模拟马术训练装置及其人体姿态计算方法与流程
本发明涉及康复训练及智能化相结合领域,尤其涉及模拟马术训练装及其人体姿态计算方法。
背景技术:
1、现有的模拟马术训练产品,可以实现马术运动的部分动作的模拟,但智能化不足,市面上主要用于马术训练,使用场景为马术俱乐部,没有专门针对康复的产品,无针对康复训练的模拟马产品,不能实现人马互动,不能及时反馈患者训练的状态,无患者防护装置,不适用于康复训练。
2、在训练过程中也不能及时反馈训练状态,不能实现患者与设备的互动,都是固定动作,人在马上做被动运动。在训练完成后不能提供准确的的训练效果等信息,比如姿态的变化,医生不能对病人的训练效果进行评估和对下一步的训练内容进行调整,智能化的人机交互能力的缺失是现有产品的重大缺陷,另外缺少防护装置,不适合患者使用。
技术实现思路
1、为解决上述问题,本发明公开了模拟马术训练装置,用于脑瘫、小儿麻痹、学习障碍、孤独症谱系障碍、发育迟缓儿童、注意力缺陷等患者,实用性强;实现了智能化人机交互,利用马的步态运动模式及人马互动的所有活动,针对各种功能障碍和神经肌肉疾患病人的躯体、心理、认知、社会化及行为障碍进行治疗的一种康复治疗手段,它是为了实现最终的功能性康复目标所实施的全面整体康复训练项目中很重要的一部分。
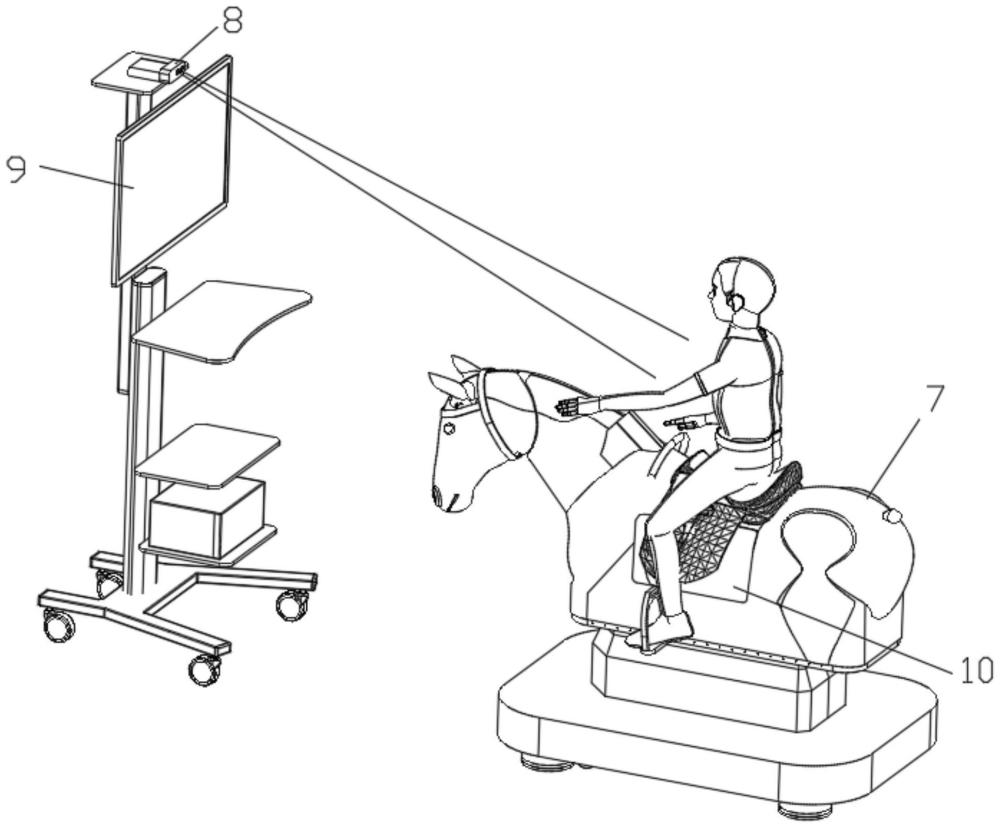
2、模拟马术训练装置,包括显示器和位于显示器旁的马壳体,显示器设置在移动支架上;所述移动支架的顶部设有双目摄像头装置,其中所述马壳体罩设在模拟马术训练内部装置上且外表面设有马肚压力装置;所述模拟马术训练内部装置包括伺服四电缸平台装置、马背压力装置、脚蹬压力装置、扶手压力装置、马脖转动装置和马头转动装置;其中双目摄像头装置是一种利用两个摄像头同时拍摄同一场景的相机,它可以模拟人类双眼视觉,从而实现深度感知和三维重建。通过对两个摄像头拍摄的图像进行处理,可以得到场景的深度信息和三维结构。双目摄像头装置成像原理基于视差原理。视差是指当两个眼睛看到同一物体时,由于它们的位置不同,所以看到的图像也不同。这种差异就是视差。视差越大,物体离观察者越近﹔视差越小,物体离观察者越远。双目相机利用这种原理,通过计算两个摄像头拍摄的图像之间的视差,来确定物体的深度信息,从而准确捕捉患者身体骨骼的偏移角度变化,了解其躯干稳定性的改善情况。
3、进一步的,所述伺服四电缸平台装置包括底座,第一电动缸,第二电动缸,第三电动缸,第一活动平台,第四电动缸,轴承座,导轨滑块和第二活动平台;其中底座通过地脚固定于地面上,并装有四个万向脚轮用于移动;第一伺服电动缸、第二伺服电动缸、第三伺服电动缸的底端分别以等腰三角形式铰接于底座上且顶端均与第一活动平台球铰接,所述第四伺服电动缸与第一活动平台的顶部铰接,所述导轨滑块副安装在第一活动平台的侧端,所述第二活动平台位于第一活动平台的上方且两端通过滑块与导轨滑块副滑动适配;第四伺服电动缸铰接固定在第二活动平台上;通过四个电动缸伸缩长度的变化,从而控制第二活动平台的摆动。从而模拟马的慢步,快步,跑步,跳跃,转弯,上下坡等动作方式。
4、进一步的,马背压力装置固定在第二活动平台上并包括第一压力传感器和支撑板;其中四个第一压力传感器均匀的呈矩形排布固定于第二活动平台上,每个第一压力传感器的另一端安装支撑板。患者坐于马壳上,通过四个传感器读数的变化,从而计算出患者的重心位置。可以通过屏幕上的视觉反馈患者的体重分布情况,感应患者重心的前倾,后倾和侧倾,清楚的表明患者的平衡与骑姿,可以纠正患者的姿势,定位和平衡。
5、进一步的,所述脚蹬压力装置包括第二压力传感器,马壳固定板,脚蹬,第一织带,织带连接板,第一支架,第二织带和第二支架;马壳固定板固定在支撑板的顶部;两个第二压力传感器固定于支撑板上,每个所述第二压力传感器的另一端连接第二织带,第二织带通过第二支架与第一支架连接到织带连接板上,脚蹬通过第一织带与织带连接板连接。患者脚部受力时,传感器可监测到其压力值的变化。
6、进一步的,马肚压力装置包括马肚和第三压力传感器,其中四个第三压力传感器固定于马壳体对应的端部且另一端均与马肚固定;当马肚受到腿部夹紧力时,传感器可实时检测到其数值,并显示在显示器上。
7、进一步的,扶手压力装置包括扶手安装板,扶手,扭力传感器扶手安装轴和深沟球轴承;其中扭力传感器固定于扶手安装板上,扶手一端与扭力传感器固定且另一端依次经过扶手安装轴、深沟球轴承并与扶手安装板铰接。患者训练时手握住扶手,身体前后晃动时抓握扶手的扭力会发生变化,变化值会被扭力传感器读取。然后在显示器可看到其变化。
8、进一步的,马脖转动装置与马头转动装置其转动连接;所述马脖子转动装置包括电动推杆,马头连杆,第二导轨滑块,马脖安装板和单圈电位器;所述马头转动装置包括马头安装板,第四压力传感器,压缩弹簧,缓冲垫和缰绳;其中马脖转动装置为平行四边形四连杆结构,扶手安装板固定于第二活动平台上,马脖安装板的一端与扶手安装板的一端转动连接,在其转轴上装有单圈电位器,马头连杆与扶手安装板的一端连接,电动推杆的一端与扶手安装板铰接,电动推杆另一端与马头连杆铰接,马头连杆上装有第二导轨滑块,第二导轨滑块的导轨一端与马头安装板铰接,导轨上装有压缩弹簧,马头安装板一端与马脖安装板铰接且另一端两侧分别安装有第四压力传感器,第四压力传感器与缰绳进行连接。
9、本发明通过电动推杆的伸缩从而使马脖安装板与马头连杆同步进行转动,转动的角度通过单圈电位器进行读取并在显示器实时显示,马脖的转动为适应不同身高的患者更好的观看显示器的画面。当平台前后加速运动时,马头安装板会受到惯性力作用,使弹簧压缩,从而使马头进行摆动,从而模拟出真实马跑步的效果。患者双手可拉动缰绳,两侧第四压力传感器的受力都可以被检测到,根据两侧受力的不同,可以判断出患者想要向哪边转弯的意愿,更好的实现人机互动。
10、进一步的,其中靠背防护装置包括靠背支架,靠背垫,胸部绑带,导轨滑块,球形连杆,连杆和固定螺母;靠背垫与靠背支架进行固定,在马壳体预留安装孔,连杆固定在支撑板上,球形连杆固定在连杆上,靠背支架的一端为球面,并与球形连杆球面接触,固定螺母的一面为球面并通过螺纹固定于靠背支架上,靠背支架与靠背垫通过导轨滑块连接;对于活动能力不强的患者,调整好坐姿背部靠在靠背垫上,然后用胸部绑带将身体进行固定,绑带两端连接于靠背垫上,患者骑乘时可以前后、左右倾斜一定角度,并可以上下活动一定范围,不影响骑乘时的身体活动并可以防止跌落。
11、进一步的,所述马甲防护装置包括防摔马甲,网架和吊柱;网架通过吊柱固定于房顶,患者穿上特制的防摔马甲,并通过吊绳固定于网架的合适位置。网架结构更好的根据患者的需求进行吊点的调整,吊绳保持松弛状态,不影响骑乘时的身体活动。
12、本发明工的工作原理是:伺服四电缸平台用于模拟马的动作以便使用者进行马术训练,模拟马的步态(慢步、快步和慢跑)、跳跃动作、拐弯、上下坡;马背压力装置用于实时监测患者的重心位置,可以通过屏幕上的视觉反馈患者的体重分布情况,感应患者重心的前倾,后倾和侧倾,清楚的表明患者的平衡与骑姿,可以纠正患者的姿势,定位和平衡;脚蹬压力装置用于实时监测患者脚部受力情况;马肚压力装置用于实时监测患者有无加速意向,这些传感器可让患者通过腿部施压来控制骑马器的运动,从慢步,到快步,再到慢跑动作。模拟器也可从慢跑模式直接停止。扶手压力装置用于实时监测患者手臂受力情况,采集患者抓握扶手的力,判断患者身体放松程度;马脖转动装置用于调节马头的高低以便适应不同身高患者使用,而不影响观看显示画面;马头转动装置用于模拟马奔跑过程中头部的摆动,并通过缰绳传感器判断患者需要转弯的意愿,通过正确使用缰绳来判断头部和颈部弯曲程度,控制马在慢步、快步和慢跑时的身体横向倾斜,可以通过屏幕上的视觉反馈给患者;通过双目摄像机装置捕捉身体骨骼的偏移角度变化,了解其躯干稳定性的改善情况。
13、本实施例还提供摄像头的识别方法,具体为:当相机捕捉到深度图像和rgb图像后,它使用了多种技术来实现骨骼追踪和人体识别。
14、首先通过深度传感器:相机配备了深度传感器,它使用红外光和相机来测量场景中物体的距离。深度传感器通过发射红外光并检测其返回时间来计算物体与相机之间的距离。这样,它可以生成一幅深度图像,其中每个像素的值表示该像素到相机的距离。
15、rgb摄像头:除了深度传感器,相机还配备了一台rgb摄像头,用于捕捉场景的彩色图像。rgb图像提供了物体的纹理和颜色信息,用于后续的处理和分析。
16、分割遮罩技术:相机使用分割遮罩技术将深度图像中的人体与背景分离。这个过程使用了深度图像的连通区域分析和像素分类等技术,将人体区域标记为前景,而将背景区域标记为背景。分割遮罩技术帮助提取人体的形状和边界信息,为后续的骨骼关键点提取做准备。
17、骨骼关键点提取:在深度图像和rgb图像的基础上,相机使用骨骼追踪算法来提取人体的骨骼关键点。这个算法结合了深度图像和rgb图像的信息,通过骨骼检测、深度图像处理和rgb图像处理等步骤来识别人体的关节位置和方向。提取的骨骼关键点可以用于后续的姿势识别、手势分析和交互控制等应用。
18、转换世界坐标系,要将骨骼关键点转换为空间坐标的位置信息,需要使用相机的内参和外参参数。下面是一个简单的步骤:
19、获取骨骼关键点:
20、1、首先,从相机或其他骨骼追踪系统中获取骨骼关键点。这些关键点通常表示为相对于相机坐标系或图像坐标系的像素坐标。
21、2、获取相机参数:获取相机的内参和外参参数。内参参数包括相机的焦距、光学中心和图像分辨率等信息,用于将像素坐标转换为归一化坐标。外参参数包括相机的位置和方向信息,用于将归一化坐标转换为世界坐标。
22、3、像素坐标转换为归一化坐标:利用相机的内参参数,将像素坐标转换为归一化坐标。归一化坐标是将像素坐标除以图像分辨率得到的坐标,它的范围在[0,1]之间。
23、4、归一化坐标转换为相机坐标:利用相机的内参参数,将归一化坐标转换为相机坐标。相机坐标是将归一化坐标乘以深度值得到的坐标。
24、5、相机坐标转换为世界坐标:利用相机的外参参数,将相机坐标转换为世界坐标。世界坐标是相对于相机位置和方向的坐标。
25、6、通过这些转换,可以将骨骼关键点从像素坐标转换为相机坐标,然后再转换为世界坐标,以获取骨骼关键点在三维空间中的位置信息。
26、需要注意的是,具体的转换过程可能会因相机模型和坐标系约定而有所不同。在实际应用中,可以根据相机的具体参数和坐标系约定来进行适当的转换。
27、计算脊柱与垂直地面夹角
28、1、要计算脊柱骨骼与垂直地面方向的夹角,可以使用向量计算和三角函数。下面是一个简单的步骤:
29、2、获取脊柱骨骼的位置向量:首先,从骨骼关键点中获取脊柱骨骼的位置向量。这个位置向量是脊柱骨骼关键点的三维坐标减去参考点(例如骨盆或肩膀)的三维坐标得到的。
30、3、计算脊柱骨骼与垂直地面方向的夹角:对于三维向量,可以使用向量的点积和模长计算两个向量之间的夹角。垂直地面方向可以表示为[0,1,0],即y轴方向的单位向量。通过计算脊柱骨骼位置向量和垂直地面方向向量的点积,再除以两个向量的模长的乘积,可以得到夹角的余弦值。
31、import math
32、spine_vector=[x,y,z]#脊柱骨骼的位置向量
33、vertical_vector=[0,1,0]#垂直地面方向的单位向量
34、#计算点积
35、dot_product=sum(a*b for a,b in zip(spine_vector,vertical_vector))
36、#计算向量模长
37、spine_length=math.sqrt(sum(a*a for a in spine_vector))
38、vertical_length=math.sqrt(sum(a*a for a invertical_vector))
39、#计算夹角的余弦值
40、cosine_angle=dot_product/(spine_length*vertical_length)
41、#计算夹角(以弧度为单位)
42、angle=math.acos(cosine_angle)
43、通过这个计算,可以得到脊柱骨骼与垂直地面方向的夹角,以评估脊柱相对于垂直地面的倾斜程度。从而判断人体在骑马过程中的姿态,用于康复训练过程中的分析与姿态评估。
44、本发明的有益效果:本发明不仅实现了模拟马术训练,而且通过马背处压力传感器判断患者重心位置的变化,通过腿部马肚传感器采集患者是否需要加速的需求,通过脚蹬传感器判断患者脚部受力情况,通过扶手传感器判断患者手臂受力情况,通过缰绳传感器判断患者需要转弯的意愿,通过双目摄像头捕捉身体骨骼的偏移角度变化,从而实现了智能化人机交互,利用马的规律性运动模式及人马互动的所有活动,针对各种功能障碍和神经肌肉疾患病人的躯体、心理、认知、社会化及行为障碍进行治疗的一种康复治疗手段。
- 还没有人留言评论。精彩留言会获得点赞!