基于柔性传感器的虚拟交互系统的制作方法
1.本实用新型涉及虚拟现实技术领域,具体是涉及基于柔性传感器的虚拟交互系统。
背景技术:
2.虚拟现实技术是融合三维显示技术、三维建模技术、传感测量技术和人机交互技术等多种前沿技术的综合技术。利用头盔显示器把用户的视觉封闭起来,产生虚拟视觉效果,让用户进入三维动态的沉浸式交互体验空间。采用头部、手部、眼部等跟踪器和语音识别器使系统尽可能实时。虚拟现实与人工智能、5g、物联网、大数据等技术融合,形成的临境系统是真实环境替代的理想模型。
3.当前很多商业vr设备使用加速度传感器为核心传感元件,由于陀螺仪和加速度计受到随机误差、零漂、温漂等影响,其测量值误差较大。在实际应用中,陀螺仪和加速度计的测量值在静止时一般也不会是零。因此,会导致虚拟物体的移动具有较大误差,且在实际应用中虚拟物体难以静止,不断抖动,此外传统的刚性传感器件也具有贴合度较差,生物相容性不好等问题,不适合人体的长期佩戴。因此需要一种更可靠、更舒适的方法来实现信号的获取。
4.由于微型可穿戴传感器、柔性材料、智能纺织品、微电子学和无线通信等技术推动,以柔性可穿戴传感器为基础的健康及运动监测设备得到极大发展。柔性传感技术可用于连续、实时、无创、精准地监测生命体征以及监测身体活动和位置,包括姿势、步态异常等。
5.现在的一些vr运动健身游戏,都是使用手柄、按键、键盘和鼠标等刚性设备来实现,但是这些外部设备基本都只涉及到手部、最多手臂部分的活动,还有一部分如跳舞毯之类的传感设备,主要只检测足部的活动,全身活动范围有限,很难达到全身健身的效果,而且体验感也不强。
6.现有的刚性传感器与皮肤贴合性差,形状相对固定,不能像织物一样自定义编织成任何形状,不能根据应用场景进行相适应的调整,佩戴不够舒适,适用的场景受到极大的限制;而现有的柔性传感器如一些导电织物,虽然十分柔软,可以根据需要改变形状,但是其拉伸强度差,在运动健康等需要全身大范围运动的场景中,因为关节活动较大,此时导电织物有限的拉伸程度就会制约传感器的使用,强行拉伸就会对导电织物传感器产生不可逆的破坏。
技术实现要素:
7.为解决上述问题,本实用新型提供了基于柔性传感器的虚拟交互系统,能够与人体紧密贴合且拉伸强度好。
8.本实用新型是这样实现的:基于柔性传感器的虚拟交互系统,包括:一电源模块、一柔性传感模块、一稳压模块、一数据采集模块及一vr设备模块,将所述电源模块、柔性传
感模块和稳压模块串联成一个完整的电流回路,所述数据采集模块分别与柔性传感模块和vr设备模块连接;
9.所述柔性传感模块为水凝胶柔性传感模块;将所述柔性传感模块编织成与四肢关节位置相贴合的结构后,穿戴在用户的四肢关节位置;
10.由所述柔性传感模块将用户在四肢关节活动时产生的机械信号转换电信号传输给所述数据采集模块,所述数据采集模块采集该电信号并传输给vr设备模块进行处理;将处理后的结果转换为控制游戏虚拟人物的运动指令,实现虚拟现实交互。
11.进一步的,所述柔性传感模块包括一左手肘传感单元、一右手肘传感单元、一左膝盖传感单元和一右膝盖传感单元,将所述左手肘传感单元编织成与左手肘位置相贴合的结构后,穿戴在左手肘位置;将所述右手肘传感单元编织成与右手肘位置相贴合的结构后,穿戴在右手肘位置;将所述左膝盖传感单元编织成与左膝盖位置相贴合的结构后,穿戴在左膝盖位置;将所述右膝盖传感单元编织成与右膝盖位置相适配的结构后,穿戴在右膝盖位置;
12.所述左手肘传感单元的两端分别与电源模块和稳压模块连接,所述右手肘传感单元的两端分别与电源模块和稳压模块连接,所述左膝盖传感单元的两端分别与电源模块和稳压模块连接,所述右膝盖传感单元的两端分别与电源模块和稳压模块连接;
13.且所述数据采集模块分别并联在左手肘传感单元的两端、右手肘传感单元的两端、左膝盖传感单元的两端和右膝盖传感单元的两端。
14.进一步的,所述左手肘传感单元、右手肘传感单元、左膝盖传感单元和右膝盖传感单元均包括复数根柔性传感器和复数根纤维,所述柔性传感器为水凝胶柔性传感器;复数根柔性传感器和复数根纤维通过平纹编织形成可穿戴式纺织品;每根所述柔性传感器的两端分别与电源模块和稳压模块连接,且所述数据采集模块分别并联在每根所述柔性传感器的两端。
15.进一步的,所述稳压模块包括一第一稳压单元、一第二稳压单元、一第三稳压单元和一第四稳压单元,所述第一稳压单元的两端分别与左手肘传感单元和电源模块连接,所述第二稳压单元的两端分别与右手肘传感单元和电源模块连接,所述第三稳压单元的两端分别与左膝盖传感单元和电源模块连接,所述第四稳压单元的两端分别与右膝盖传感单元和电源模块连接。
16.进一步的,所述第一稳压单元、第二稳压单元、第三稳压单元和第四稳压单元均为可调电阻。
17.进一步的,所述电源模块为dc电源。
18.进一步的,所述dc电源上设有一控制开关,所述控制开关分别与柔性传感模块和稳压模块连接。
19.进一步的,所述数据采集模块为数据采集卡。
20.进一步的,所述vr设备模块包括一信号处理单元和一显示界面,所述信号处理单元分别与显示界面和数据采集模块连接。
21.进一步的,所述信号处理单元为电脑。
22.本实用新型的有益效果是:本实用新型采用的柔性传感器为水凝胶柔性传感器,性能良好,成本低廉,尺寸小,重量轻,穿戴方便,能够与人体紧密贴合且拉伸强度好;与智
能纺织技术相结合,该柔性传感器可以很容易开发无感智能纺织品。相较于市面上各种以红外探头、加速度传感器等元件为主体的刚性vr信号输入设备,本产品在柔性可穿戴市场、智能服装、人机交互等领域的有着广阔的应用市场。此外,该产品通用性强,也为运动健康监测和智慧医疗和虚拟现实游戏等技术提供了新的思路。
附图说明
23.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
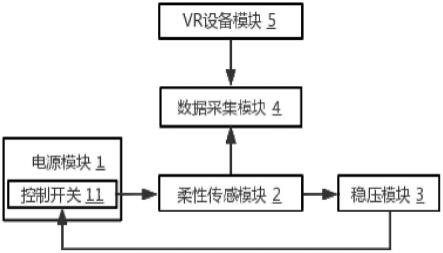
24.图1为本实用新型实施例提供的基于柔性传感器的虚拟交互系统的结构示意图。
25.图2为本实用新型实施例提供的柔性传感模块和稳压模块具体单元的结构示意图。
26.图3为本实用新型实施例提供的柔性传感器和纤维的编织结构示意图。
27.图中附图标识为:
28.1-电源模块、11-控制开关、2-柔性传感模块、21-左手肘传感单元、22-右手肘传感单元、23-左膝盖传感单元、24-右膝盖传感单元、25-柔性传感器、26-纤维、3-稳压模块、31-第一稳压单元、32-第二稳压单元、33-第三稳压单元、34-第四稳压单元、4-数据采集模块、5-vr设备模块。
具体实施方式
29.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。
30.如图1-图3所示,本实施例中的基于柔性传感器的虚拟交互系统,包括:一电源模块1、一柔性传感模块2、一稳压模块3、一数据采集模块4及一vr设备模块5,将所述电源模块1、柔性传感模块2和稳压模块3串联成一个完整的电流回路,所述数据采集模块4分别与柔性传感模块2和vr设备模块5连接;
31.所述柔性传感模块2为水凝胶柔性传感模块;将所述柔性传感模块2编织成与四肢关节位置相贴合的结构后,穿戴在用户的四肢关节位置;
32.由所述柔性传感模块2将用户在四肢关节活动时产生的机械信号转换电信号传输给所述数据采集模块4,所述数据采集模块4采集该电信号并传输给vr设备模块5进行处理;将处理后的结果转换为控制游戏虚拟人物的运动指令,实现虚拟现实交互。
33.该基于柔性传感器的虚拟交互系统,包括:电源模块1、柔性传感模块2、稳压模块3、数据采集模块4及vr设备模块5五个部分。将电源模块1、柔性传感模块2和稳压模块3串联
成一个完整的电流回路,确保整个系统能正常运行,数据采集模块4并联在柔性传感模块2上,由数据采集模块4采集柔性传感模块2产生的电信号,并传输给vr设备模块5进行信号处理。
34.在本实施例中,所述电源模块1为dc电源,用以给整个系统供电,dc电源为直流稳压电源,是能量转换电路,将220v、50hz的交流电转换为直流电,是构成电子电路的重要组成部分。在大多数情况下,直流电源的能量来自供电电网的交流电,其功能就是把交流电压转变成稳定的直流电压;
35.其中,所述dc电源上设有一控制开关11,所述控制开关11分别与柔性传感模块2和稳压模块3连接,通过dc电源的控制开关11来控制整个系统的开启和关闭;
36.在本实施例中,所述柔性传感模块2包括一左手肘传感单元21、一右手肘传感单元22、一左膝盖传感单元23和一右膝盖传感单元24,将所述左手肘传感单元21编织成与左手肘位置相贴合的结构后,穿戴在左手肘位置;将所述右手肘传感单元22编织成与右手肘位置相贴合的结构后,穿戴在右手肘位置;将所述左膝盖传感单元23编织成与左膝盖位置相贴合的结构后,穿戴在左膝盖位置;将所述右膝盖传感单元24编织成与右膝盖位置相适配的结构后,穿戴在右膝盖位置;由于本实用新型是要用于采集运动时的电信号,运动过程中是发生四肢活动的,所以最明显的变化就在于四肢,因此,需要在四肢部位穿戴对应的由柔性传感器制作而成的四肢传感单元,即左手肘传感单元21、右手肘传感单元22、左膝盖传感单元23和右膝盖传感单元24;
37.所述左手肘传感单元21的两端分别与电源模块1和稳压模块3连接,所述右手肘传感单元22的两端分别与电源模块1和稳压模块3连接,所述左膝盖传感单元23的两端分别与电源模块1和稳压模块3连接,所述右膝盖传感单元24的两端分别与电源模块1和稳压模块3连接;且所述数据采集模块4分别并联在左手肘传感单元21的两端、右手肘传感单元22的两端、左膝盖传感单元23的两端和右膝盖传感单元24的两端。
38.在本实施例中,所述左手肘传感单元21、右手肘传感单元22、左膝盖传感单元23和右膝盖传感单元24均包括复数根柔性传感器25和复数根纤维26,所述柔性传感器25为水凝胶柔性传感器;复数根柔性传感器和复数根纤维通过平纹编织形成可穿戴式纺织品;每根所述柔性传感器25的两端分别与电源模块1和稳压模块3连接,且所述数据采集模块4分别并联在每根所述柔性传感器25的两端。柔性传感器25为水凝胶材质,可塑性强,生物相容性好,其传感原理主要基于压阻效应,可以使用不同的模具,将柔性传感器25做成极细的纤维状,既能像普通织物一样与传统纺织品通过人工或者机器纺织成可穿戴的各种护膝、护腕、衣服等物品,又能单独使用一根柔性传感器25,使用方法灵活,适用范围广,可以实现舒适、智能的穿戴系统。
39.通过将柔性传感器25与传统纺织品相结合,并将其贴合在人体四肢关节,当四肢关节活动时,柔性传感器25拉伸产生形变,电阻发生变化,使得电路中电流及各部分器件的电压也产生变化,将人体运动的机械信号转化为电信号;数据采集模块4使用一个数据采集卡,将数据采集卡并联在柔性传感器25两端,当人体四肢关节活动时,收集柔性传感器25产生的电压信号,输入vr设备模块5进行处理。
40.在本实施例中,所述稳压模块3包括一第一稳压单元31、一第二稳压单元32、一第三稳压单元33和一第四稳压单元34,所述第一稳压单元31的两端分别与左手肘传感单元21
和电源模块1连接,所述第二稳压单元32的两端分别与右手肘传感单元22和电源模块1连接,所述第三稳压单元33的两端分别与左膝盖传感单元23和电源模块1连接,所述第四稳压单元34的两端分别与右膝盖传感单元24和电源模块1连接。所述第一稳压单元31、第二稳压单元32、第三稳压单元33和第四稳压单元34分别与左手肘传感单元21、右手肘传感单元22、左膝盖传感单元23和右膝盖传感单元24一一对应设置,因为需要对四肢部位在活动前后的电压差进行相应调节,因为每个传感单元都要配一个对应的稳压单元的电阻进行调节。
41.在本实施例中,所述第一稳压单元31、第二稳压单元32、第三稳压单元33和第四稳压单元34均为可调电阻,其作用是限制电路中的电流和电压在设备接受的范围内,避免因某些设备取值不合理或者疏忽导致过大的电流和电压烧坏设备;另一方面,可以通过调整电源模块1的输出电压大小和稳压模块3的电阻阻值大小,从而对柔性传感器25的精度进行调整,用以适应不同的应用场景;当运动前后产生的电压差大于设置的电压阈值n%时,(n值自行设定,本实施例中取10%)才能更好地区分手肘和膝盖在弯曲前和弯曲后两种状态,而当电压差不大于电压阈值n%时就要调整电压差,此时是调节稳压模块3中电阻的阻值大小来增大电压差,因此,这里采用可调电阻能更方便调节电阻的阻值。
42.在本实施例中,所述数据采集模块4为数据采集卡,并联在柔性传感器25两端,用于当人体四肢关节活动时,收集柔性传感器25产生的电压信号,并输入vr设备模块5进行处理;
43.在本实施例中,所述vr设备模块5包括一信号处理单元51和一显示界面52,所述信号处理单元51分别与显示界面52和数据采集模块4连接,所述信号处理单元51为电脑,内置有labview可视化软件和unity程序;电信号通过数据采集卡上传到信号处理单元51后,由信号处理单元51的labview可视化软件进行处理,在labview可视化软件中将原始的电压信号进行滤波,并通过对比和求导方法处理,然后把处理后的结果传输到在unity程序中,实现对游戏虚拟人物左移、右移、走路、跑步、停止的控制。
44.具体的,当左手肘弯曲时,引起该部位左手肘传感单元21内的柔性传感器25两端电压差值达到一定数值,设定高低电压的中间值为一个电压阈值,那么弯曲手肘时必然导致电压变化超过电压阈值,此时labview可视化软件发出处理结果给unity程序,控制游戏虚拟人物左移,并在显示界面52中显示;控制游戏虚拟人物右移的原理与控制游戏虚拟人物左移的原理相同。
45.当交替抬腿弯曲膝盖即原地踏步时,两膝盖处的柔性传感器25会交替发出电信号,且发出的信号如正弦信号一般上下起伏,当一个膝盖弯曲时,发出的信号处于最高值附近,另一个膝盖伸直,发出的信号处于最低值附近,那么就可以通过对比一膝盖弯曲时产生电压最高值的当前时刻与另一个膝盖弯曲时产生电压最高值的最近的下一时刻之间的时间差,设定一个时间范围,当这个时间差处于这个时间范围内,就判定用户处于静止状态,labview可视化软件发出处理结果给unity程序,控制游戏虚拟人物行进。
46.游戏虚拟人物的行进分为三种状态:走路前进(慢速前进)和跑步前进(快速前进)和停止。三种状态的区别在于双腿弯曲的频率,频率高时,左膝盖和右膝盖两个的柔性传感器25在一膝盖弯曲时产生电压最高值的当前时刻与另一个膝盖弯曲时产生电压最高值的最近的下一时刻之间产生的的时间差变小,我们设置一个跑步时间范围如0~0.5s,时间差在此跑步时间范围内,unity程序识别为跑步前进,控制游戏虚拟人物跑步前进;频率低时,
左膝盖和右膝盖两个的柔性传感器25在一膝盖弯曲时产生电压最高值的当前时刻与另一个膝盖弯曲时产生电压最高值的最近的下一时刻之间产生的时间差变大,我们设置一个走路时间范围如0.5~1s,时间差在此走路时间范围内,unity程序识别为走路前进,控制游戏虚拟人物走路前进;频率进一步降低时,用户处于静止状态时,左膝盖和右膝盖两个的柔性传感器25在一膝盖弯曲时产生电压最高值的当前时刻与另一个膝盖弯曲时产生电压最高值的最近的下一时刻之间产生的时间差进一步变大,我们设置一个停止时间范围如大于1s,时间差超过1s后,unity程序识别为停止,控制游戏虚拟人物停止。通过开发unity程序,将labview可视化软件处理后的电压信号转换为控制虚拟人物左移、右移、走路前进、跑步前进、停止的指令,实现虚拟现实交互。
47.该基于柔性传感器的虚拟交互系统通过肢体运动使得柔性传感器产生形变,产生相应的电信号,实现动作捕捉的目的。而且在制备柔性传感器时,通过改变原材料的比例以及后期处理方法的调整,可以根据实际需要,对柔性传感器的韧性和灵敏度等进行改变。此外,该系统有望替代手柄,成为下一代虚拟现实设备手势交互的关键输入设备。
48.本实用新型是在vr运动健身游戏场景中,在四肢关节处佩戴由柔性传感器25和纤维26组合的传感单元,即在左手肘上佩戴左手肘传感单元,在右手肘上佩戴右手肘传感单元,在左膝盖上佩戴左膝盖传感单元,在右膝盖上佩戴右膝盖传感单元;从而通过四肢的活动来直接操控虚拟游戏中的人物。由于此时人物控制需要用户四肢参与,可以直接带动用户全身活动,因此在设置好虚拟游戏场景后,就可以基于这一套柔性传感器的虚拟交互系统实现用vr游戏来运动健身的效果。
49.本实用新型可以解放双手,只需要活动四肢,就像正常的运动健身一样,能够带来更真实体验,加强用户的沉浸感,而且能够调动用户全身参与,真正实现运动健身的目的。而且柔性传感器的体积更小,重量轻,成本也低,相比于市面上的产品,有更强的竞争力。
50.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1