一种具有磁各向异性的木质机器人制备方法
1.本发明涉及一种木质机器人制备方法。
背景技术:
2.现有的微型机器人的制备方法耗能大,制备工艺复杂,对实验设备要求较高,且制备的微型机器人由于材料自身的高密度导致驱动效率低,随着能源危机的加剧和环境问题的日益突出,开发制备简单、节约能源、绿色可持续的智能响应材料是未来集中的研究趋势。
3.在微型机器人的所有驱动方式中,磁场驱动由于具有安全性、获取简单、快速响应的特点被广泛研究。目前磁控软体机器人大多以聚合物作为躯体材料,不能作为承载药物用于靶向治疗的机器人。
技术实现要素:
4.本发明要解决现有微型机器人驱动效率低,不能承载药物的问题,进而提供一种具有磁各向异性的木质机器人制备方法。
5.一种具有磁各向异性的木质机器人制备方法,它是按以下步骤进行的:
6.一、脱木质素处理:
7.将木材浸渍于质量百分数为1%~10%的naclo2溶液中,得到反应体系,向反应体系中加入冰乙酸调节反应体系的ph至1~6,反应体系密封后加热至60℃~130℃,并在温度为60℃~130℃的条件下,加热1h~36h,反应后降至室温,取出木材清洗,然后冷冻干燥,得到脱木质素后的白色木材;
8.二、磁性木材的制备:
9.将磁性粒子加入到水中并超声处理,得到混合物a,将脱木质素后的白色木材浸渍于混合物a中,在真空度为5pa~50pa的条件下,密封5min~30min,然后取出木材冷冻干燥,得到具有磁性的磁性木材;
10.所述的混合物a中磁性粒子的质量百分数为0.5%~5%;
11.三、磁驱动木材机器人的制备:
12.将具有磁性的磁性木材放置在脉冲强磁场磁化设备中,在脉冲强磁场为0.1t~4t的条件下,磁化处理1s~30s,即完成具有磁各向异性的木质机器人制备方法。
13.本发明的有益效果是:
14.利用自然界来源广泛、绿色可持续的天然木材为基体材料,木材的轻质属性为高效驱动、节约能源提供了支持条件。脱木素处理使得更多的带有羟基基团的纳米纤维素暴露出来,为磁性粒子的负载提供了活性位点,增加了化学可及性。不同磁场磁化处理磁性木材得到可以调节的磁性能,磁化处理使得磁性粒子的磁矩定向排列,赋予了磁性木材类似磁铁般的性质,木材机器人具有n极和s极的同时具有磁吸引能力。另外具有多孔蜂窝状的结构为负载磁性粒子和微纳级别尺寸的药物提供了模板,提供了复杂运动的有效使用性。
该制备过程简单、能耗少、成本低、所制备的机器人质量低易于驱动。
15.说明书附图
16.图1为实施例五制备的木质机器人的宏观照片;
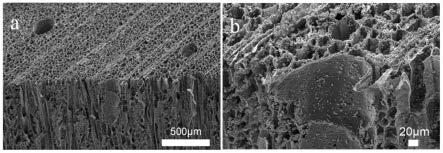
17.图2为实施例五制备的木质机器人的扫描电子显微镜照片,a为放大300倍,b为放大800倍;
18.图3为在不同磁场磁化下,实施例一至七制备的木质机器人的剩磁大小对比图;
19.图4为磁滞回线对比图,1为原始木材,2为对比实验制备的木质机器人,3为实施例五制备的木质机器人;
20.图5为两块实施例五制备的木质机器人之间的磁力大小和距离的关系曲线;
21.图6为实施例五制备的木质机器人未负载罗丹明b和负载罗丹明b的荧光显微镜照片,(a)为未负载罗丹明b,(b)为负载罗丹明b;
22.图7为负载磁性粒子的质量对比图,a为对比实验制备的木质机器人,b为实施例五制备的木质机器人;
23.图8为实施例五制备的木质机器人溶解释放和磁场驱动释放的药物速度对比图,a为溶解释放,b为磁场驱动释放;
24.图9为实施例五制备的木质机器人在硅油和水中游动前进的示意图,a为硅油,b为水。
具体实施方式
25.具体实施方式一:本实施方式一种具有磁各向异性的木质机器人制备方法,它是按以下步骤进行的:
26.一、脱木质素处理:
27.将木材浸渍于质量百分数为1%~10%的naclo2溶液中,得到反应体系,向反应体系中加入冰乙酸调节反应体系的ph至1~6,反应体系密封后加热至60℃~130℃,并在温度为60℃~130℃的条件下,加热1h~36h,反应后降至室温,取出木材清洗,然后冷冻干燥,得到脱木质素后的白色木材;
28.二、磁性木材的制备:
29.将磁性粒子加入到水中并超声处理,得到混合物a,将脱木质素后的白色木材浸渍于混合物a中,在真空度为5pa~50pa的条件下,密封5min~30min,然后取出木材冷冻干燥,得到具有磁性的磁性木材;
30.所述的混合物a中磁性粒子的质量百分数为0.5%~5%;
31.三、磁驱动木材机器人的制备:
32.将具有磁性的磁性木材放置在脉冲强磁场磁化设备中,在脉冲强磁场为0.1t~4t的条件下,磁化处理1s~30s,即完成具有磁各向异性的木质机器人制备方法。
33.本实施方式的有益效果是:
34.利用自然界来源广泛、绿色可持续的天然木材为基体材料,木材的轻质属性为高效驱动、节约能源提供了支持条件。脱木素处理使得更多的带有羟基基团的纳米纤维素暴露出来,为磁性粒子的负载提供了活性位点,增加了化学可及性。不同磁场磁化处理磁性木材得到可以调节的磁性能,磁化处理使得磁性粒子的磁矩定向排列,赋予了磁性木材类似
磁铁般的性质,木材机器人具有n极和s极的同时具有磁吸引能力。另外具有多孔蜂窝状的结构为负载磁性粒子和微纳级别尺寸的药物提供了模板,提供了复杂运动的有效使用性。该制备过程简单、能耗少、成本低、所制备的机器人质量低易于驱动。
35.具体实施方式二:本实施方式与具体实施方式一不同的是:步骤一中所述的木材高为3mm~10mm,宽为3mm~10mm,长为10mm~20mm。其它与具体实施方式一相同。
36.具体实施方式三:本实施方式与具体实施方式一或二之一不同的是:步骤一中所述的木材为针叶材或阔叶材。其它与具体实施方式一或二相同。
37.具体实施方式四:本实施方式与具体实施方式一至三之一不同的是:步骤一中所述的清洗具体为将木材置于温度为60℃~90℃的去离子水中,水浴加热1h~3h,然后更换去离子水,重复水浴加热1次~5次。其它与具体实施方式一至三相同。
38.具体实施方式五:本实施方式与具体实施方式一至四之一不同的是:步骤二中所述的磁性粒子为钐钴、钕铁硼或铝镍钴。其它与具体实施方式一至四相同。
39.具体实施方式六:本实施方式与具体实施方式一至五之一不同的是:步骤二中所述的超声处理具体为在功率为100w~1200w的条件下,超声处理5min~60min。其它与具体实施方式一至五相同。
40.具体实施方式七:本实施方式与具体实施方式一至六之一不同的是:步骤一及步骤二中所述的冷冻干燥具体为在温度为-25℃~-15℃的条件下,冷冻6h~12h,然后置于真空冷冻干燥机中,在温度为-25℃~-15℃及真空度为5pa~50pa条件下,干燥3h~24h。其它与具体实施方式一至六相同。
41.具体实施方式八:本实施方式与具体实施方式一至七之一不同的是:步骤一中向反应体系中加入冰乙酸调节反应体系的ph至4.6~6,反应体系密封后加热至90℃~130℃,并在温度为90℃~130℃的条件下,加热18h~36h。其它与具体实施方式一至七相同。
42.具体实施方式九:本实施方式与具体实施方式一至八之一不同的是:步骤二中所述的混合物a中磁性粒子的质量百分数为1%~5%。其它与具体实施方式一至八相同。
43.具体实施方式十:本实施方式与具体实施方式一至九之一不同的是:步骤三中在脉冲强磁场为2t~4t的条件下,磁化处理1s~5s。其它与具体实施方式一至九相同。
44.采用以下实施例验证本发明的有益效果:
45.实施例一:
46.一种具有磁各向异性的木质机器人制备方法,它是按以下步骤进行的:
47.一、脱木质素处理:
48.将木材浸渍于质量百分数为5%的naclo2溶液中,得到反应体系,向反应体系中加入冰乙酸调节反应体系的ph至4.6,反应体系密封后加热至90℃,并在温度为90℃的条件下,加热18h,反应后降至室温,取出木材清洗,然后冷冻干燥,得到脱木质素后的白色木材;
49.二、磁性木材的制备:
50.将磁性粒子加入到水中并超声处理,得到混合物a,将脱木质素后的白色木材浸渍于混合物a中,在真空度为10pa的条件下,密封20min,然后取出木材冷冻干燥,得到具有磁性的磁性木材;
51.所述的混合物a中磁性粒子的质量百分数为2%;
52.三、磁驱动木材机器人的制备:
53.将具有磁性的磁性木材放置在脉冲强磁场磁化设备中,在脉冲强磁场为0.1t的条件下,磁化处理3s,得到木质机器人。
54.步骤一中所述的木材高为3mm,宽为3mm,长为10mm。
55.步骤一中所述的木材为巴沙木。
56.步骤一中所述的清洗具体为将木材置于温度为90℃的去离子水中,水浴加热3h,然后更换去离子水,重复水浴加热3次。
57.步骤二中所述的磁性粒子为钕铁硼。
58.步骤二中所述的超声处理具体为在功率为300w的条件下,超声处理15min。
59.步骤一及步骤二中所述的冷冻干燥具体为在温度为-25℃的条件下,冷冻6h,然后置于真空冷冻干燥机中,在温度为-25℃及真空度为10pa的条件下,干燥12h。
60.实施例二:本实施例与实施例一不同的是:步骤三中在脉冲强磁场为0.5t的条件下,磁化处理3s。其它与实施例一相同。
61.实施例三:本实施例与实施例一不同的是:步骤三中在脉冲强磁场为1t的条件下,磁化处理3s。其它与实施例一相同。
62.实施例四:本实施例与实施例一不同的是:步骤三中在脉冲强磁场为1.5t的条件下,磁化处理3s。其它与实施例一相同。
63.实施例五:本实施例与实施例一不同的是:步骤三中在脉冲强磁场为2t的条件下,磁化处理3s。其它与实施例一相同。
64.实施例六:本实施例与实施例一不同的是:步骤三中在脉冲强磁场为3t的条件下,磁化处理3s。其它与实施例一相同。
65.实施例七:本实施例与实施例一不同的是:步骤三中在脉冲强磁场为4t的条件下,磁化处理3s。其它与实施例一相同。
66.对比实验:本实施例与实施例五不同的是:省略步骤一,步骤二中将原始木材浸渍于混合物a中。其它与实施例五相同。
67.图1为实施例五制备的木质机器人的宏观照片;由图可知,木材机器人的尺寸很小,体现了轻质的特点。
68.图2为实施例五制备的木质机器人的扫描电子显微镜照片,a为放大300倍,b为放大800倍;由图可知,木材的微观形貌保持良好,没有遭到破坏,磁性粒子在木材上均匀分布,没有出现团聚现象。
69.图3为在不同磁场磁化下,实施例一至七制备的木质机器人的剩磁大小对比图。由图可知,随着磁场强度增加,木质机器人的剩磁大小逐渐增加,可达到63.68emu/g。
70.图4为磁滞回线对比图,1为原始木材,2为对比实验制备的木质机器人,3为实施例五制备的木质机器人。由图可知,经过脱木素处理的木材可以负载更多的磁性粒子,相比原始木材和原始木材负载的磁性粒子具有较强的磁性。
71.图5为两块实施例五制备的木质机器人之间的磁力大小和距离的关系曲线。由图可知,两块木材机器人靠近时候能相互吸引,随着两块木材机器人之间的距离增加,磁力逐渐降低。
72.图6为实施例五制备的木质机器人未负载罗丹明b和负载罗丹明b的荧光显微镜照片,(a)为未负载罗丹明b,(b)为负载罗丹明b。由图可知,以罗丹明b用来模拟药物,证明了
木材天然孔道能够作为承载药物用于生物医疗的基体材料。
73.图7为负载磁性粒子的质量对比图,a为对比实验制备的木质机器人,b为实施例五制备的木质机器人;说明脱木素木材可以负载更多磁性粒子,可达到0.113g,所以驱动的能力就越高。
74.图8为实施例五制备的木质机器人溶解释放和磁场驱动释放的药物速度对比图,a为溶解释放,b为磁场驱动释放;释放条件为盐酸模拟胃液酸性条件,ph值为1.8左右,说明了磁场驱动的方式释放的速率更快(磁场驱动强度为50mt),可达到10.11mg l-1
s-1
,而常规释放的方式药物释放速率仅为0.203mg l-1
s-1
。
75.图9为实施例五制备的木质机器人在硅油和水中游动前进的示意图,a为硅油,b为水;磁场驱动强度为50mt,由图可知,木材机器人在硅油和水中两种不同粘度的液体中仍然能游动前进,说明了木材磁控木材机器人即使小磁场也有较强的驱动能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1