多功能机器人
1.本实用新型属于婴幼儿早教工具、玩具等技术领域,特别涉及一种多功能机器人。
背景技术:
2.随着数字化技术的发展,智能化成为婴幼儿早教工具或玩具的一大方向,这一类工具或者玩具可概称为机器人或者早教机器人。在当前技术中,其互动性尚待进一步研究。尤其是在使用者介入工具编程时,现有技术一般均是由技术人员提前将机器人所走路径全部设定好,通过控制塔安装的摄像头识别下方自由排序的模块驱动机器人做出相应的动作。
3.这种方法有一定的局限性,一是必须按照控制塔下方自由排序的模块驱动,使用的自由度受限,形式过于单一,灵活性、互动性和趣味性较少,二是这些模块长期暴露在外界加上长时间使用容易损坏。
技术实现要素:
4.为了克服上述现有技术的缺点,本实用新型的目的在于提供一种多功能机器人,以期提高婴幼儿早教工具或玩具的趣味性、互动性和灵活性,不再局限于单一路径规划。
5.为了实现上述目的,本实用新型采用的技术方案是:
6.多功能机器人,其特征在于,包括行进体、行进路网和若干可移动射频卡;
7.所述行进体底部设置有射频卡识别器;所述行进路网由若干x向路径和若干y向路径交错组成,所述可移动射频卡用于设置在两个交点之间的路径上;
8.所述可移动射频卡的标签包括启动、前进、左转、右转、后退和停止;其中,在相邻交点之间最多设置一个可移动射频卡。
9.在一个实施例中,所述行进体为的行进机构为带有转向功能的驱动轮。
10.在一个实施例中,所述行进体内置控制器,所述控制器的输入端与所述射频卡识别器连接获取其读取的可移动射频卡的标签,所述控制器的控制端与所述驱动轮的转向驱动电机连接。
11.在一个实施例中,所述行进体上设置有语音识别模块。
12.在一个实施例中,所述行进体上设置有红外循迹传感器,所述红外循迹传感器设置于行进体的正面下方。
13.在一个实施例中,所述行进体上设置有雷达传感器和蜂鸣器,所述雷达传感器设置于行进体的正面。
14.在一个实施例中,所述可移动射频卡设置于相邻两个交点之间路径的中点位置。
15.在一个实施例中,所述路径上在设置可移动射频卡的位置有凹槽,所述可移动射频卡设置于凹槽中。
16.在一个实施例中,所述可移动射频卡设置于粘贴布的夹层中,通过粘贴布粘贴在路径上。
17.在一个实施例中,所述路径上在设置可移动射频卡的位置有磁块,所述可移动射频卡设置于无盖的铁盒中,通过所述铁盒与磁块实现安装。
18.与现有技术相比,本实用新型的有益效果是:
19.1、通过在行进路网的路径设置代表不同动作的标签的可移动射频卡,可实现行进体的相应动作控制,原理清晰,便于操作。
20.2、可移动射频卡是可移动的,因此可以人为操作使其设置位置变化,由此实现对行进体的相应动作控制,具有趣味性、互动性和灵活性,尤其是对于口齿尚不清楚的少儿,也能完成操作。
21.3、增设了语音识别模块,可通过语音指令使行进体做出相应动作,不仅避免了模块的损坏和形式的单一,且灵活度很高,并可有效提高少儿的语言表达能力。
附图说明
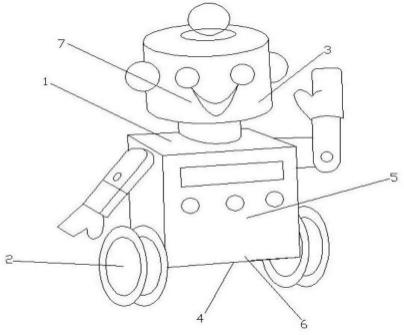
22.图1是本实用新型行进体的一种结构示意图。
23.图2是本实用新型行进路网的一种结构示意图,图中a~q表示可移动射频卡。
具体实施方式
24.下面结合附图和实施例详细说明本实用新型的实施方式。
25.如图1和图2所示,本实用新型为一种多功能机器人,包括行进体1、行进路网8和若干可移动射频卡。
26.行进体1的结构可参考图1,其外形可任意选择,为提高美观和趣味,一般采用人形或者汽车形,本实施例采用人形。行进体1是一种具有在平面上行走的机构,在本实施例中,采用驱动轮2作为其行进机构,显然,驱动轮2应具备转向功能。
27.行进路网8的结构可参考图2,其由若干x向路径和若干y向路径交错组成,即,每个路口均为90
°
交叉。这样设置的目的是便于控制,虽然其它角度的交叉路口也可以通过修改行进体1的相应转向角度实现,但这无疑大大提升了难度,对于少儿教具或玩具而言,并无太大必要。
28.本实用新型中,在行进体1的底部设置射频卡识别器4,可移动射频卡则设置在两个交点之间的路径上,可移动射频卡的标签包括启动、前进、左转、右转、后退和停止。在行进体1经过相应的可移动射频卡时,射频卡识别器4能够读取其标签,并交由行进体1的控制器执行相应的命令。
29.控制器是行进体1的内置装置,其输入端与射频卡识别器4连接获取其读取的可移动射频卡的标签,其控制端与驱动轮2的转向驱动电机连接。
30.本实用新型中,“两个交点”不仅仅指的是“相邻两个交点”,即,在相邻两个交点之间可以不设置可移动射频卡,但如果设置,则最多仅能设置一个可移动射频卡。
31.在本实用新型的其它实施例中,行进体1上还设置有语音识别模块3,此时,可关闭射频卡识别器4与控制器之间的信号关系,以语音命令控制行进体1做出相应的动作。
32.在本实用新型的其它实施例中,行进体1上还设置有红外循迹传感器6,红外循迹传感器6设置于行进体1的正面下方。此时,与之相配的方案,行进路网8的路径须呈黑色,以保证行进体1沿着路径行走。其具体原理,红外线在不同颜色的物体表面具有不同的反射强
度的特点,在机器人行驶过程中可利用发射管不断地向地面发射红外光,当红外光遇到黑色行进路径则红外光被吸收,机器人上的接收管接收不到红外光。控制器依据收到反射回来的红外光来确定黑色路径的位置和行走路线。因此,行进体1简单循迹时,一般装两个红外对管,即一对红外发射接收一体管即可。且两个发射管要在路径中间,因此要求两个对管的安装和路径的宽度要合适。对管输出端为高电平则表示对管在路径上,输出端为低电平则表示对管在路径外。由于路径是黑色的,能够吸收红外光,这样接收管没有接收到发射管发射的红外线,此时行进体1判断为检测到黑色路径。若右边的接收管检测到黑色路径,行进体1往右边运动(可通过控制左电机向前运动而右电机静止实现)。同样的道理,左边的接收管检测到到黑色路径,行进体1向左运动。
33.在本实用新型的其它实施例中,行进体1上设置有雷达传感器5和蜂鸣器7,雷达传感器5设置于行进体1的正面,雷达传感器5与控制器连接,当其探测到前方有障碍物时,控制器向蜂鸣器7输出告警信号,蜂鸣器7蜂鸣告警。蜂鸣器7也可在行进体1完成每个标签动作之后发出蜂鸣提示音。
34.本实用新型中,行进路网8的最边沿路径的末端可设置墙体,在雷达传感器5探测到与墙体的距离为s/2~s时,若经过s/2位置处仍未检测到转弯指令标签,则原地停止。
35.在本实用新型的其它实施例中,为便于统一的动作控制,行进路网8中的相邻交点之间路径的距离相等,也即,相邻x向路径的间距一与相邻y向路径的间距二是相等的。由此构成了一个规范的、矩阵化的路网结构。可移动射频卡则设置于相邻两个交点之间路径的中点位置。
36.可移动射频卡在路径上的设置,应尽量位于路径中央,且不影响行进体1的行走,本实用新型提供了三种可行的方式。第一种,路径上在设置可移动射频卡的位置开设凹槽,可移动射频卡直接放在凹槽中。显然,凹槽面积应大于可移动射频卡的面积,以便于取放。另一方面,凹槽的深度也不宜过深,可移动射频卡放入后,不至于凸起影响行进体1行走,又不影响射频卡识别器4的有效识别即可。第二种,采用粘贴布,并在中央位置设置夹层,可移动射频卡塞入该夹层中,粘贴布粘贴在路径上。第三种,采用磁力,路径上在设置可移动射频卡的位置有安装磁块,磁块可略低于路径表面,将可移动射频卡设置于铁板上或者无盖的铁盒中,通过铁板或铁盒与磁块实现安装。
37.本实用新型中,行进体1的速度为恒速,其控制器连接有延时器,当识别到某个可移动射频卡时,延时t秒输出相应动作指令。如果动作指令是前进,或者在前进中的左转或右转,则指令完成后,行进体1继续执行“前进”动作。如果动作指令是后退,或者在后退中的左转或右转,则指令完成后,行进体1继续执行“后退”动作。也即,左转或右转完成后,要继续其左转或右转之前的状态(前进或后退)。其中,t=s/2v,s是相邻两节点之间的距离,v是行进体1的恒定速度。
38.本实用新型中,可移动射频卡的上表面可设置简单图标,以便于使用者识别。例如,标签为前进的可移动射频卡,可标识
“→○”
,标签为后退的可移动射频卡,可标识
“○→”
等等,此系常规设置。
39.在本发明的一个具体实施例中,参考图2,使用者手持可移动射频卡,放置在行进路网8中的可设置位置,以引导行进体1的前行,例如,射频卡a的标签为“启动”,此处是行进体1的起始位置,起始时,行进体1面向x轴的正方向。“启动”后默认维持“前行”,之后读取到
射频卡b,若射频卡b为左转,则在下一交点位置处左转,完成左转后维持“前行”,直至读取到射频卡n,若射频卡n为“前行”,则继续前行直至读取到射频卡m,若射频卡m为“右转”,则在下一交点位置处右转,完成右转后维持“前行”,直至读取到射频卡f,然后根据射频卡f的标签执行下一动作。
40.根据该方案,可以在设置好起始位置与目的位置之后,由使用者设置不同的射频卡,从而规划行进体1的具体行进路线。例如设计起始位置为射频卡b所处位置,行进体1面向x轴的正方向。目的位置为射频卡i所处位置,并可设计必径位置,例如设计射频卡q所处位置为必经位置。此时可设计:
41.射频卡b标签为启动;射频卡c标签为左转;射频卡e标签为左转;射频卡f标签为左转;射频卡q标签为直行;射频卡p标签为右转;射频卡j标签为左转;射频卡i标签为停止。
42.实际设计的行进路网8中,每相邻的两个交点之间均预设有射频卡安装位置,在哪个位置安装哪个射频卡,则由使用者决定。
43.本实用新型的一种更简单形式,采用语音识别模块3部分或者完全替代射频卡识别器4。在部分替代时,语音指令的权限高于识别指令。在完全替代时,语音识别模块3识别少儿对所讲指令,指令同样为简单的“启动、前进、左转、右转、后退和停止”语音命令。根据该结构,当行进体1听到启动指令即开始行驶,听到前进即开始前进,听到左转指令即开始左转,听到右转指令即开始右转,听到后退指令即开始后退,听到停止指令即停止行驶。这样可以根据所听到的不同指令运行不同的状态和方向,有效提高少儿的语言表述能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1