一种可主动进攻的武术训练设备
本发明涉及武术训练设备领域,尤其涉及一种可主动进攻的武术训练设备。
背景技术:
1、传统的武术训练常通过练习套路、对打等方式进行,但这些方法存在着一定的局限性,无法真正实现实战效果。目前已有一些针对武术训练的智能设备,如感应器材、虚拟现实训练系统等,但这些设备多为被动式训练,无法主动进攻,且缺乏对练时的真实感和互动性。
2、公告号为cn110841261a的中国专利公开了一种具有主动进攻能力的调节式武术训练桩及其训练装置,武术训练装置包括武术训练桩,武术训练桩上还设有上肢及下肢,上肢及下肢上也设有压力传感器,且上肢上还设有第二红外线反射型传感器,下肢上还设有第三红外线反射型传感器。该发明能够对训练者的击打自动做出反应,通过设定的第一及第二时间间隔来确定训练者在武术训练中的反应速度,能够更好的实现高难度武术训练。
3、但是上述已公开方案存在如下不足之处:桩体固定不动,只能模拟一些拳脚的攻击动作,无法模拟冲撞攻击即无法模拟对手移动,不能将拳脚动作与冲撞结合,难以充分模拟真人对手的攻击,实战效果不够好。
技术实现思路
1、本发明目的是针对背景技术中存在的训练桩位置固定无法模拟冲撞攻击,难以充分模拟真人对手的攻击的问题,提出一种可主动进攻的武术训练设备。
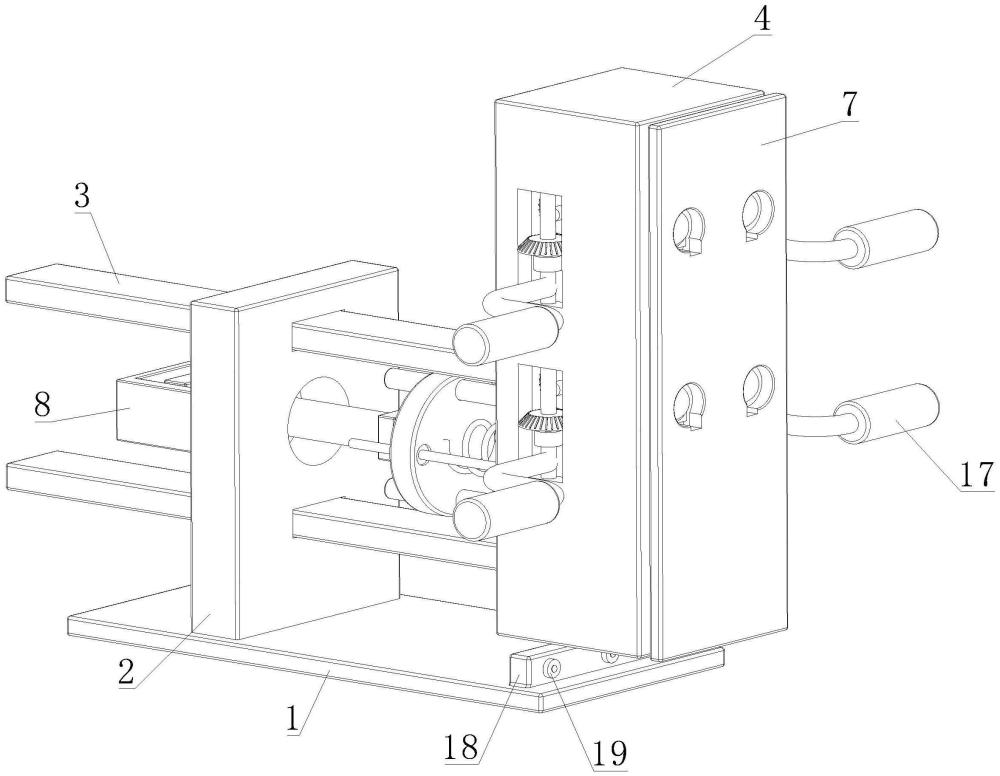
2、一方面,本发明提出一种可主动进攻的武术训练设备,包括底板、盒体、压力传感器、冲撞板、导向杆、磁性杆a、直击模拟杆和横扫模拟杆;
3、底板上设置支撑板,盒体上设置多组导向板,支撑板上设置有供导向板穿过的导向槽,支撑板上设置安装架,安装架上水平设置伸缩装置,伸缩装置穿过支撑板,伸缩装置的伸缩端设置支撑盘,支撑盘和盒体之间设置弹簧b;导向杆在盒体上水平设置多组,支撑盘上设置多组供导向杆穿过的导向孔;磁性杆a水平设置在盒体上,支撑盘上设置多组通孔,通孔孔壁上设置环形电磁铁,磁性杆a穿过环形电磁铁;冲撞板和盒体正面之间通过多组弹簧a连接;压力传感器在盒体正面设置多组;冲撞板和盒体正面均设置多组直击避让槽,直击模拟杆滑动穿过直击避让槽,盒体内设置有带动直击模拟杆前后移动的动力组件b;横扫模拟杆在盒体两侧转动设置多组,盒体内设置有带动横扫模拟杆前后转动的动力组件a;底板上设置控制系统。
4、优选的,控制系统与压力传感器数据传输连接,控制系统与伸缩装置、环形电磁铁、动力组件a以及动力组件b均控制连接。
5、优选的,还包括固定板和距离检测传感器;固定板设置在底板前端底部,固定板位于盒体下方;距离检测传感器在固定板背向支撑板的端面上设置多组,控制系统与距离检测传感器数据传输连接。
6、优选的,动力组件a包括转轴a、电磁铁a、蜗杆、蜗轮a、竖板、转轴b、锥齿轮a、锥齿轮b和磁性杆b;盒体左右两侧均并排设置多组避让槽a,转轴a竖直且转动设置在避让槽a槽底,横扫模拟杆端部与转轴a连接;电磁铁a设置在转轴a顶部且与磁性杆b底部接触;蜗杆竖直且转动设置在盒体底部内壁上,盒体顶部内壁设置有带动蜗杆转动的电机;竖板竖直设置在盒体底部内壁上;转轴b水平穿过竖板,转轴b与竖板转动连接,转轴b并排设置多组;蜗轮a设置在转轴b上,蜗轮a与蜗杆啮合;锥齿轮a和锥齿轮b分别设置在磁性杆b和转轴b上,锥齿轮a和锥齿轮b啮合,磁性杆b竖直且转动设置在避让槽a顶部槽壁上;盒体上设置有检测横扫模拟杆位置的光电传感器,控制系统与电磁铁a以及电机均控制连接,控制系统与光电传感器数据传输连接。
7、优选的,动力组件b包括转轴c、蜗轮b、转轴d、电磁铁b、齿轮和齿条;转轴c水平穿过竖板,转轴c与竖板转动连接,转轴c并排设置多组;蜗轮b设置在转轴c上,蜗轮b与蜗杆啮合;转轴d水平且转动设置在盒体左右内壁上,转轴d与转轴c相对;电磁铁b设置在转轴d端部且与转轴c端部接触,转轴c为磁性转轴;齿轮设置在转轴d上,齿条设置在直击模拟杆上,齿轮与齿条啮合;盒体内设置有检测直击模拟杆位置的光电传感器,控制系统与光电传感器数据传输连接,控制系统与电磁铁b控制连接。
8、优选的,多组直击模拟杆前端均设置弹性缓冲块,多组横扫模拟杆上均设置弹性套。
9、优选的,盒体左右内壁上设置多组导电滑环,导电滑环位于转轴d外周,导电滑环的转动端连接线与电磁铁b连接。
10、另一方面,本发明提出一种可主动进攻的武术训练设备的训练方法,包括以下步骤:
11、s1、事先设定好攻击程序,即控制伸缩装置、电磁铁a和电磁铁b的工作配合,实现冲撞、直击和横扫的动作配合;
12、s2、训练者站在冲撞板正前方一定位置处并根据攻击做出反应动作;
13、s3、当训练者被击退或者主动向后退出距离检测传感器的检测上限范围后,武术训练设备停止工作,并复位回到初始状态;
14、s4、训练者再次进入距离检测传感器的范围内后继续进行训练。
15、与现有技术相比,本发明具有如下有益的技术效果:冲撞板可以前后移动模拟实战冲撞,再结合直击模拟杆和横扫模拟杆的直接和横扫动作模拟,可以使主动进攻更加贴合实战,能充分模拟真人对手的攻击,训练效果好。且压力传感器受压后环形电磁铁断电,在弹簧b作用下盒体能向右进行一段距离的缓冲,减小冲撞对训练人员造成的伤害。另外直击模拟杆受力较大时,电磁铁b和转轴c发生相对转动,横扫模拟杆受力较大时,电磁铁a和磁性杆b发生相对转动,从而避免对训练者造成严重伤害,训练更加安全。
技术特征:
1.一种可主动进攻的武术训练设备,其特征在于,包括底板(1)、盒体(4)、压力传感器(6)、冲撞板(7)、导向杆(11)、磁性杆a(12)、直击模拟杆(16)和横扫模拟杆(17);
2.根据权利要求1所述的可主动进攻的武术训练设备,其特征在于,控制系统与压力传感器(6)数据传输连接,控制系统与伸缩装置(9)、环形电磁铁(13)、动力组件a以及动力组件b均控制连接。
3.根据权利要求1所述的可主动进攻的武术训练设备,其特征在于,还包括固定板(18)和距离检测传感器(19);固定板(18)设置在底板(1)前端底部,固定板(18)位于盒体(4)下方;距离检测传感器(19)在固定板(18)背向支撑板(2)的端面上设置多组,控制系统与距离检测传感器(19)数据传输连接。
4.根据权利要求3所述的可主动进攻的武术训练设备,其特征在于,动力组件a包括转轴a(21)、电磁铁a(22)、蜗杆(23)、蜗轮a(25)、竖板(26)、转轴b(27)、锥齿轮a(28)、锥齿轮b(29)和磁性杆b(37);盒体(4)左右两侧均并排设置多组避让槽a(20),转轴a(21)竖直且转动设置在避让槽a(20)槽底,横扫模拟杆(17)端部与转轴a(21)连接;电磁铁a(22)设置在转轴a(21)顶部且与磁性杆b(37)底部接触;蜗杆(23)竖直且转动设置在盒体(4)底部内壁上,盒体(4)顶部内壁设置有带动蜗杆(23)转动的电机(24);竖板(26)竖直设置在盒体(4)底部内壁上;转轴b(27)水平穿过竖板(26),转轴b(27)与竖板(26)转动连接,转轴b(27)并排设置多组;蜗轮a(25)设置在转轴b(27)上,蜗轮a(25)与蜗杆(23)啮合;锥齿轮a(28)和锥齿轮b(29)分别设置在磁性杆b(37)和转轴b(27)上,锥齿轮a(28)和锥齿轮b(29)啮合,磁性杆b(37)竖直且转动设置在避让槽a(20)顶部槽壁上;盒体(4)上设置有检测横扫模拟杆(17)位置的光电传感器,控制系统与电磁铁a(22)以及电机(24)均控制连接,控制系统与光电传感器数据传输连接。
5.根据权利要求4所述的可主动进攻的武术训练设备,其特征在于,动力组件b包括转轴c(30)、蜗轮b(31)、转轴d(32)、电磁铁b(33)、齿轮(34)和齿条(35);转轴c(30)水平穿过竖板(26),转轴c(30)与竖板(26)转动连接,转轴c(30)并排设置多组;蜗轮b(31)设置在转轴c(30)上,蜗轮b(31)与蜗杆(23)啮合;转轴d(32)水平且转动设置在盒体(4)左右内壁上,转轴d(32)与转轴c(30)相对;电磁铁b(33)设置在转轴d(32)端部且与转轴c(30)端部接触,转轴c(30)为磁性转轴;齿轮(34)设置在转轴d(32)上,齿条(35)设置在直击模拟杆(16)上,齿轮(34)与齿条(35)啮合;盒体(4)内设置有检测直击模拟杆(16)位置的光电传感器,控制系统与光电传感器数据传输连接,控制系统与电磁铁b(33)控制连接。
6.根据权利要求5所述的可主动进攻的武术训练设备,其特征在于,多组直击模拟杆(16)前端均设置弹性缓冲块(36),多组横扫模拟杆(17)上均设置弹性套。
7.根据权利要求6所述的可主动进攻的武术训练设备,其特征在于,盒体(4)左右内壁上设置多组导电滑环,导电滑环位于转轴d(32)外周,导电滑环的转动端连接线与电磁铁b(33)连接。
8.一种根据权利要求7所述的可主动进攻的武术训练设备的训练方法,其特征在于,包括以下步骤:
技术总结
本发明涉及武术训练设备领域,具体为一种可主动进攻的武术训练设备,其包括底板、盒体、压力传感器、冲撞板、导向杆、磁性杆a、直击模拟杆和横扫模拟杆;支撑板上设置安装架,安装架上水平设置伸缩装置,伸缩装置的伸缩端设置支撑盘,支撑盘和盒体之间设置弹簧b;支撑盘上设置多组供导向杆穿过的导向孔;通孔孔壁上设置环形电磁铁,磁性杆a穿过环形电磁铁;冲撞板和盒体正面之间通过多组弹簧a连接;盒体内设置有带动直击模拟杆前后移动的动力组件b;盒体内设置有带动横扫模拟杆前后转动的动力组件a。本发明能充分模拟真人对手的攻击,训练效果好。且能减小对训练人员造成的伤害,训练更加安全。
技术研发人员:霍亚丽
受保护的技术使用者:山东政法学院
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!