一种武术擂台小车及其控制方法
本发明涉及智能机器人,更具体地说,是涉及一种武术擂台小车及其控制方法。
背景技术:
1、机器人武术擂台赛是中国机器人大赛中一项新的赛事。它的主要内容是:两个完全自主的机器人在一个2.4*2.4米的擂台上,使用各种传感器来感知自身的位置、姿态,并感知对手的位置、方向,并利用各种执行器来互相攻击的对抗性机器人竞赛。
2、目前,公开日为2018年2月9日,公开号为cn107678423a的中国发明申请提出了一种武术擂台小车及其控制方法,其中包括:小车主体、控制系统、执行系统以及感知系统;所述控制系统、所述执行系统以及所述感知系统均安装在所述小车主体上,其中所述感知系统包括:多个边缘检测传感器、多个擂台检测传感器以及多个敌对小车检测传感器;多个所述边缘检测传感器、多个所述擂台检测传感器以及多个所述敌对小车检测传感器均围绕所述底盘的中心垂线均匀设置。
3、针对上述文件中的相关技术,发明人认为,此设计中使用了多达20个传感器对小车的各种情况进行监测,结合传感器的安装结构,在无形中增加了小车的自重,导致小车的灵活性受到极大影响,很容易因灵活性不足而导致比赛失败,同时灵活性的不足也会影响小车在躲避时的动作,无法做到对敌对小车攻击的有效躲避,从而影响对抗结果。
技术实现思路
1、本发明的目的在于提供一种武术擂台小车及其控制方法,以克服上述现有技术存在的缺点,本发明采用前摄像头机构和后摄像头机构取代传统的传感器结构,减少了结构件的数量,因为传感器数量的减少,减少了控制步骤,使控制程序更简单,执行程序更顺畅,同时结构件及传感器的减少降低了小车的整体重量,提高了小车的灵活性,使小车在对抗过程中更容易进行躲避和移动。
2、为实现上述目的,第一方面,本发明提供一种武术擂台小车,采用如下的技术方案是:
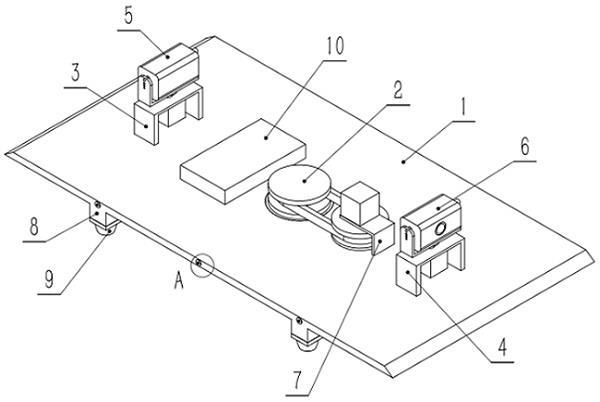
3、一种武术擂台小车,包括底盘,所述底盘中间连接旋转机构,所述旋转机构下方连接移动机构,所述底盘上面一侧连接前摄像头机构,所述底盘上面远离前摄像头机构一侧连接后摄像头机构,所述底盘上面靠近后摄像头机构内侧安装旋转电机架,所述底盘下方四角连接地脚立柱,所述地脚立柱下面安装万向球,所述底盘上面靠近前摄像头机构一侧安装控制器,所述底盘两侧安装压力传感器,所述底盘上面旋转机构两侧安装蓄电池,所述底盘外侧连接外壳体,所述外壳体安装导轮机构。
4、通过采用上述方案,前摄像头机构和后摄像头机构取代了原有的各部位传感器,使小车的运行观察过程更细致,同时小车底部采用万向球作为支撑,使小车稳固的同时可以所以变换方向,设置在底盘上的控制器对小车的所有动作进行自动控制,而蓄电池可以为小车提供良好的电力输出。
5、如上所述的一种武术擂台小车,所述旋转机构包括旋转电机,所述旋转电机前端连接主动轮,所述旋转电机安装在旋转电机架上,所述主动轮连接同步带,所述同步带另一侧连接从动轮,所述从动轮下方连接移动机构。
6、通过采用上述方案,旋转电机带动主动轮进行正反向旋转,再由主动轮通过同步带带动从动轮做同向转动,最后由从动轮带动下方的移动机构进行不同方向的移动。
7、如上所述的一种武术擂台小车,所述移动机构包括移动盘,所述移动盘中间安装移动电机板,所述移动电机板上安装双出轴电机,所述双出轴电机两端连接主轮连接轴,所述主轮连接轴上穿有主轮,所述主轮连接轴另一端连接减震弹簧,所述移动盘与主轮垂直位置安装辅助轮,所述移动盘上面连接从动轮,所述移动盘上端连接轴承,所述轴承安装在底盘上。
8、通过采用上述方案,双出轴电机带动主轮连接轴转动,再由主轮连接轴带动主轮进行旋转,减震弹簧有效的帮助主轮进行减震,防止受到冲击时导致主轮连接轴脱落,辅助轮可以为移动机构提供辅助支撑,同时也可以使移动更稳定。
9、如上所述的一种武术擂台小车,所述底盘一侧安装前摄像头安装架,所述底盘远离前摄像安装架一侧安装后摄像头安装架。
10、如上所述的一种武术擂台小车,所述前摄像头机构包括第一摄像头旋转电机,所述第一摄像头旋转电机安装在前摄像头安装架上,所述第一摄像头旋转电机前端连接第一法兰,所述第一法兰上面连接前摄像头架,所述前摄像头架一侧通过第一螺栓连接前摄像头壳体,所述前摄像头壳体内侧远离第一螺栓一侧安装第一数字舵机,所述第一数字舵机前端穿过前摄像头壳体连接第一舵盘,所述第一舵盘连接前摄像头架,所述前摄像头壳体中间安装前摄像头。
11、通过采用上述方案,第一摄像头旋转电机为前摄像头架进行水平转动的动力,从而使前摄像头可以完成360°旋转,再通过第一数字舵机对前摄像头进行角度调节,使前摄像头可以对上下进行观察。
12、如上所述的一种武术擂台小车,所述后摄像头机构包括第二摄像头旋转电机,所述第二摄像头旋转电机安装在后摄像头安装架上,所述第二摄像头旋转电机前端连接第二法兰,所述第二法兰上面连接后摄像头架,所述后摄像头架一侧通过第二螺栓连接后摄像头壳体,所述后摄像头壳体内远离第二螺栓一侧安装第二数字舵机,所述第二数字舵机前端穿过后摄像头壳体连接第二舵盘,所述第二舵盘连接后摄像头架,所述后摄像头壳体中间安装后摄像头。
13、通过采用上述方案,第二摄像头旋转电机为后摄像头架进行水平转动的动力,从而使后摄像头可以完成360°旋转,再通过第二数字舵机对后摄像头进行角度调节,使后摄像头可以对上下进行观察。
14、如上所述的一种武术擂台小车,所述外壳体一侧设置前陡坡,所述外壳体远离前陡坡一侧设置后陡坡,所述前陡坡和所述后陡坡下端设置导轮机构。
15、如上所述的一种武术擂台小车,所述导轮机构包括导轮支撑块,所述导轮支撑块安装在外壳体上,一侧的所述导轮支撑块安装导轮电机,所述导轮电机前端连接导轮主轴,所述导轮主轴上穿有导轮连接块,所述导轮连接块前端连接导轮支架,所述导轮支架前端连接导轮轴,所述导轮轴中间连接导轮,所述导轮支撑块上方安装导轮限位块,所述导轮限位块中间连接导轮限位轴,所述导轮限位块安装在外壳体上。
16、通过采用上述方案,导轮电机带动导轮主轴转动,再通过导轮主轴带动导轮连接块、导轮支架与导轮完成角度调节,再通过移动机构提供的前驱动力完成小车上台的动作,当小车完成上台程序后,导轮电机带动导轮收回到导轮限位轴处停止。
17、第二方面,本发明提供的一种武术擂台小车控制方法,采用如下的技术方案:
18、一种武术擂台小车控制方法,包括:获取前摄像头的第一视觉信号,后摄像头的第二视觉信号,压力传感器的第三感应信号;
19、根据所述的第一视觉信号判断武术擂台小车是否在擂台上;当武术擂台小车不在擂台上,反馈控制器执行上台程序;
20、当武术擂台小车在擂台上,根据所述第一视觉信号、第二视觉信号判断武术擂台小车是否到达擂台边缘,并根据第一视觉信号和第二视觉信号查找敌对武术擂台小车;
21、当武术擂台小车处于擂台边缘,但周围无敌对武术擂台小车时,反馈控制器执行查找程序;
22、当武术擂台小车不在擂台边缘,但周围有敌对武术擂台小车时,反馈控制器执行攻击程序;
23、当武术擂台小车处于擂台边缘,并且周围有敌对武术擂台小车时,执行旋转躲避程序。
24、如上所述的一种武术擂台小车控制方法,所述查找程序包括根据所述前摄像头传输的第一视觉信号与所述后摄像头传输的第二视觉信号判断武术擂台小车所在位置;
25、如果前后近距离有遮挡物,则武术擂台小车在擂台下;
26、如果前后近距离无遮挡物或仅一侧有遮挡物,则武术擂台小车在擂台上;
27、若武术擂台小车在擂台上,则启动查找程序对敌对武术擂台小车进行搜索;
28、当查找程序查找到敌对武术擂台小车开始执行攻击程序;
29、所述攻击程序包括根据前摄像头传输的第一视觉信号与所述后摄像头传输的第二视觉信号锁定敌对武术擂台小车位置;
30、如果敌对武术擂台小车在擂台下,则移动到敌对武术擂台小车就近位置,防止敌对武术擂台小车上台;
31、如果敌对武术擂台小车在擂台上,则对敌对武术擂台小车进行推行,将敌对武术擂台小车推到擂台下,然后重复上一动作;
32、如果敌对武术擂台小车在擂台上,且正在对我方武术擂台小车进行攻击,则执行旋转躲避程序;
33、所述躲避程序包括根据前摄像头传输的第一视觉信号、所述后摄像头传输的第二视觉信号及所述压力传感器的第三感应信号判断我方武术擂台小车是否受到攻击;
34、如果是,则执行旋转程序将敌对的武术擂台小车挤开,并同时执行躲避程序,将我方武术擂台小车移动出敌对武术擂台小车的攻击范围,然后执行攻击程序对敌对武术擂台小车进行攻击;
35、如果被敌对武术擂台小车攻击导致落下擂台,则执行上台程序,并重复执行上述程序。
36、与现有技术相比,本发明的有益效果是:
37、1、本小车采用前摄像头机构、后摄像头机构与压力传感器代替现有技术的红外或激光传感器结构,减少了安装传感器所需的结构件,降低了小车的整体重量,提高了小车的灵活性,同时增加了小车被攻击时的躲避能力;
38、2、本小车由于减少了传感器的数量,从而减少了控制程序的步骤,使控制程序更精炼,从而降低了控制程序在运行时出现bug的几率,加强了小车的控制力。
- 还没有人留言评论。精彩留言会获得点赞!