一种踏步机器人的制作方法
1.本实用新型涉及医疗、康复技术领域,具体涉及一种踏步机器人。
背景技术:
2.脑卒中、脑外伤、脑肿瘤、周围神经系统疾病等神经损伤等原因引起的偏瘫、截瘫或上下肢功能障碍、骨伤科疾病或者其它一些运动功能障碍,都会使得患者生活难以自理,严重影响患者的生活质量,也给患者家庭和社会造成沉重的负担。对于这些患者通常需要进行康复训练,综合、协调地应用各种措施,消除或减轻病、伤、残者身心及社会功能障碍,增强其自立能力,改变其生活状态,使其最终重返社会、提高生活质量。其中,探索改善患者运动功能障碍的康复技术和设备,一直是康复工作者努力研发的方向。
3.随着科技的进步,智能化技术不断融入到康复设备之中。对于患者需要下肢进行踏步的运动,目前康复训练机器人的机台都是供患者站在上面进行踏步运动的,不适用于一些难以站立的患者。
技术实现要素:
4.本实用新型的目的在于克服现有技术中的缺点与不足,提供一种踏步机器人。
5.本实用新型的一个实施例提供一种踏步机器人,包括:机架、床体、两个腿托组件和踏步组件,所述两个腿托组件和所述踏步组件沿远离所述床体的头端的方向依序布置,所述两个腿托组件并排布置;
6.所述腿托组件包括主体、腿部托架以及第一复位弹性件,所述主体与所述床体转动连接,所述主体上设置有第一导轨,所述腿部托架通过连接件与所述第一导轨活动连接,所述腿部托架与所述连接件转动连接,所述第一复位弹性件的两端分别与所述主体和所述连接件连接,所述腿部托架沿所述第一导轨移动后,所述第一复位弹性件产生弹性形变。
7.相对于现有技术,本实用新型的踏步机器人能够让患者躺在床体上进行踏步运动,利用腿托组件稳定支撑患者的腿部,腿托组件能够适应患者在踏步运动时腿部的运动姿态,避免患者运动过程脱离腿托组件,提高安全性。
8.在一些可选的实施方式中,所述床体与所述机架转动连接,所述机架上设置有旋转驱动组件,所述旋转驱动组件与所述床体传动连接。
9.在一些可选的实施方式中,所述机架上还设置有气弹簧,所述气弹簧与所述床体连接,位于所述床体的转动路径上。
10.在一些可选的实施方式中,所述机架上还设置有调节立柱和物品托架,所述物品托架活动设置在所述调节立柱上,沿所述调节立柱升降。
11.在一些可选的实施方式中,所述床体的头端设置有头枕,所述头枕通过若干伸缩杆与所述床体连接,所述伸缩杆在靠近或者远离所述床体的方向伸缩。
12.在一些可选的实施方式中,所述腿托组件还包括伸缩组件,所述伸缩组件的伸缩端与所述主体传动连接,推动所述主体摆动。
13.在一些可选的实施方式中,所述腿部托架包括支撑座、支撑托和第一锁定机构,所述支撑座与所述连接件连接,所述支撑座上设置有第一横向调节轨道,所述支撑托与所述第一横向调节轨道活动连接,所述第一锁定机构设置在所述支撑座上,与所述支撑托锁定配合。
14.在一些可选的实施方式中,所述支撑托上设置有若干第一限位槽;
15.所述支撑座内设置有若干第一活动通道和第一滑槽,所述第一活动通道与所述第一滑槽连接,并且向所述第一横向调节轨道延伸;
16.所述第一锁定机构包括第一操作件和若干第一锁紧块,所述第一锁紧块活动设置在所述第一活动通道内,所述第一操作件活动伸入所述第一横向调节轨道,所述第一操作件上设置有若干凸出的第一压紧部,所述第一操作件沿所述第一滑槽移动后,所述第一压紧部推动第一锁紧块,使得所述第一锁紧块伸入所述支撑托上的第一限位槽。
17.在一些可选的实施方式中,所述踏步组件包括第二导轨、第二复位弹性件和两个脚踏板,所述第二导轨设置在所述床体上,所述脚踏板通过活动座与所述第二导轨活动连接,所述第二复位弹性件分别与所述床体和所述活动座连接,所述活动座沿所述第二导轨移动后,所述第二复位弹性件产生弹性形变,所述两个脚踏板与所述活动座转动连接。
18.在一些可选的实施方式中,所述脚踏板包括支撑板和转动座,所述转动座上设置有第二横向调节轨道和第二锁定机构,所述支撑板与所述第二横向调节轨道活动连接,所述第二锁定机构与所述支撑板锁定配合;所述转动座与所述活动座转动连接。
19.在一些可选的实施方式中,所述支撑板上设置有若干第二限位槽;
20.所述转动座内设置有若干第二活动通道和第二滑槽;
21.所述第二锁定机构包括第二操作件和若干第二锁紧块,所述第二活动通道与所述第二滑槽连接,并且向所述第二横向调节轨道延伸,所述第二锁紧块活动设置在所述第二活动通道内,所述第二操作件活动伸入所述第二横向调节轨道,所述第二操作件上设置有若干凸出的第二压紧部,所述第二操作件沿所述第二滑槽移动后,所述第二压紧部推动第二锁紧块,使得所述第二锁紧块伸入所述支撑板上的第二限位槽。
22.在一些可选的实施方式中,所述床体上设置有调节座和平移驱动机构,所述调节座设置在所述床体的尾端,所述平移驱动机构与所述调节座连接,驱动所述调节座靠近或者远离所述床体,所述踏步组件设置在所述调节座上。
23.在一些可选的实施方式中,所述平移驱动机构包括调节手轮和若干调节丝杆,所述调节手轮设置在所述床体的一侧,所述调节丝杆设置在所述床体上,与所述调节手轮传动连接,与所述调节座螺纹连接。
24.为了能更清晰的理解本实用新型,以下将结合附图说明阐述本发明的具体实施方式。
附图说明
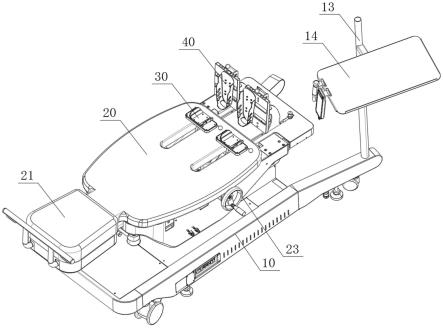
25.图1是本实用新型一个实施例的踏步机器人的结构示意图;
26.图2是本实用新型一个实施例的踏步机器人在隐藏部分结构时的一侧的结构示意图;
27.图3是本实用新型一个实施例的腿托组件和床体在隐藏部分结构时的结构示意
图;
28.图4是本实用新型一个实施例的腿托组件的结构示意图;
29.图5是本实用新型一个实施例的腿部托架的剖视图;
30.图6是本实用新型一个实施例的踏步组件、平移驱动机构和调节座的结构示意图;
31.图7是本实用新型一个实施例的踏步组件、平移驱动机构和调节座的一侧的结构示意图;
32.图8是本实用新型一个实施例的脚踏板的剖视图。
33.附图标记说明:
34.10、机架;11、旋转驱动组件;12、气弹簧;13、调节立柱;14、物品托架;20、床体;21、头枕;211、伸缩杆;22、调节座;23、平移驱动机构;231、调节手轮;232、调节丝杆;30、腿托组件;31、主体;32、腿部托架;321、连接件;3211、导向杆;322、支撑座;3221、第一活动通道;3222、第一滑槽;323、支撑托;3231、第一限位槽;324、第一锁定机构;3241、第一操作件;3242、第一锁紧块;3243、第一压紧部;325、第一横向调节轨道;33、第一复位弹性件;34、第一导轨;35、伸缩组件;40、踏步组件;41、第二导轨;42、第二复位弹性件;43、活动座;44、脚踏板;441、支撑板;4411、第二限位槽;442、转动座;4421、第二活动通道;4422、第二滑槽;443、第二横向调节轨道;444、第二锁定机构;4441、第二操作件;4442、第二锁紧块;4443、第二压紧部。
具体实施方式
35.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
36.请参阅图1,其是本实用新型一个实施例的踏步机器人的结构示意图,该踏步机器人,包括:机架10、床体20、两个腿托组件30和踏步组件40,两个腿托组件30和踏步组件40沿远离床体20的头端的方向依序布置,两个腿托组件30并排布置。为了方便布置腿托组件30,床体20上开设有供腿托组件30移动的通槽,腿托组件30从床体20的底部穿过通槽伸到床体20的上方。
37.请参阅图2至图4,图2是本实用新型一个实施例的踏步机器人在隐藏部分结构时的一侧的结构示意图,图3是本实用新型一个实施例的腿托组件和床体在隐藏部分结构时的结构示意图,图4是本实用新型一个实施例的腿托组件的结构示意图,腿托组件30包括主体31、腿部托架32以及第一复位弹性件33,主体31与床体20转动连接,主体31上设置有第一导轨34,腿部托架32通过连接件321与第一导轨34活动连接,腿部托架32与连接件321转动连接,从而适应患者腿部的角度,第一复位弹性件33的两端分别与主体31和连接件321连接,腿部托架32沿第一导轨34移动后,第一复位弹性件33产生弹性形变,患者进行踏步运动时,腿部托架32支撑患者的腿部,由于腿部会在水平方向上会在一定范围内往复移动的同时,还存在上下移动,腿部托架32通过沿第一导轨34反复移动以及主体31的上下摆动,从而适应腿部的运动姿态,使得腿部托架32能够在训练过程中始终支撑患者腿部。
38.第一导轨34可以根据实际需要选择合适的设计,例如,在本实施方式中,第一导轨
34为滑槽,连接件321上设置有条形的导向杆3211,导向杆3211与滑槽滑动连接。当然,第一导轨34还可以采用导轴、凸轨等结构。
39.在一些可选的实施方式中,腿托组件30还包括伸缩组件35,伸缩组件35的伸缩端与主体31传动连接,推动主体31摆动,通过伸缩组件35推动主体31在一定范围内摆动,进而主动抬升患者的腿部,在患者肌力不足的情况下为患者踏步运动训练时提供助力,还能够实现患者被动运动。伸缩组件35可以根据实际需要选择合适的设计,例如采用气缸、电动缸、液压缸等等。
40.请参阅图5,其是本实用新型一个实施例的腿部托架的剖视图,为了方便腿托适应不同体型的人群,在一些可选的实施方式中,腿部托架32包括支撑座322、支撑托323和第一锁定机构324,支撑座322与连接件321连接,支撑座322上设置有第一横向调节轨道325,支撑托323与第一横向调节轨道325活动连接,使得支撑托323可以沿第一横向调节轨道325调节位置,使得两个腿托组件30的支撑托323可以相互靠近或彼此远离,第一横向调节轨道325的延伸方向应该与床体20的延伸方向大致垂直;第一锁定机构324设置在支撑座322上,与支撑托323锁定配合。患者的腿部放置在支撑托323上,调节支撑托323位置可以适应患者的体型。
41.第一横向调节轨道325可以根据实际需要选择合适的设计,例如采用导轴、凸轨、滑槽等结构。
42.其中,第一锁定机构324的结构可以根据实际需要来设计,例如,第一锁定机构324包括螺纹锁紧件,螺纹锁紧件与支撑座322螺纹连接,螺纹锁紧件旋转后抵压或者松开支撑托323。在本实施方式中,支撑托323上设置有若干第一限位槽3231,第一锁定机构324包括第一操作件3241和若干第一锁紧块3242,支撑座322内设置有若干第一活动通道3221和第一滑槽3222,第一活动通道3221与第一滑槽3222连接,并且向第一横向调节轨道325延伸,第一锁紧块3242活动设置在第一活动通道3221内,第一操作件3241活动伸入第一横向调节轨道325,第一操作件3241上设置有若干凸出的第一压紧部3243,第一操作件3241沿第一滑槽3222移动后,第一压紧部3243推动第一锁紧块3242,使得第一锁紧块3242伸入支撑托323上的第一限位槽3231,从而实现支撑托323的锁定,在需要调节支撑托323的时候,移动第一操作件3241,使得第一压紧部3243脱离第一锁紧块3242,然后移动支撑托323以使第一锁紧块3242脱离第一限位槽3231,第一限位槽3231的侧壁可以设置成斜面,方便通过移动支撑托323来让第一锁紧块3242顺畅脱离第一限位槽3231。在设置有多个第一活动通道3221时,多个第一活动通道3221沿第一横向调节轨道325的延伸方向布置,可以选择在其中几个第一活动通道3221内设置第一锁紧块3242,使得支撑托323移动在不同位置都能有第一锁紧块3242与第一限位槽3231配合锁紧。在设置有多个第一限位槽3231时,多个第一限位槽3231沿第一横向调节轨道325的延伸方向布置,使得支撑托323移动在不同位置都能有第一限位槽3231供第一锁紧块3242伸入实现配合锁紧。在本实施方式中,对应设置有多个第一活动通道3221和多个第一限位槽3231。
43.在一些可选的实施方式中,床体20与机架10转动连接,机架10上设置有旋转驱动组件11,旋转驱动组件11与床体20传动连接。旋转驱动组件11可以根据实际需要选择合适的设计,例如,旋转驱动组件11采用气缸、电动缸、液压缸等等,其设置在机架10上,通过输出端推动床体20转动。旋转驱动组件11也可以采用电机,通过电机驱动床体20转动。
44.在一些可选的实施方式中,机架10上还设置有气弹簧12,气弹簧12与床体20连接,位于床体20的转动路径上。气弹簧12在床体20转动时对床体20提供缓冲和支撑作用。
45.在一些可选的实施方式中,机架10上还设置有调节立柱13和物品托架14,物品托架14活动设置在调节立柱13上,沿调节立柱13升降。物品托架14可以放置电脑等电子设备,当然,也可放置其它的物件。物品托架14可以通过锁紧环与调节立柱13套接,锁紧环上设置螺纹件,螺纹件活动抵压调节立柱13,或者通过螺纹件缩小锁紧环的内径而使得锁紧环锁紧在调节立柱13上。
46.在一些可选的实施方式中,床体20的头端设置有头枕21,头枕21通过若干伸缩杆211与床体20连接,伸缩杆211在靠近或者远离床体20的方向伸缩,从而调节头枕21距离床体20的位置,适应患者身型。
47.请参阅图6至图7,图6是本实用新型一个实施例的踏步组件、平移驱动机构和调节座的结构示意图,图7是本实用新型一个实施例的踏步组件、平移驱动机构和调节座的一侧的结构示意图,在一些可选的实施方式中,踏步组件40包括第二导轨41、第二复位弹性件42和两个脚踏板44,第二导轨41设置在床体20上,脚踏板44通过活动座43与第二导轨41活动连接,第二复位弹性件42分别与床体20和活动座43连接,活动座43沿第二导轨41移动后,第二复位弹性件42产生弹性形变,两个脚踏板44与活动座43转动连接,从而使得脚踏板44能够适应患者运动时脚部的倾斜。
48.第二导轨41可以根据实际需要选择合适的设计,例如,在本实施方式中,第二导轨41为凸轨,活动座43通过滑块与凸轨滑动连接。当然,第二导轨41还可以采用导轴、滑槽等结构。
49.请参阅图8,其是本实用新型一个实施例的脚踏板的剖视图,在一些可选的实施方式中,脚踏板44包括支撑板441和转动座442,转动座442上设置有第二横向调节轨道443和第二锁定机构444,支撑板441与第二横向调节轨道443活动连接,第二锁定机构444与支撑板441锁定配合;转动座442与活动座43转动连接,支撑板441可以沿第二横向调节轨道443调节位置,使得两个支撑板441可以相互靠近或彼此远离,患者脚踩在支撑板441上,调节支撑板441位置可以适应患者的体型,第二横向调节轨道443的延伸方向应该与床体20的延伸方向大致垂直。
50.其中,第二锁定机构444的结构可以根据实际需要来设计,例如,第二锁定机构444包括螺纹锁紧件,螺纹锁紧件与活动座43螺纹连接,螺纹锁紧件旋转后抵压或者松开支撑板441。在本实施方式中,支撑板441上设置有若干第二限位槽4411,第二锁定机构444包括第二操作件4441和若干第二锁紧块4442,转动座442内设置有若干第二活动通道4421和第二滑槽4422,第二活动通道4421与第二滑槽4422连接,并且向第二横向调节轨道443延伸,第二锁紧块4442活动设置在第二活动通道4421内,第二操作件4441活动伸入第二横向调节轨道443,第二操作件4441上设置有若干凸出的第二压紧部4443,第二操作件4441沿第二滑槽4422移动后,第二压紧部4443推动第二锁紧块4442,使得第二锁紧块4442伸入支撑板441上的第二限位槽4411,从而实现支撑板441的锁定,在需要调节支撑板441的时候,移动第二操作件4441,使得第二压紧部4443脱离第二锁紧块4442,然后移动支撑板441以使第二锁紧块4442脱离第二限位槽4411,第二限位槽4411的侧壁可以设置成斜面,方便通过移动支撑板441来让第二锁紧块4442顺畅脱离第二限位槽4411。在设置有多个第二活动通道4421时,
多个第二活动通道4421沿第二横向调节轨道443的延伸方向布置,可以选择在其中几个第二活动通道4421内设置第二锁紧块4442,使得支撑板441移动在不同位置都能有第二锁紧块4442与第二限位槽4411配合锁紧。在设置有多个第二限位槽4411时,多个第二限位槽4411沿第二横向调节轨道443的延伸方向布置,使得支撑板441移动在不同位置都能有第二限位槽4411供第二锁紧块4442伸入实现配合锁紧。在本实施方式中,对应设置有多个第二活动通道4421和多个第二限位槽4411。
51.在一些可选的实施方式中,床体20上设置有调节座22和平移驱动机构23,调节座22设置在床体20的尾端,平移驱动机构23与调节座22连接,驱动调节座22靠近或者远离床体20,踏步组件40设置在调节座22上,通过移动调节座22的位置来调节踏步组件40与床体20之间的距离,从而适应不同身型的患者。本实施方式中,踏步组件40的第二导轨41、第二复位弹性件42、活动座43和脚踏板44均位于调节座22上。
52.在一些可选的实施方式中,平移驱动机构23包括调节手轮231和若干调节丝杆232,调节手轮231设置在床体20的一侧,调节丝杆232设置在床体20上,与调节手轮231传动连接,与调节座22螺纹连接,转动调节手轮231进而带动调节丝杆232转动,进而驱动调节座22移动。患者躺在床体20上时可以直接操作调节手轮231来移动调节座22的位置,从而方便患者自行调节踏步组件40到合适的位置,提高用户体验。由于调节座22较大,为了提高稳定性,在设置多个调节丝杆232时,调节手轮231可以通过锥形齿轮结构与各个丝杆传动连接。
53.第一横向调节轨道325和第二横向调节轨道443可以根据实际需要选择合适的设计,例如可以采用凸轨、导轴、滑槽等结构。在本实施方式中,第一横向调节轨道325和第二横向调节轨道443均为滑槽,第一横向调节轨道325与第一活动通道3221连通,第二横向调节轨道443与第二活动通道4421连通。
54.第一复位弹性件33和第二复位弹性件42可以根据实际需要选择合适的设计,例如可以采用弹簧。
55.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1