的棋子检测传感器9(优选为霍尔传感器或光电传感器,其同时与外侧的第二通槽601对应,检测其内棋子)。旋转限位作用为:首先通过棋子检测传感器9检测与出棋口302内相对的第二通槽601内是否有棋子落入,若无落入,则等待通过搅拌杆41持续的搅拌作用而使得棋子最终通过出棋口302落入至第二通槽601内,当棋子检测传感器9检测到棋子后,传送电机15旋转,圆盘6通过第二通槽601带动棋子在底盘5表面沿圆周移动至与第一通槽501相对的位置处,此时限位杆7在弧形通槽502中同步旋转并接触到水平限位开关8而停止传送电机15动作,限制圆盘6只能旋转180
°
。通过棋子输送机构将该枚棋子输送至顶板2的表面,此时圆盘6另一侧的第二通槽601则再次旋转至出棋口302底部,可再次落入单枚棋子,当棋子检测传感器9检测到棋子后,传送电机15反向旋转进行棋子的输送,并通过另一侧的水平限位开关8停止传送电机15动作,如此往复动作,实现棋盒3内棋子的单枚转移操作。
40.具体的,如图3所示,棋子输送机构包括与第一通槽501、第二通槽601及顶板2表面贯通的棋子输送筒10,在左右对称的棋子输送筒10内均竖向滑动设置有水平连接的棋子输送台12(棋子输送筒侧壁具有贯通开口,图中未示出,用以将两侧的棋子输送台12连接,并同时实现在棋子输送筒10中升降),底座1上竖向设置有支撑板13,其上设置有与棋子输送台12连接的竖向传动机构和垂直限位开关14。
41.其中,如图3所示,竖向传动机构包括有设置在支撑板13上下侧壁的皮带轮16、皮带17,以及与一个皮带轮16连接的提升电机18,皮带17侧壁设置有提升臂19,提升臂19与两侧的棋子输送台12连接,垂直限位开关14设置在支撑板13底部,可与提升臂19底部接触。输送操作为:通过提升电机18驱动皮带17移动,驱使提升臂19带动两侧的棋子输送台12在棋子输送筒10下移至第一通槽501内,与底盘5上表面齐平,通过提升臂19与垂直限位开关14接触后停止,接着传送电机15旋转,圆盘6通过第二通槽601带动棋子在底盘5表面沿圆周移动至与第一通槽501相对的位置处,并转移至棋子输送台12表面(其表面可设置棋子检测传感器9,检测棋子的落入),接着提升电机18驱动皮带17反向移动,驱使提升臂19带动两侧的棋子输送台12在棋子输送筒10上移至顶板2表面(顶板2底部设置有上侧的垂直限位开关14,图中未示出),完成棋子的输送。当棋子输送台12再次下落至第一通槽501内后,传送电机15反向旋转,将另一第二通槽601内落入的棋子传送至棋子输送台12表面,如此往复动作,实现棋子的单枚下落、传送及输送操作。
42.优选的,在支撑板13侧壁还设置与导轨20,提升臂19侧壁还设置有与导轨20滑动嵌入的滑块21,在滑块21和导轨20的作用下,提升臂19能够保持稳定的上下移动。
43.本发明的原理是:
44.第1步供给机位:提升电机18启动,将棋子输送台12转动至下限位,触发垂直限位开关14后停止,此时棋子输送台12在第一通槽501内,棋子输送台12的上端面与底盘5的上端面保持水平一致。
45.第2步搅拌筛棋:棋子储存在棋盒3内,并顺着漏斗棋盒下端的出棋口302落入圆盘6外侧的第二通槽601内的底盘5上,此时若是带磁棋子可以使用霍尔传感器,若是普通棋子可以使用光电传感器,此时棋子检测传感器9能够检测底盘5上是否存在棋子,若是存在棋子就进行第3步操作,若是没有棋子,就说明棋子没有从棋盒3中落下,此时搅拌电机4启动,带动搅拌杆41正反转往复转动,搅拌棋盒3下端出棋口302正上方的棋子,直至棋子能够顺利落下,待棋子检测传感器9检测到棋子后,电机才可选择停止转动,然后进入正常第3步操作。
46.第3步水平传送:传送电机15启动,带动圆盘6转动,圆盘6带动限位杆7移动(若限位杆7触发的是近端的水平限位开关8,则圆盘6的转动时间会偏短,此时传送电机15会反转),当限位杆7触发了远端水平限位开关8后,传送电机15停止,此时,圆盘6的第二通槽601内的棋子已经被运送至棋子输送台12上方。
47.第4步抬升供给:提升电机18启动,将棋子输送台12转动至上限位,触发上侧的垂直限位开关14限位后停止,此时棋子输送台12在最顶部,棋子输送台12的上端面与顶板2的上端面保持水平一致,此时棋子被棋子输送台12送至顶板2之上的棋子拾取位置,从而可给外部的机械手提供棋子。
48.棋子拾取完毕后,回到第一步,重新开始工作。
49.如图7所示的一种基于供棋装置的上棋方法,包括以下步骤:步骤1:接受上棋命令;步骤2:判断是否初始化,如果否,则停止执行,如果是,则进入下一步指令;步骤3:判断是否处于上棋工作中,如果是,则停止执行,如果否,则进入下一步指令;步骤4:检测棋仓落棋口是否有棋子,如果否,则棋仓开始正反转交替搅拌自动上棋,如果是,则棋仓停止搅拌并进入下一步指令;步骤5:判断棋仓内的圆盘的转动次数,如果是奇数,则圆盘正转300毫秒再反转600毫秒再正转到限位,如果是偶数,则圆盘正转300毫秒再反转300毫秒再正转到限位;步骤6:在五秒内判断圆盘是否到达限位,如果否,则判定卡棋进入卡棋处理步骤,如果是,则滑台推棋到上限位并灯带进入下一步指令;步骤7:五秒内判断滑台是否到达限位,如果是,则上棋成功,如果否,则滑台卡住并报错。
50.步骤6中的卡棋处理步骤包括圆盘正反循环转动五次,如果循环五次转动后无检测到限位,则进入报错程序,如果循环五次转动内检测到限位,则重新进入步骤5指令。步骤4中棋仓落棋口无棋子,棋仓开始正反转交替搅拌8秒内检测到棋子,则重新进入步骤4对有无棋子进行判断,如果棋仓正反交替搅拌超出8秒未检测到棋子则进入下一步指令。棋仓正反交替搅拌超出8秒未检测到棋子,则旋转圆盘电机,且正反各转动1秒,重复操作五次后再次判断棋仓落棋口有无棋子,如果无棋子,则进入人工操作指令。
51.如图8所示的卡棋检测处理方法,包括如下步骤:步骤1.1:设备通电;步骤2.1:通过霍尔传感器判断有无棋子,如果有,则进入下一步指令;步骤3.1:棋仓的圆盘反转300毫秒,并判断300毫秒内是否触发限位,如果否,则圆盘正转到限位并等待下一步指令;步骤4.1:判断圆盘正转2秒内是否达到限位,如果是,则滑台下降到最底部;步骤5.1:判断五秒内是否到达限位,如果是,则初始化完成。
52.步骤2.1中如果霍尔传感器判断无棋子,则圆盘反转到限位,并且直接进入步骤4.1。步骤3.1中判断300毫秒内是否触发限位,如果是,则滑台直接下降到最低部。步骤5.1中如果5秒内未到达限位,则进入人工介入指令。步骤4.1中两秒内没到达限位,则圆盘正转500毫秒再反转进入限位。该供棋模块装置能够有效的筛选棋子并且一颗一颗传送至顶板表面,不仅提高了筛棋上棋的稳定性,又能使棋盒供棋储存大量棋子,避免棋子的散落遗失,并且通过特定的工作方法和程序设定进行初始化和上棋检测当前上棋机构状态,排除简单的卡棋问题。
53.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制,同时以上显示和描述了本发明的基本原理、主要特征和本发明的优点,本行业的技术人员应该了解。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1